Recommended
PDF
[DL輪読会]Deep Reinforcement Learning that Matters
PDF
【チュートリアル】コンピュータビジョンによる動画認識
PDF
PPTX
[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...
PDF
[DL輪読会]Control as Inferenceと発展
PPTX
[DL輪読会]Learning agile and dynamic motor skills for legged robots
PDF
PPTX
PDF
PPTX
SSII2020SS: グラフデータでも深層学習 〜 Graph Neural Networks 入門 〜
PPTX
Reinforcement Learning(方策改善定理)
PDF
PDF
DQNからRainbowまで 〜深層強化学習の最新動向〜
PPTX
[DL輪読会]Life-Long Disentangled Representation Learning with Cross-Domain Laten...
PPTX
PDF
PDF
[Dl輪読会]introduction of reinforcement learning
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
PDF
PPTX
[DL輪読会]Grandmaster level in StarCraft II using multi-agent reinforcement lear...
PPTX
統計的因果推論からCausalMLまで走り抜けるスライド
PDF
PDF
Tech-Circle #18 Pythonではじめる強化学習 OpenAI Gym 体験ハンズオン
PDF
PPTX
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
PDF
PPTX
PDF
PDF
PDF
はじめての確率論 測度から確率へ 57~60ページ ノート
More Related Content
PDF
[DL輪読会]Deep Reinforcement Learning that Matters
PDF
【チュートリアル】コンピュータビジョンによる動画認識
PDF
PPTX
[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...
PDF
[DL輪読会]Control as Inferenceと発展
PPTX
[DL輪読会]Learning agile and dynamic motor skills for legged robots
PDF
PPTX
What's hot
PDF
PPTX
SSII2020SS: グラフデータでも深層学習 〜 Graph Neural Networks 入門 〜
PPTX
Reinforcement Learning(方策改善定理)
PDF
PDF
DQNからRainbowまで 〜深層強化学習の最新動向〜
PPTX
[DL輪読会]Life-Long Disentangled Representation Learning with Cross-Domain Laten...
PPTX
PDF
PDF
[Dl輪読会]introduction of reinforcement learning
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
PDF
PPTX
[DL輪読会]Grandmaster level in StarCraft II using multi-agent reinforcement lear...
PPTX
統計的因果推論からCausalMLまで走り抜けるスライド
PDF
PDF
Tech-Circle #18 Pythonではじめる強化学習 OpenAI Gym 体験ハンズオン
PDF
PPTX
PILCO - 第一回高橋研究室モデルベース強化学習勉強会
PDF
PPTX
PDF
Viewers also liked
PDF
PDF
はじめての確率論 測度から確率へ 57~60ページ ノート
PDF
PDF
PDF
深層リカレントニューラルネットワークを用いた日本語述語項構造解析
PDF
Tokyo r 11_self_organizing_map
PDF
Gibbs cloner を用いた組み合わせ最適化と cross-entropy を用いた期待値推計: 道路ネットワーク強靭化のための耐震化戦略を例として
PDF
Deep Reinforcement Learning Through Policy Optimization, John Schulman, OpenAI
PDF
Lecture7 cross validation
PDF
PDF
PPTX
Step by Stepで学ぶ自然言語処理における深層学習の勘所
PDF
Information-Theoretic Metric Learning
PDF
PDF
RStanとShinyStanによるベイズ統計モデリング入門
PDF
「HOME'Sデータセット」を活用した不動産物件画像への深層学習の適用の取り組み
PPTX
PDF
PDF
PDF
Similar to 「これからの強化学習」勉強会#2
PPTX
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
PDF
Top-K Off-Policy Correction for a REINFORCE Recommender System
PDF
Computational Motor Control: Reinforcement Learning (JAIST summer course)
PDF
PDF
【論文紹介】PGQ: Combining Policy Gradient And Q-learning
PDF
PDF
分散型強化学習手法の最近の動向と分散計算フレームワークRayによる実装の試み
PPTX
Hierarchical and Interpretable Skill Acquisition in Multi-task Reinforcement ...
PDF
PDF
Gunosyデータマイニング研究会 #118 これからの強化学習
PDF
PPTX
PDF
PDF
強化学習とは (MIJS 分科会資料 2016/10/11)
PPTX
PDF
PPTX
PDF
SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜
PDF
ゼロから始める深層強化学習(NLP2018講演資料)/ Introduction of Deep Reinforcement Learning
PPTX
【輪読会】Braxlines: Fast and Interactive Toolkit for RL-driven Behavior Engineeri...
「これからの強化学習」勉強会#2 1. 「これからの強化学習」勉強会#2
テキスト
これからの強化学習
牧野 貴樹 澁谷 長史 白川 真一 浅田 稔 麻生 英樹 荒井 幸代 飯間 等 伊藤 真
大倉 和博 黒江 康明 杉本 徳和 坪井 祐太 銅谷 賢治 前田 新一 松井 藤五郎
南 泰浩 宮崎 和光 目黒 豊美 森村 哲郎 森本 淳 保田 俊行 吉本 潤一郎
森北出版 2016-10-27
Amazonで詳しく見る by G-Tools
今回の範囲
第1章 強化学習の基礎的理論 ―― 1.4節~1.5節
第2章 強化学習の発展的理論
第3章 強化学習の工学応用
第4章 知能のモデルとしての強化学習
2017/01/02 Chihiro Kusunoki
2. 3. 前回までのあらすじ
強化学習問題を解く( ⇔ 最適方策 π* を求める )には、最適行動
価値関数 Q* を解けばよい( or 数値的に推定すればよい )。
→ ただし、前回までの解法だと状態集合や行動集合が連続的なとき困る。
連続的だと評価・改善対象の π(a|s),Q(s, a) を配列で表現できず
サンプルエピソード生成や逐次近似による Q* の推定ができない。
そのような場合そもそも π* の存在も保証されていない(要出典)。
• 状態集合や行動集合が離散集合でない例:
‐ 空の色を見て(状態)、再現すべく絵の具を混ぜる(行動)。
※ 空の色をデジカメで取り込む場合は、状態は離散的かもしれない。
‐ 川の流れの向きと速さを検知して(状態)、最短距離で対岸に
着くようにラジコンボートの舵を制御する(行動)。
※ センサやアクチュエータによっては離散的かもしれない。
‐ ギョウザの味をみて(状態)、満足度が高くなるような比率で
酢・醤油・ラー油を混ぜる(行動)。
※ 満足度を数値化するメカニズムは謎。
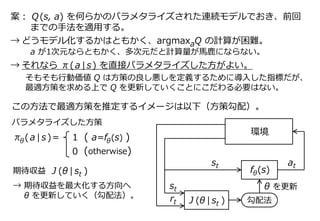
4. 案: Q(s, a) を何らかのパラメタライズされた連続モデルでおき、前回
までの手法を適用する。
→ どうモデル化するかはともかく、argmaxaQ の計算が困難。
a が1次元ならともかく、多次元だと計算量が馬鹿にならない。
→ それなら π(a|s) を直接パラメタライズした方がよい。
そもそも行動価値 Q は方策の良し悪しを定義するために導入した指標だが、
最適方策を求める上で Q を更新していくことにこだわる必要はない。
st
π (a|s)= 1 ( a=f (s) )θ θ
0 (otherwise)
f (s)θ
at
環境
rt
st
J (θ | st )
θ を更新
勾配法
この方法で最適方策を推定するイメージは以下(方策勾配)。
パラメタライズした方策
期待収益
→ 期待収益を最大化する方向へ
θ を更新していく(勾配法)。
J (θ | st )
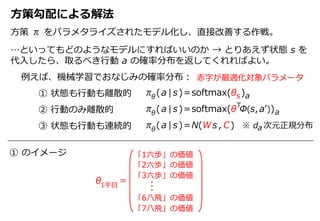
5. 方策勾配による解法
方策 π をパラメタライズされたモデル化し、直接改善する作戦。
…といってもどのようなモデルにすればいいのか → とりあえず状態 s を
代入したら、取るべき行動 a の確率分布を返してくれればよい。
π (a|s)=softmax(θ )θ s a
θ =1手目
「1六歩」の価値
「2六歩」の価値
「3六歩」の価値
「6八飛」の価値
「7八飛」の価値
π (a|s)=softmax(θ Φ(s,a’))θ a
T
① 状態も行動も離散的
② 行動のみ離散的
③ 状態も行動も連続的 π (a|s)=N(Ws ,C)θ ※ d 次元正規分布
例えば、機械学習でおなじみの確率分布:
① のイメージ
赤字が最適化対象パラメータ
a
6. 眠さ
ストレス
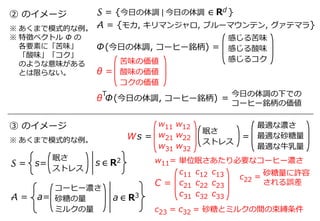
② のイメージ
Φ(今日の体調, コーヒー銘柄) =
感じる苦味
感じる酸味
感じるコク
A = {モカ, キリマンジャロ, ブルーマウンテン, グァテマラ}
θ =
苦味の価値
酸味の価値
コクの価値
※ あくまで模式的な例。
※ 特徴ベクトル Φ の
各要素に「苦味」
「酸味」「コク」
のような意味がある
とは限らない。
③ のイメージ
A =
※ あくまで模式的な例。
S = {今日の体調 | 今日の体調 ∈ Rd }
コーヒー濃さ
砂糖の量
ミルクの量
a= a ∈ R3
S = s= s ∈ R2
Ws =
眠さ
ストレス
w11
w21
w31
w12
w22
w32
θ Φ(今日の体調, コーヒー銘柄) =
T 今日の体調の下での
コーヒー銘柄の価値
最適な濃さ
最適な砂糖量
最適な牛乳量
=
w11= 単位眠さあたり必要なコーヒー濃さ
c11
c21
c31
c12
c22
c32
c13
c23
c33
C =
c22 = 砂糖量に許容
される誤差
c23 = c32 = 砂糖とミルクの間の束縛条件
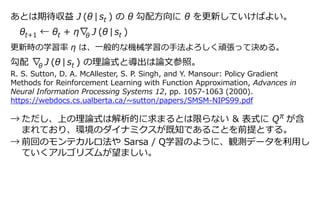
7. あとは期待収益 J (θ | st ) の θ 勾配方向に θ を更新していけばよい。
θt+1 ← θt + η∇ J (θ | st )
更新時の学習率 η は、一般的な機械学習の手法よろしく頑張って決める。
勾配 ∇ J (θ | st ) の理論式と導出は論文参照。
→ ただし、上の理論式は解析的に求まるとは限らない & 表式に Q が含
まれており、環境のダイナミクスが既知であることを前提とする。
→ 前回のモンテカルロ法や Sarsa / Q学習のように、観測データを利用し
ていくアルゴリズムが望ましい。
θ
R. S. Sutton, D. A. McAllester, S. P. Singh, and Y. Mansour: Policy Gradient
Methods for Reinforcement Learning with Function Approximation, Advances in
Neural Information Processing Systems 12, pp. 1057-1063 (2000).
https://webdocs.cs.ualberta.ca/~sutton/papers/SMSM-NIPS99.pdf
π
θ
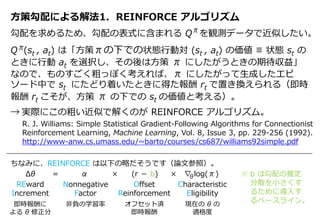
8. 方策勾配による解法1. REINFORCE アルゴリズム
勾配を求めるため、勾配の表式に含まれる Q を観測データで近似したい。
Q (st , at) は「方策πの下での状態行動対 (st , at) の価値 ≡ 状態 st の
ときに行動 at を選択し、その後は方策 π にしたがうときの期待収益」
なので、ものすごく粗っぽく考えれば、π にしたがって生成したエピ
ソード中で st にたどり着いたときに得た報酬 rt で置き換えられる(即時
報酬 rt こそが、方策 π の下での st の価値と考える)。
→ 実際にこの粗い近似で解くのが REINFORCE アルゴリズム。
π
π
R. J. Williams: Simple Statistical Gradient-Following Algorithms for Connectionist
Reinforcement Learning, Machine Learning, Vol. 8, Issue 3, pp. 229-256 (1992).
http://www-anw.cs.umass.edu/~barto/courses/cs687/williams92simple.pdf
ちなみに、REINFORCE は以下の略だそうです(論文参照)。
Δθ = α × (r - b) × ∇ log(π)
REward
Increment
即時報酬に
よる θ 修正分
Nonnegative
Factor
非負の学習率
Offset
Reinforcement
オフセット済
即時報酬
Characteristic
Eligibility
現在の θ の
適格度
θ ※ b は勾配の推定
分散を小さくす
るために導入す
るベースライン。
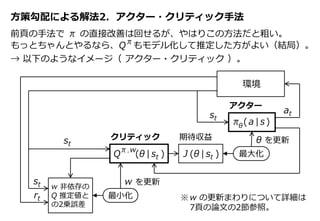
9. 方策勾配による解法2. アクター・クリティック手法
前頁の手法で π の直接改善は回せるが、やはりこの方法だと粗い。
もっとちゃんとやるなら、Q もモデル化して推定した方がよい(結局)。
st
at
環境
rt
st
J (θ | st )
θ を更新
最大化
π,w
Q (θ | st )
π (a|s)θ
アクター
クリティック 期待収益
w を更新
最小化
st
π
→ 以下のようなイメージ( アクター・クリティック )。
w 非依存の
Q 推定値と
の2乗誤差
※w の更新まわりについて詳細は
7頁の論文の2節参照。
10. アクター(行動器)= 推定方策: 行動を決定する。
クリティック(評価器)= 推定価値関数: 行動の結果を評価する。
前頁の図のようなサイクルを組めば、方策勾配による π の改善が回せる。
ここで疑問: θ 空間における勾配方向に θ を更新するのでいいのか。
最終目標は π を最もよい方策にしてくれる θ を見つけることだった。
→ θ 空間において勾配をみてその方向に θ 動かすより、π がよくなる
ような方向に動かす方がよいのでは。
→ 確率分布間の距離はカルバック・ライブラー情報量という指標がある。
この距離に基づいた指標を自然勾配という。方策勾配による解法では
自然勾配を用いた方が性能が向上する。
θ
θ
Shun-ichi Amari. Natural Gradient Works Efficiently in Learning, Neural
Computation, Vol. 10, No. 2, pp. 251-276 (1998).
http://www.maths.tcd.ie/~mnl/store/Amari1998a.pdf
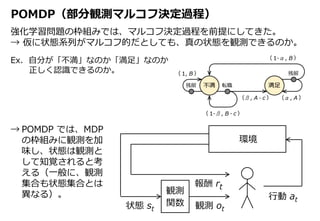
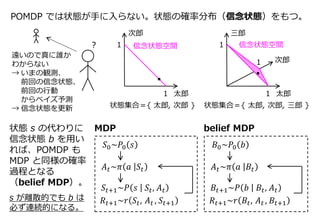
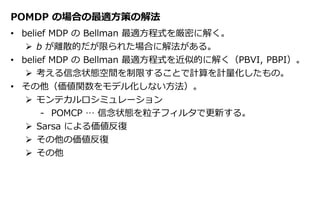
11. 12. 13. POMDP の場合の最適方策の解法
• belief MDP の Bellman 最適方程式を厳密に解く。
b が離散的だが限られた場合に解法がある。
• belief MDP の Bellman 最適方程式を近似的に解く(PBVI, PBPI)。
考える信念状態空間を制限することで計算を計量化したもの。
• その他(価値関数をモデル化しない方法)。
モンテカルロシミュレーション
‐ POMCP … 信念状態を粒子フィルタで更新する。
Sarsa による価値反復
その他の価値反復
その他
![[DL輪読会]Deep Reinforcement Learning that Matters](https://cdn.slidesharecdn.com/ss_thumbnails/deeprlthatmatters-171212050658-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...](https://cdn.slidesharecdn.com/ss_thumbnails/20190426akuzawa-190426020057-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Control as Inferenceと発展](https://cdn.slidesharecdn.com/ss_thumbnails/20191004-191204055019-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Learning agile and dynamic motor skills for legged robots](https://cdn.slidesharecdn.com/ss_thumbnails/dlseminar0125nishimura-190125001509-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]Life-Long Disentangled Representation Learning with Cross-Domain Laten...](https://cdn.slidesharecdn.com/ss_thumbnails/20180914iwasawa-180919025635-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Dl輪読会]introduction of reinforcement learning](https://cdn.slidesharecdn.com/ss_thumbnails/dlintroductionofreinforcementlearning-161121061444-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Grandmaster level in StarCraft II using multi-agent reinforcement lear...](https://cdn.slidesharecdn.com/ss_thumbnails/alphastarfinal-191227002114-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DLHacks]DeepなSSM](https://cdn.slidesharecdn.com/ss_thumbnails/deepssm1-191021112415-thumbnail.jpg?width=640&height=640&fit=bounds)







































![SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2-01-210607042910-thumbnail.jpg?width=640&height=640&fit=bounds)

