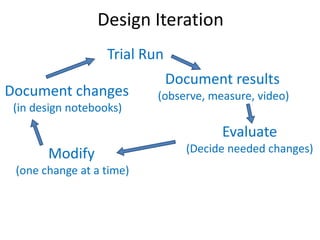
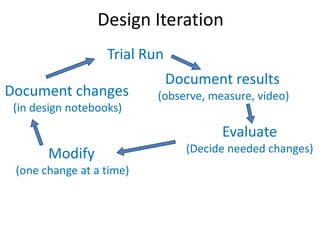
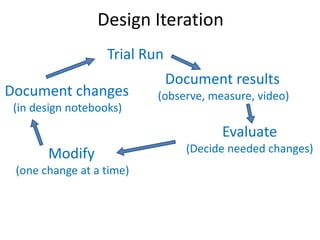
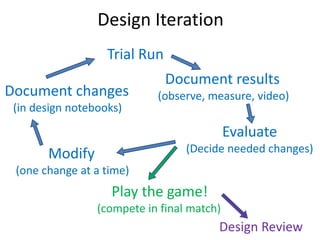
A robot is an automatic mechanical device guided by a computer program or electronic circuitry. Robots are used to go where people can't or don't want to go, such as dangerous, expensive, or difficult environments like space or undersea. Engineers design and build robots by following a process that involves determining requirements, designing subsystems, integrating systems, testing iterations, and modifying designs until the robot can perform its intended functions. The design process focuses on understanding needs, generating concepts, planning, building, testing, and refining a robotic system.