The document outlines a thesis focused on synthesizing action sequences in planning, particularly incorporating trajectory constraints via linear temporal logic over finite traces (ltlf). It discusses the design and implementation of automata for ltlf goals and describes two approaches to planning: a traditional method and a novel simulation-based planner. The results include working implementations of various automata and planning approaches, with future work suggesting further advancements in the automata methodology.

![19/01/2018Planning For Linear Time Terminating
Specification
Thesis Goals
4
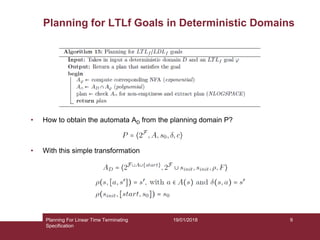
• Design and implement the automata construction starting from an
LTLf formula [DeGiacomoVardiIJCAI13,14,15]
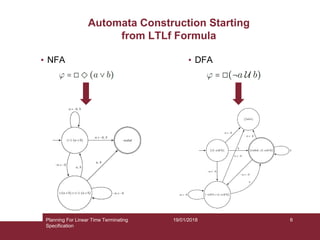
– NFA
– DFA
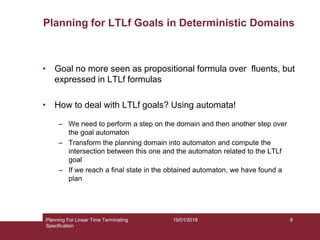
• Formulate how to do planning for LTLf goals exploiting such
automata constructions
– Focus the attention on deterministic domains (classical planning)
– But also explore more advanced forms (FONDsp, FONDsc,PONDsp )
• Design and implement the state-of-the-art approach for planning for
LTLf goals [TorresBaierIJCAI15]
• Design and implement the automata based approach, using a new
planner [FrancesGeffnerIJCAI17] that exploits calls to code
(instead of actions) to progress
– In collaboration with Guillem Frances (UPF, Barcelona)](https://image.slidesharecdn.com/masterthesispresentation-180119113355/85/Master-thesis-presentation-4-320.jpg)
![19/01/2018
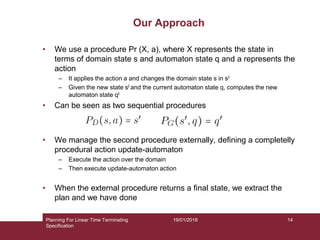
Our Approach
• Possible with the usage of a simulation based planner: FS Planner
[FrancesGeffnerIJCAI17]
• It works in simulation mode using search algorithms based on
novelty
• Uses the definition of Factored State Model: a generalization w.r.t.
the declarative formalization of planning problems
– Defines action precondition, effects and cost as Black-Box procedures
– We are making no assumption about the description form.
• Simulator: factored state model
where are defined as black-box procedures
Planning For Linear Time Terminating
Specification
13](https://image.slidesharecdn.com/masterthesispresentation-180119113355/85/Master-thesis-presentation-13-320.jpg)
![19/01/2018
Conclusions
• Thesis results
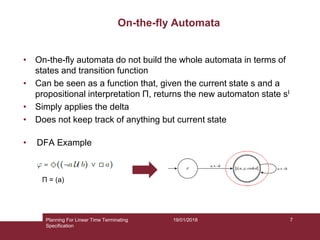
– Implementation of the NFA/DFA (and on the fly variants) construction
from an LTLf formula
– Formulation planning for LTLf goals, by exploiting such automata
constructions
– A working implementation of [TorresBaierIJCAI15] approach
– A working implementation of our new approach on the novel planner by
Guillem Frances (UPF, Barcelona) [FrancesGeffnerIJCAI17]
• Future work
– The automata approach can be really extended to more advanced
planning forms (differently from [TorresBaierIJCAI15])
– FONDsp, FONDsc PONDsp
Planning For Linear Time Terminating
Specification
16](https://image.slidesharecdn.com/masterthesispresentation-180119113355/85/Master-thesis-presentation-16-320.jpg)