Download to read offline
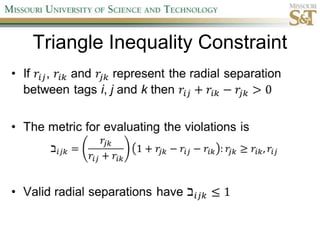
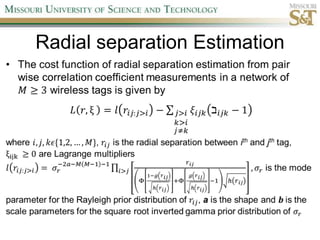
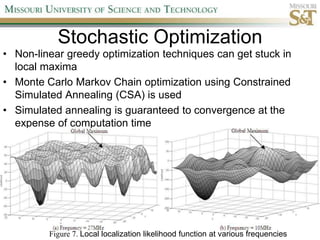
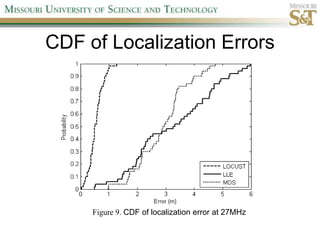
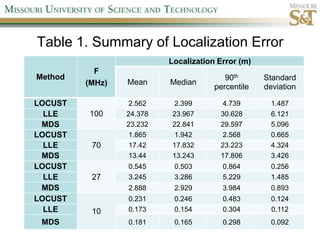

This document proposes a new localization algorithm called LOCUST that uses correlation coefficient estimates between pairwise wireless tags. It derives the probability distributions needed to estimate correlation coefficients and radial distances between tags. A cost function is defined incorporating these distributions and triangle inequality constraints. Constrained simulated annealing and a stochastic tunneling operator are used to optimize this non-linear, non-convex cost function. Simulation results show LOCUST has better localization accuracy than existing methods at high frequencies (>10MHz) but convergence time is still a concern.



































































