Download as PDF, PPTX

















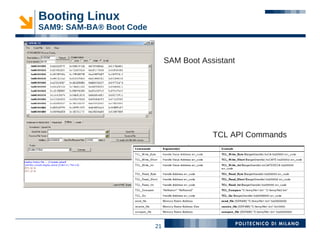





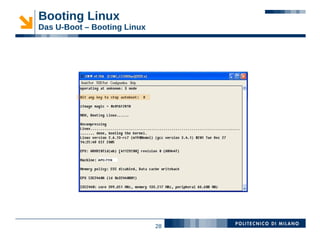


















The document discusses how to add Linux support for a new board. It covers customizing hardware design from a reference design, adding board support code for the bootloader and Linux kernel, and building a custom user-space distribution. The key steps involve customizing the hardware design, porting the bootloader (AT91Bootstrap and U-Boot), adding board support to the Linux kernel, and using a build system like OpenEmbedded to create a custom user-space distribution.