Downloaded 32 times

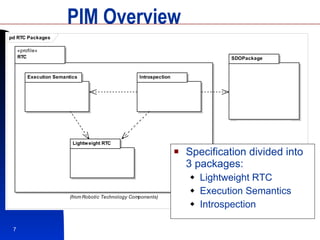
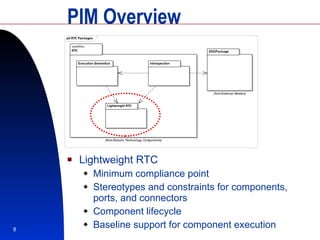
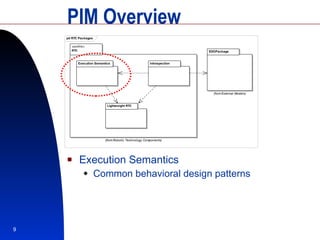
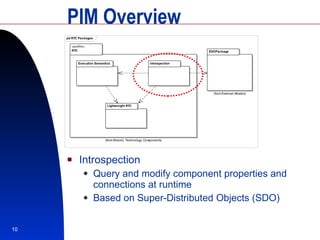
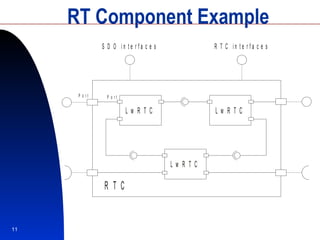

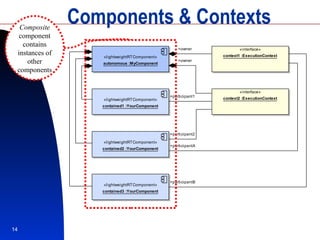

The document outlines the revised specification for RTC (Real-Time Component) robotic technology, addressing challenges in distributed robotic systems related to programming practices and collaboration among developers. It introduces features such as a well-defined component lifecycle, support for dynamic composition, and compliance with existing standards like UML and CORBA. The specification emphasizes the importance of reusability, interoperability, and introspection capabilities for components in robotic applications.
![[2016/2017] AADL (Architecture Analysis and Design Language)](https://cdn.slidesharecdn.com/ss_thumbnails/ivano05saaadl-161220160416-thumbnail.jpg?width=640&height=640&fit=bounds)

![[2015/2016] AADL (Architecture Analysis and Design Language)](https://cdn.slidesharecdn.com/ss_thumbnails/07saaadl-151204104852-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)








![Blue_Futuristic_Technology_Presentation_(3)[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/bluefuturistictechnologypresentation31-250520171656-4912de65-thumbnail.jpg?width=640&height=640&fit=bounds)


















































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)
