Download as PDF, PPTX

![Gelman and Rubin, 1996
“[...] as emphasized in Rubin (1984), one of the great scientific
advantages of simulation analysis of Bayesian methods is the freedom
it gives the researcher to formulate appropriate models rather than be
overly interested in analytically neat but scientifically inappropriate
models.”
Approximate Bayesian Computation and Synthetic Likelihoods are
two approximate methods for inference, with ABC vastly more
popular and with older origins.
We will discuss ABC only.
Umberto Picchini (umberto@maths.lth.se)](https://image.slidesharecdn.com/abcslides-160217212955/85/Intro-to-Approximate-Bayesian-Computation-ABC-11-320.jpg)
![Likelihood free rejection sampling
1 simulate from the prior θ∗ ∼ π(θ)
2 plug θ∗ in your model and simulate a y∗ [this is the same as
writing y∗ ∼ p(y|θ∗)]
3 if y∗ = y store θ∗. Go to step 1 and repeat.
The above is a likelihood free algorithm: it does not require
knowledge of the expression of p(y|θ).
Each accepted θ∗ is such that θ∗ ∼ π(θ|y) exactly.
We justify the result in next slide.
Umberto Picchini (umberto@maths.lth.se)](https://image.slidesharecdn.com/abcslides-160217212955/85/Intro-to-Approximate-Bayesian-Computation-ABC-16-320.jpg)
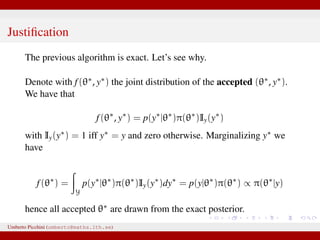
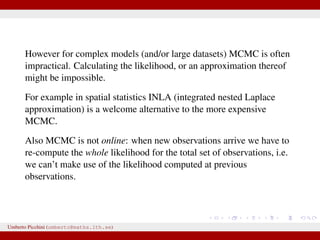
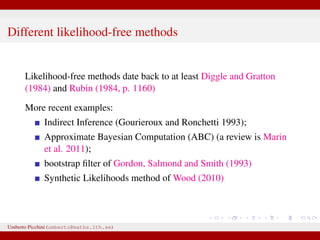
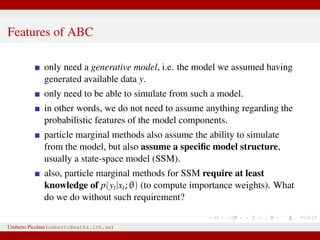
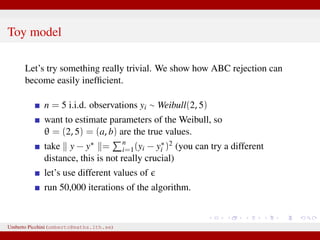
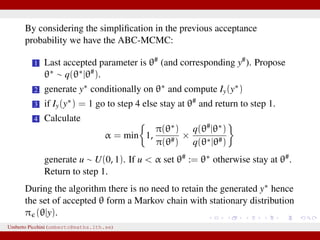
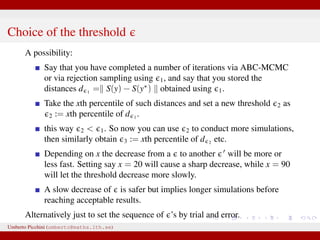
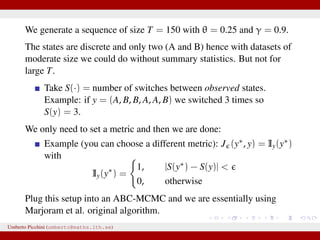
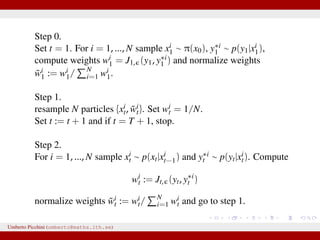
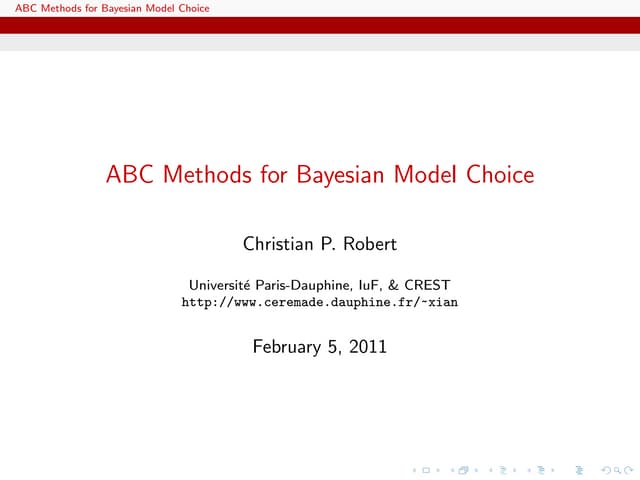
![Step 5: The posterior distribution is approximated with the
accepted parameter points. The posterior distribution should have
a nonnegligible probability for parameter values in a region
This example application of ABC used simplifications for
illustrative purposes. A number of review articles provide pointers
to more realistic applications of ABC [9–11,14].
Figure 1. Parameter estimation by Approximate Bayesian Computation: a conceptual overview.
doi:10.1371/journal.pcbi.1002803.g001
Umberto Picchini (umberto@maths.lth.se)](https://image.slidesharecdn.com/abcslides-160217212955/85/Intro-to-Approximate-Bayesian-Computation-ABC-20-320.jpg)
![Example from Sunnåker et al. 2013
[Large chunks from the cited article constitute the ABC entry in Wikipedia.]
distribution for these models. Again, computational improvements
for ABC in the space of models have been proposed, such as
constructing a particle filter in the joint space of models and
parameters [17].
Once the posterior probabilities of models have been estimated,
one can make full use of the techniques of Bayesian model
comparison. For instance, to compare the relative plausibilities of
two models M1 and M2, one can compute their posterior ratio,
which is related to the Bayes factor B1,2:
p(M1DD) p(DDM1) p(M1) p(M1)
additional bias due to the loss of information
bias—for example, in the context of mod
more subtle [12,18].
At the same time, some of the criticisms t
at the ABC methods, in particular
phylogeography [19–21], are not specific
all Bayesian methods or even all statistic
choice of prior distribution and param
However, because of the ability of ABC-me
more complex models, some of these g
particular relevance in the context of ABC
This section discusses these potential risk
ways to address them (Table 2).
Approximation of the Posterior
A nonnegligible e comes with the price
p(hDr(^DD,D)ƒe) instead of the true post
sufficiently small tolerance, and a sensible
resulting distribution p(hDr(^DD,D)ƒe) shou
the actual target distribution p(hDD) reasona
hand, a tolerance that is large enough th
parameter space becomes accepted will yiel
distribution. There are empirical studies of
p(hDr(^DD,D)ƒe) and p(hDD) as a function of
results for an upper e-dependent bound for
estimates [24]. The accuracy of the pos
expected quadratic loss) delivered by ABC
also been investigated [25]. However, th
distributions when e approaches zero, and
distance measure used, is an important to
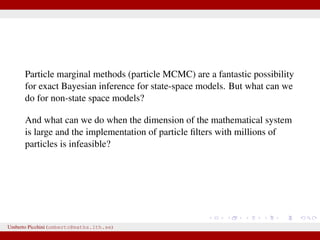
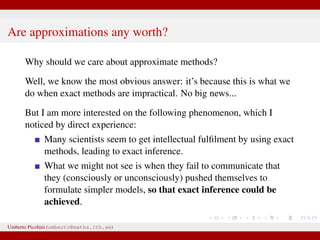
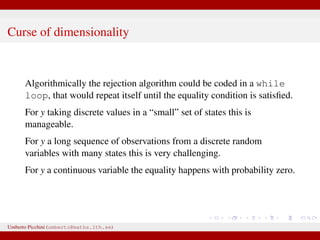
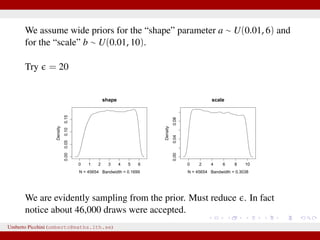
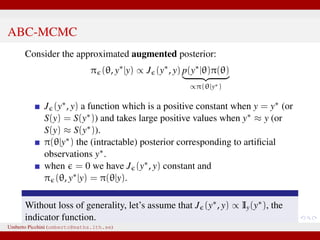
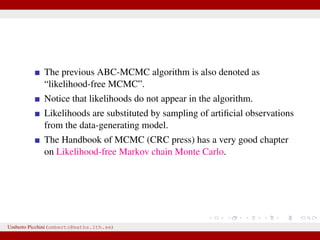
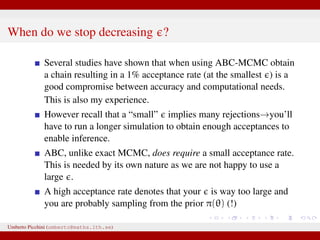
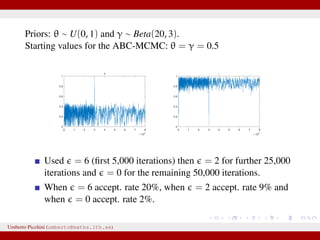
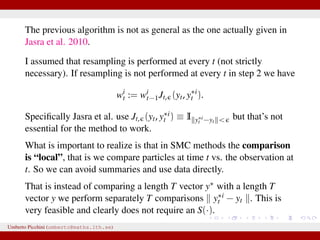
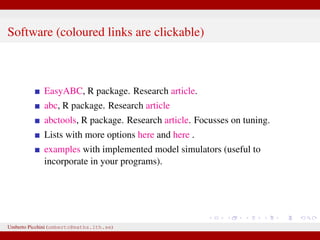
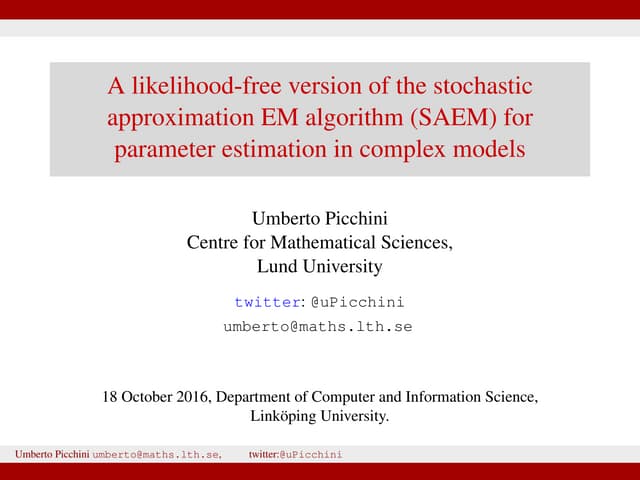
Figure 2. A dynamic bistable hidden Markov model.
doi:10.1371/journal.pcbi.1002803.g002
We have a hidden system state, moving between states {A,B} with
probability θ, and stays in the current state with probability 1 − θ.
Actual observations affected by measurement errors: probability to
misread system states is 1 − γ for both A and B.
Umberto Picchini (umberto@maths.lth.se)](https://image.slidesharecdn.com/abcslides-160217212955/85/Intro-to-Approximate-Bayesian-Computation-ABC-44-320.jpg)
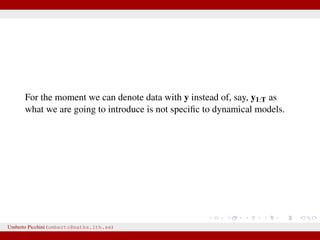
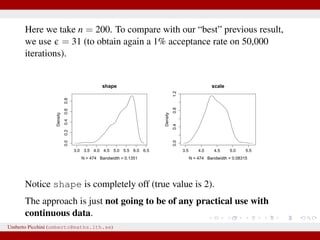
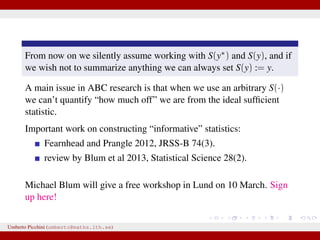
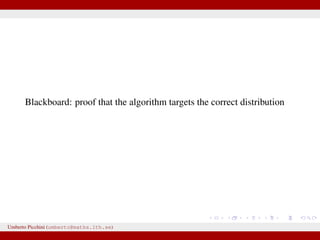
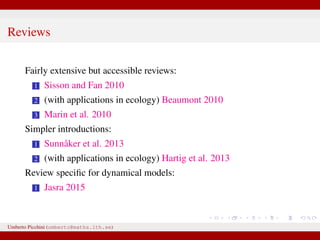
![Results at = 0
Dealing with a discrete state-space model allows the luxury to obtain
results at = 0 (impossible with continuous states).
Below: ABC posteriors (blue), true parameters (vertical red lines) and
Beta prior (black). For θ we used a uniform prior in [0,1].
0 0.2 0.4 0.6 0.8 1
0
1
2
3
4
5
θ
0 0.2 0.4 0.6 0.8 1 1.2
0
1
2
3
4
5
6
7
γ
Remember: when using non-sufficient statistics results will be
biased even with = 0.
Umberto Picchini (umberto@maths.lth.se)](https://image.slidesharecdn.com/abcslides-160217212955/85/Intro-to-Approximate-Bayesian-Computation-ABC-49-320.jpg)
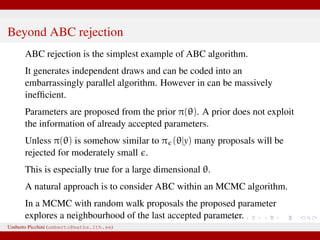
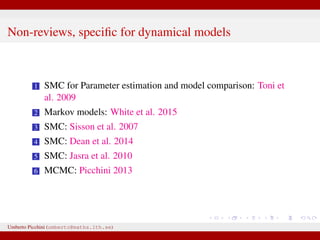
![So Fearnhead & Prangle propose a regression-based approach to
determine S(·) (prior to ABC-MCMC start):
for the jth parameter in θ fit separately the linear regression
models
Sj(y) = ˆE(θj|y) = ˆβ
(j)
0 + ˆβ(j)
η(y), j = 1, 2, ..., dim(θ)
[e.g. Sj(y) = ˆβ
(j)
0 + ˆβ(j)η(y) = ˆβ
(j)
0 + ˆβ
(j)
1 y0 + · · · + ˆβ
(j)
n yn or
you can let η(·) contain powers of y, say η(y, y2, y3, ...)]
repeat the fitting separately for each θj.
hopefully Sj(y) = ˆβ
(j)
0 + ˆβ(j)η(y) will be “informative” for θj.
Clearly, in the end we have as many summaries as the number of
unknown parameters dim(θ).
Umberto Picchini (umberto@maths.lth.se)](https://image.slidesharecdn.com/abcslides-160217212955/85/Intro-to-Approximate-Bayesian-Computation-ABC-61-320.jpg)

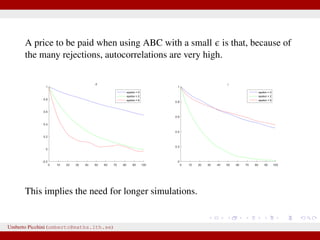
The document discusses the challenges and methodologies related to approximate Bayesian computation (ABC) for statistical inference, particularly when exact inference is impractical due to complex models or large datasets. It emphasizes the likelihood-free approach, where simulations from complex stochastic processes are used to estimate model parameters when traditional likelihood calculations are infeasible. Key concepts include the curse of dimensionality, the rejection sampling method, and the importance of formulating appropriate models to derive useful approximations.
![[기초개념] Graph Convolutional Network (GCN)](https://cdn.slidesharecdn.com/ss_thumbnails/agistdkimgcn190507-190507153736-thumbnail.jpg?width=640&height=640&fit=bounds)

































![[A]BCel : a presentation at ABC in Roma](https://cdn.slidesharecdn.com/ss_thumbnails/abcel-130530042650-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)














![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)
















