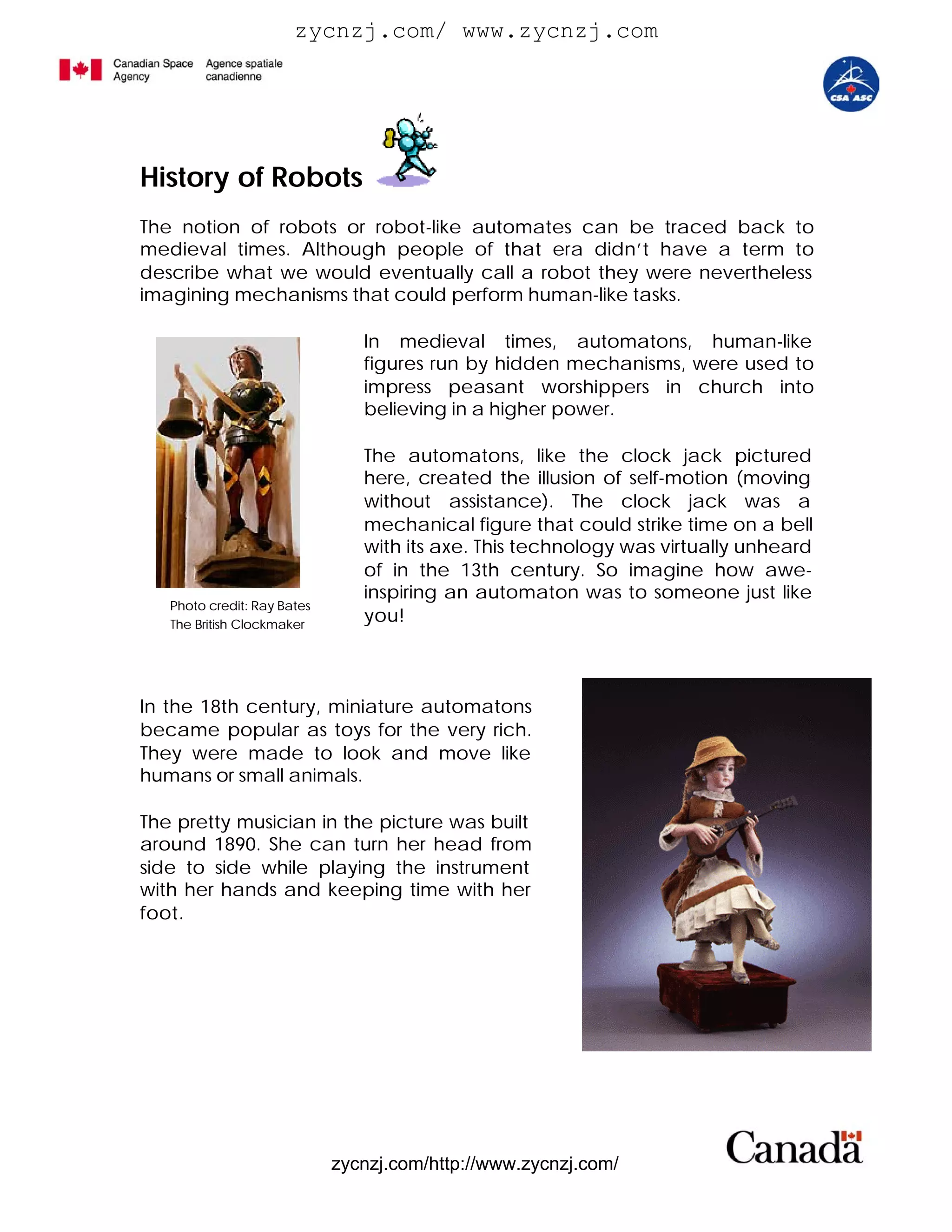
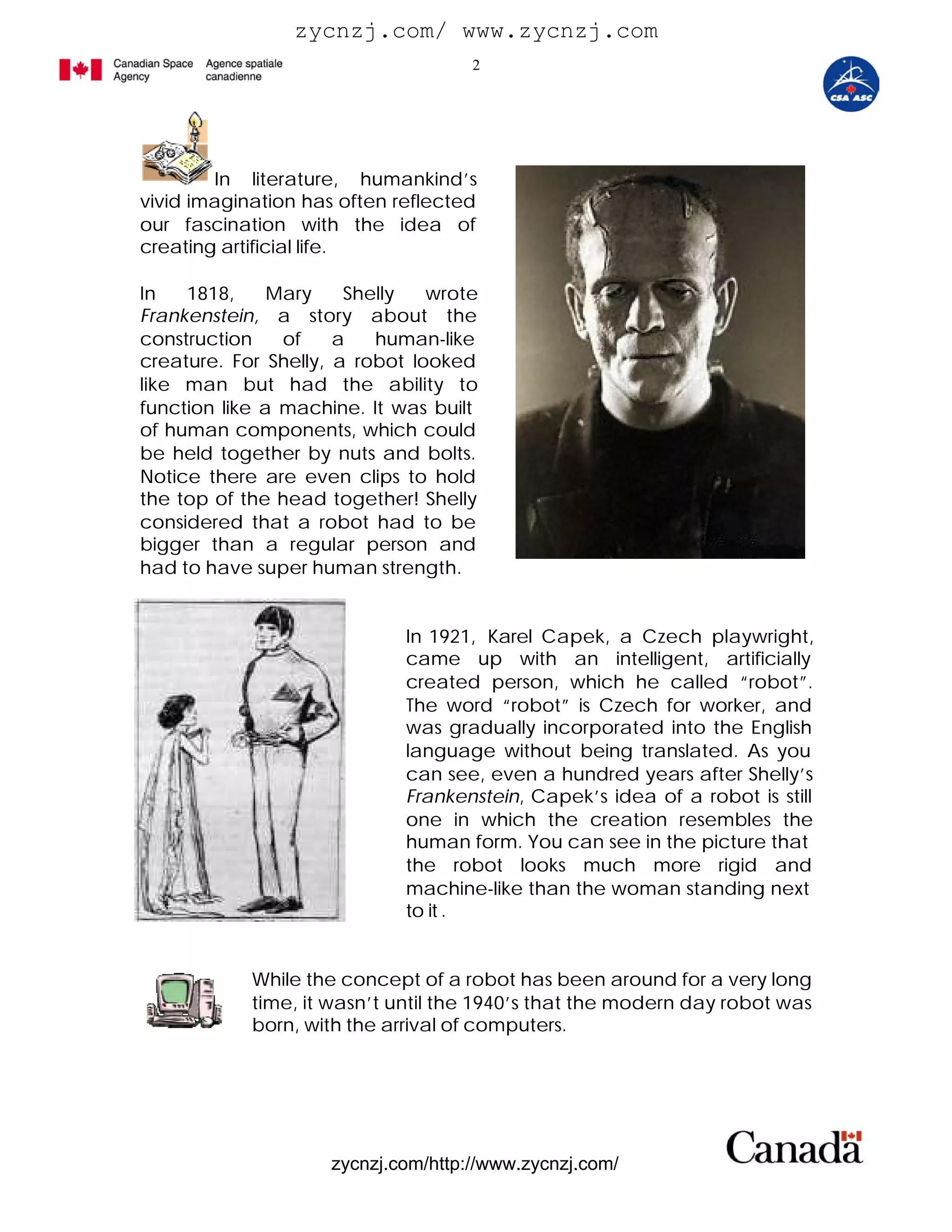
The document provides a history of robots from medieval times to modern times. It discusses how early automatons were used in churches to impress worshippers and how 18th century miniature automatons became popular toys for the rich. It then outlines how the term "robot" was coined in 1921 and how industrial robots were employed in factories starting in the 1940s. The document concludes by describing how robots are used in space to perform dangerous tasks and maintain the International Space Station.




























![history_of_robotics_[autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/historyofroboticsautosaved-230213204848-573177a2-thumbnail.jpg?width=640&height=640&fit=bounds)











![[IJET - V1I1P1] Author :Husssain Babu, Mohammad Ali](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i1p1-150213030225-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)