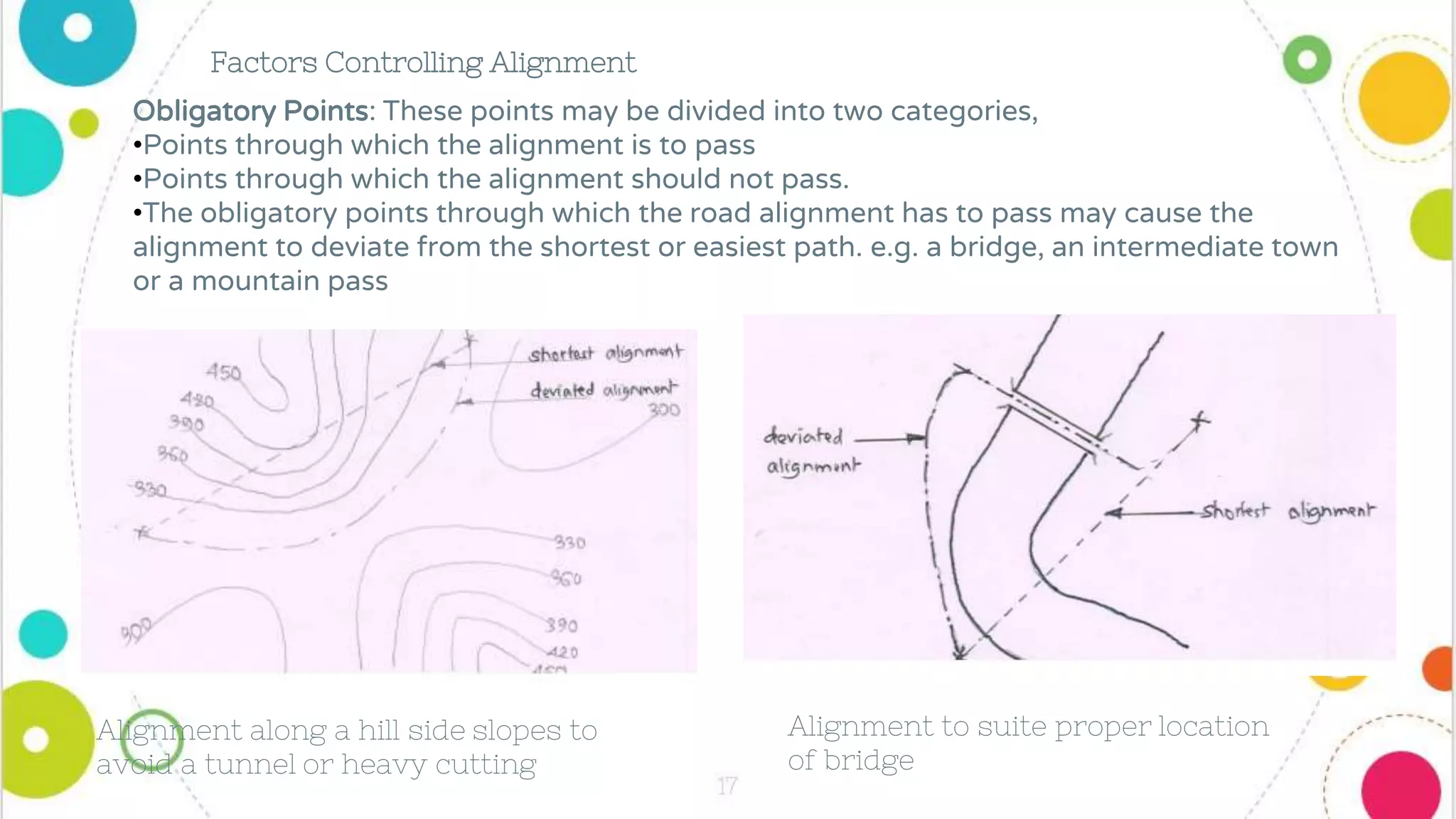
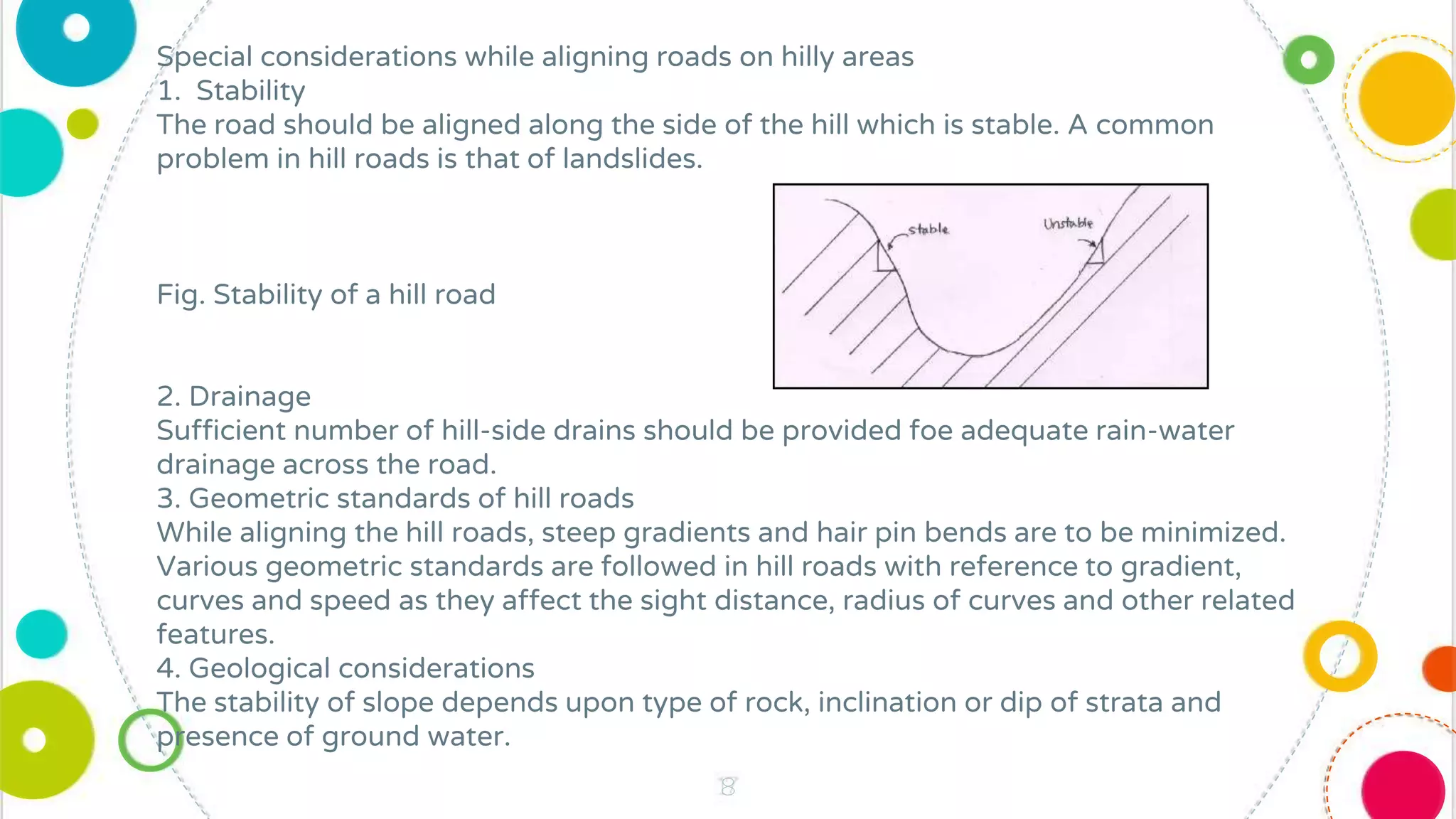
The document discusses highway geometric design, focusing on the alignment, horizontal and vertical curves, and intersections to enhance road safety and economy. It emphasizes the importance of proper alignment influenced by topography, traffic characteristics, and cost-effectiveness. Central concepts include the design of horizontal alignment through curves, superelevation to counteract centrifugal force, and the need for optimal geometric features to ensure comfortable and safe vehicle movement.