The document describes a two-wheeled self-balancing robot project created by three students. It has two modes: balancing mode, where it automatically balances itself, and Bluetooth mode, where it can be controlled remotely via an Android phone. The robot was designed to be affordable and help disabled individuals, and incorporates a gyroscope, sensors, and an Arduino controller. The students faced challenges but created a functional prototype and discuss potential applications and future improvements.
![TWO-WHEELED SELF BALANCING ROBOT
Kaustav Chakraborty | 14BME0921| Abhijeet Thakur | 14BME0717 | Ashish Chauhan | 14BME0554
Prof. Sreethul Das | SMEC
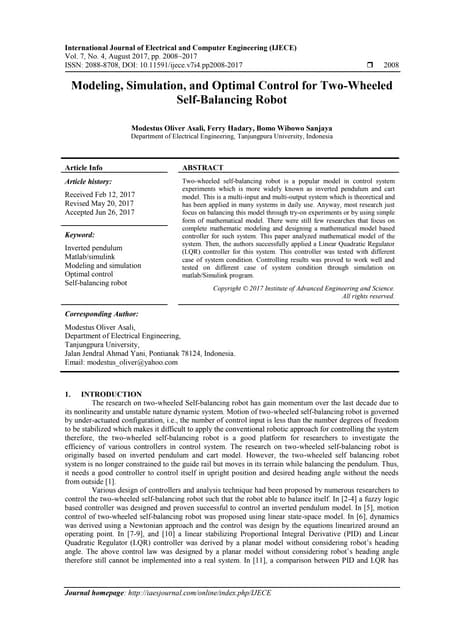
The final model had a lot of changes involved to make it more realistic and
practical. We have successfully incorporated two modes of our bot as per
follows
Ø The Balancing Mode: In this mode the Bot automatically balances itself
about its Y-axis. It emphasises the property of an autonomous system. As
soon as it tilts forward the wheels are made to go in forward direction and
vice versa
Ø The Bluetooth Mode: In this mode the Bot is controlled remotely by using
the Bluetooth connectivity of an Android based cell phone. On the press of a
button in the mobile interface the robot moves either forward ,backward or
rotates about its z axis
Final Cost Sheet
Scope of the Project
Results
Methodology
The aim of this project is to build a mobile platform primarily for physically
disabled person, keeping in mind their constraints. It is being achieved by
building a two-wheeled balancing vehicle, which can intuitively be driven by
tilting the body in the desired directions of travel. There are similar commercial
products existing but they have not been able to penetrate Indian market
due to various reasons. One such example, Segway, the two-wheeled personal
mobile vehicle, was not successful in India due to its high cost.
Other purpose could be to access a hazardous or confined environment which
would be difficult to manoeuvre around for a track or multi-wheeled vehicle.
This is easily achieved by a two wheel robot as it can turn on the spot by rotating
the right wheel forward whilst the left rotates backward and vice versa.
Two wheeled balancing robots are an area of research that may well provide the
future locomotion for everyday robots. Completing the design and development
phase of the robot requires careful consideration of all aspects including
operating conditions, materials, hardware and software. The construction phase
entails the manufacture and assembly of the gyroscope, hardware and chassis
with the software and programming aspects then implemented. The structural,
mechanical, and electronic components of the robot will be assembled in a
manner that produces an inherently unstable platform that is highly susceptible
to tipping in one axis. The components are chosen in such a manner which
makes it a feasible option to construct the robot in a cost effective manner.
Introduction
References
• Anderson, D.P, (7th August 2003) nbot, a two wheel balancing robot
[Online],
• Nakajima, Ryo, Takashi Tsubouchi, Shin’ichi Yuta & Eiji Koyanagi. 1997 ‘A
Development of a New Mechanism of an Autonomous Unicycle’, IEEE
International Conference on Intelligent Robots and Systems, v 2, pp 906-
912.
• Miller(October, 2008), Building a Two Wheeled Balancing Robot,
University of Southern Queensland Faculty of Engineering and Surveying .
Conclusion
Contact Details
abhijeet.thakur2014@vit.ac.in | kaustav.chakra2014@vit.ac.in | vashish.chauhan2014@vit.ac.in
Design
Primary motive was to balance the robot using mechanical gyroscope
techniques. However, even though the manufacturing was possible the actual
proved to be a much tedious and difficult task. Thus, we shifted our design
using a gyroscope chip(model no: ADXL335).
Theory
Ø Gyroscope- A Gyroscope is a spinning wheel or disc in which the axis of
rotation is free to assume any orientation by itself. When rotating, the
orientation of this axis is unaffected by tilting or rotation of the mounting,
according to the conservation of angular momentum. Because of this,
gyroscopes are useful for measuring or maintaining orientation.
ØSensors- In order to achieve the Iot technology we have implemented HC05
Bluetooth module which has the capability of wireless transfer of control to the
drive wheels. We have also used a state of the art motor driver AL293D which
implements a H-bridge.
ØChassis- The chassis is fabricated using commercially available acrylic sheets
cut by angle cutter having Al2O3 as abrasive. For sticking purpose we use hot
melt adhesive (HMA) based glue guns. The process of making chassis involved a
bending procedure which was achieved using a hot torch of a rework station.
ØController- Arduino Uno was deemed to be the best fit controller for our
project since it is cheap and easy to program.
•Even though we were faced with a lot of hurdles a presentable version of
our initial concept has been successfully manufactured.
•Further research will be required and better algorithms can be formulated
to obtain a more precise and effective balancing motion.
•The current model can be implemented in remote controlled mobile
vehicles for challenged people.
•This technology can further be extended for aeronautical applications and
also for reconnaissance activities since it requires a much reduced
workspace.
Initial CAD Design
SL.NO COMPONENTS QUANTITY
COST PER
UNIT(Rs.)
TOTAL
COST(Rs.)
1. Chassis(acrylic sheet) 1 110 110
2. Motor(dc 12v) 1 250 250
3. BO geared DC motor 12V(150 RPM) 2 300 600
4. Wheels 2 30 60
5. Glue gun 1 250 250
6. L-hinges 2 10 20
7. Battery(9v) 2 20 40
8. Sensors and Electronic components 4Units - 1000
9. Shaft 1 30 20
10. Arduino 1 550 450
TOTAL 2800
10TH-31ST JAN 1ST-15TH FEB 16TH-28TH FEB 1ST-15TH MAR 16TH-31ST MAR 1ST-20TH APR
DESIGN PHASE
EXPERIMENTAL PHASE
MANUFACTURING PHASE](https://image.slidesharecdn.com/posterformat-hardwareproject-191110164919/85/Hardware-Project-1-320.jpg)
![TWO-WHEELED SELF BALANCING ROBOT
Kaustav Chakraborty | 14BME0921| Abhijeet Thakur | 14BME0717 | Ashish Chauhan | 14BME0554
Prof. Sreethul Das | SMEC
The final model had a lot of changes involved to make it more realistic and
practical. We have successfully incorporated two modes of our bot as per
follows
Ø The Balancing Mode: In this mode the Bot automatically balances itself
about its Y-axis. It emphasises the property of an autonomous system. As
soon as it tilts forward the wheels are made to go in forward direction and
vice versa
Ø The Bluetooth Mode: In this mode the Bot is controlled remotely by using
the Bluetooth connectivity of an Android based cell phone. On the press of a
button in the mobile interface the robot moves either forward ,backward or
rotates about its z axis
Final Cost Sheet
Scope of the Project
Results
Methodology
The aim of this project is to build a mobile platform primarily for physically
disabled person, keeping in mind their constraints. It is being achieved by
building a two-wheeled balancing vehicle, which can intuitively be driven by
tilting the body in the desired directions of travel. There are similar commercial
products existing but they have not been able to penetrate Indian market
due to various reasons. One such example, Segway, the two-wheeled personal
mobile vehicle, was not successful in India due to its high cost.
Other purpose could be to access a hazardous or confined environment which
would be difficult to manoeuvre around for a track or multi-wheeled vehicle.
This is easily achieved by a two wheel robot as it can turn on the spot by rotating
the right wheel forward whilst the left rotates backward and vice versa.
Two wheeled balancing robots are an area of research that may well provide the
future locomotion for everyday robots. Completing the design and development
phase of the robot requires careful consideration of all aspects including
operating conditions, materials, hardware and software. The construction phase
entails the manufacture and assembly of the gyroscope, hardware and chassis
with the software and programming aspects then implemented. The structural,
mechanical, and electronic components of the robot will be assembled in a
manner that produces an inherently unstable platform that is highly susceptible
to tipping in one axis. The components are chosen in such a manner which
makes it a feasible option to construct the robot in a cost effective manner.
Introduction
References
• Anderson, D.P, (7th August 2003) nbot, a two wheel balancing robot
[Online],
• Nakajima, Ryo, Takashi Tsubouchi, Shin’ichi Yuta & Eiji Koyanagi. 1997 ‘A
Development of a New Mechanism of an Autonomous Unicycle’, IEEE
International Conference on Intelligent Robots and Systems, v 2, pp 906-
912.
• Miller(October, 2008), Building a Two Wheeled Balancing Robot,
University of Southern Queensland Faculty of Engineering and Surveying .
Conclusion
Contact Details
abhijeet.thakur2014@vit.ac.in | kaustav.chakra2014@vit.ac.in | vashish.chauhan2014@vit.ac.in
Design
Primary motive was to balance the robot using mechanical gyroscope
techniques. However, even though the manufacturing was possible the actual
proved to be a much tedious and difficult task. Thus, we shifted our design
using a gyroscope chip(model no: ADXL335).
Theory
Ø Gyroscope- A Gyroscope is a spinning wheel or disc in which the axis of
rotation is free to assume any orientation by itself. When rotating, the
orientation of this axis is unaffected by tilting or rotation of the mounting,
according to the conservation of angular momentum. Because of this,
gyroscopes are useful for measuring or maintaining orientation.
ØSensors- In order to achieve the Iot technology we have implemented HC05
Bluetooth module which has the capability of wireless transfer of control to the
drive wheels. We have also used a state of the art motor driver AL293D which
implements a H-bridge.
ØChassis- The chassis is fabricated using commercially available acrylic sheets
cut by angle cutter having Al2O3 as abrasive. For sticking purpose we use hot
melt adhesive (HMA) based glue guns. The process of making chassis involved a
bending procedure which was achieved using a hot torch of a rework station.
ØController- Arduino Uno was deemed to be the best fit controller for our
project since it is cheap and easy to program.
•Even though we were faced with a lot of hurdles a presentable version of
our initial concept has been successfully manufactured.
•Further research will be required and better algorithms can be formulated
to obtain a more precise and effective balancing motion.
•The current model can be implemented in remote controlled mobile
vehicles for challenged people.
•This technology can further be extended for aeronautical applications and
also for reconnaissance activities since it requires a much reduced
workspace.
Initial CAD Design
SL.NO COMPONENTS QUANTITY
COST PER
UNIT(Rs.)
TOTAL
COST(Rs.)
1. Chassis(acrylic sheet) 1 110 110
2. Motor(dc 12v) 1 250 250
3. BO geared DC motor 12V(150 RPM) 2 300 600
4. Wheels 2 30 60
5. Glue gun 1 250 250
6. L-hinges 2 10 20
7. Battery(9v) 2 20 40
8. Sensors and Electronic components 4Units - 1000
9. Shaft 1 30 20
10. Arduino 1 550 450
TOTAL 2800
10TH-31ST JAN 1ST-15TH FEB 16TH-28TH FEB 1ST-15TH MAR 16TH-31ST MAR 1ST-20TH APR
DESIGN PHASE
EXPERIMENTAL PHASE
MANUFACTURING PHASE](https://image.slidesharecdn.com/posterformat-hardwareproject-191110164919/75/Hardware-Project-1-2048.jpg)