NVIDIA GTC Taiwan2017
結合智能視覺系統之機械手臂
達明機器人 黃鐘賢(David)
2017/10/26
A leading company in
collaborative robot and vision technologies.
TECHMAN ROBOT INC.
2.
Confidential
Outline
n 達明機器人簡介 –Smart, Simple and Safe
n Be Smart at Edge – 手眼力協調之機械手臂
n Be Smart among Robots – 多手臂協作
n Be Smart at Cloud – 智慧工廠
n Be Smart in the Future – 基於深度學習之手臂應用
2
3.
Confidential
Outline
n 達明機器人簡介 –Smart, Simple and Safe
n Be Smart at Edge – 手眼力協調之機械手臂
n Be Smart among Robots – 多手臂協作
n Be Smart at Cloud – 智慧工廠
n Be Smart in the Future – 基於深度學習之手臂應用
3
Confidential
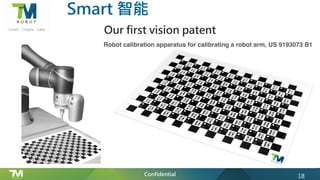
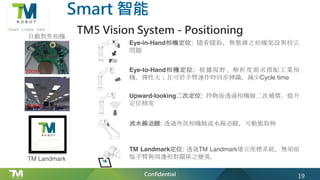
Smart 智能
TM5 VisionSystem
n 內置視覺系統,無須擔心如何整合複雜
的視覺組件
n 自動矯正視覺系統的參數
n 物件偵測、影像增強、條碼讀取
n 使用簡易的用戶介面實現自動化任務
n 核心辨識與定位模組透過GPU加速
n 基於深度學習之文字辨識模組(OCR)
17
Confidential
Outline
n 達明機器人簡介 –Smart, Simple and Safe
n Be Smart at Edge – 手眼力協調之機械手臂
n Be Smart among Robots – 多手臂協作
n Be Smart at Cloud – 智慧工廠
n Be Smart in the Future – 基於深度學習之手臂應用
23
24.
Confidential
Be Smart atEdge – 手眼力協調之機械手臂
24
Intruder detection is running
on GPU with 30 frames/s
25.
Confidential
Outline
n 達明機器人簡介 –Smart, Simple and Safe
n Be Smart at Edge – 手眼力協調之機械手臂
n Be Smart among Robots – 多手臂協作
n Be Smart at Cloud – 智慧工廠
n Be Smart in the Future – 基於深度學習之手臂應用
25
Confidential
Outline
n 達明機器人簡介 –Smart, Simple and Safe
n Be Smart at Edge – 手眼力協調之機械手臂
n Be Smart among Robots – 多手臂協作
n Be Smart at Cloud – 智慧工廠
n Be Smart in the Future – 基於深度學習之手臂應用
27
Confidential
Outline
n 達明機器人簡介 –Smart, Simple and Safe
n Be Smart at Edge – 手眼力協調之機械手臂
n Be Smart among Robots – 多手臂協作
n Be Smart at Cloud – 智慧工廠
n Be Smart in the Future – 基於深度學習之手臂應用
29
30.
Confidential
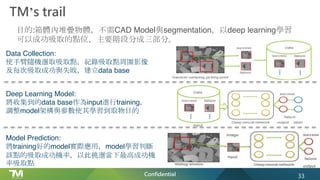
AI is coming!
類別公司 視覺技術擴展至深度學習的導入
併購or投資合作的對象 內部研發
機器視覺
(Machine Vision)
Cognex ViDi
Halcon In-House R&D
(2016導入深度學習OCR)
工業機器人
(Robotics)
Fanuc Preferred Network
ABB Vicarious
Kuka Huawei
台灣廠商
(TAIROS 2017)
所羅門 In-House R&D
(Inspection, Bin Picking)
台達 In-House R&D
(Inspection)
n Cognex收購機器視覺深度學習公司ViDi (2017/04)
n Fanuc投資深度學習技術開發公司Preferred Network (PFN)
n ABB投資AI新創公司Vicarious
n Kuka與華為展開深度學習合作
30
31.
Confidential
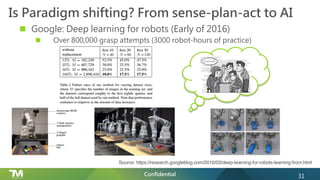
Is Paradigm shifting?From sense-plan-act to AI
n Google: Deep learning for robots (Early of 2016)
n Over 800,000 grasp attempts (3000 robot-hours of practice)
31
Source: https://research.googleblog.com/2016/03/deep-learning-for-robots-learning-from.html
Confidential
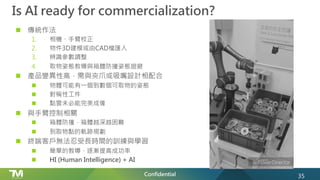
Is AI readyfor commercialization?
n 傳統作法
1. 相機、手臂校正
2. 物件3D建模或由CAD檔匯入
3. 辨識參數調整
4. 取物姿態教導與箱體防撞姿態迴避
n 產品變異性高,需與夾爪或吸嘴設計相配合
n 物體可能有一個到數個可取物的姿態
n 對稱性工件
n 點雲未必能完美成像
n 與手臂控制相關
n 箱體防撞,箱體越深越困難
n 到取物點的軌跡規劃
n 終端客戶無法忍受長時間的訓練與學習
n 簡單的教導、逐漸提高成功率
n HI (Human Intelligence) + AI
35
36.
Confidential
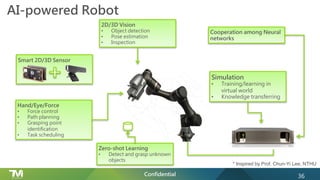
Smart 2D/3D Sensor
AI-poweredRobot
2D/3D Vision
• Object detection
• Pose estimation
• Inspection
Hand/Eye/Force
• Force control
• Path planning
• Grasping point
identification
• Task scheduling
Zero-shot Learning
• Detect and grasp unknown
objects
Simulation
• Training/learning in
virtual world
• Knowledge transferring
Cooperation among Neural
networks
36
* Inspired by Prof. Chun-Yi Lee, NTHU








































![[DL輪読会]Understanding Black-box Predictions via Influence Functions](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacksinffunc-170822055634-thumbnail.jpg?width=640&height=640&fit=bounds)










































