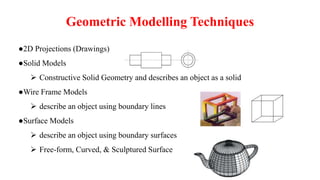
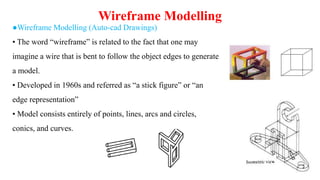
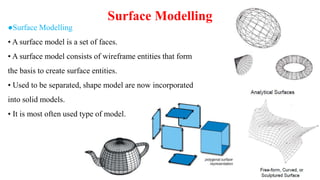
This document discusses different techniques for geometric modelling. It describes wireframe modelling as using points, lines, arcs and curves to represent an object. Surface modelling uses faces defined by wireframes to represent surfaces. Solid modelling defines objects by their enclosed volume using half-spaces. The document provides examples of how varying parameters like radius, angle, and height in equations can represent different geometric objects like circles, cylinders, disks, and solid or hollow cylinders.










































![Solids[1]](https://cdn.slidesharecdn.com/ss_thumbnails/solids1-150926053431-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)