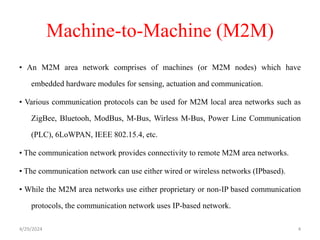
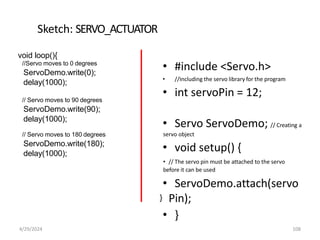
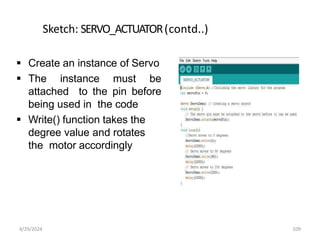
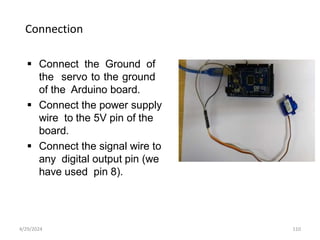
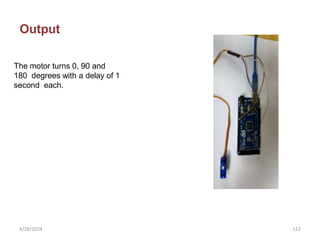
The document outlines the fundamentals of IoT and M2M communication, detailing the networking of machines for remote monitoring and control, as well as various communication protocols. It highlights differences between M2M and IoT in terms of hardware emphasis, data collection, and interoperability, advocating for seamless communication among diverse devices and platforms. Additionally, it introduces Arduino programming basics, focusing on microcontroller types, setup, and programming to create interactive projects.
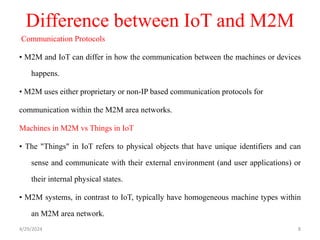

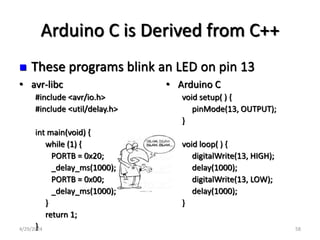
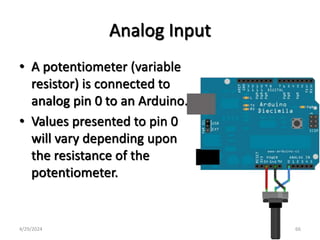

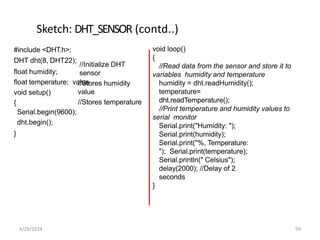
![Arrays
Collection of elements having homogenous datatype
that are stored in adjacent memory location.
The conventional starting index is 0.
Declaration of array:
<Datatype>
array_name[size];
Ex: int arre[5];
4/29/2024 76](https://image.slidesharecdn.com/fiotunit21-240429173719-a7720c6f/85/FIOT_Unit_2-1-softwaredefinedradio-pptx-75-320.jpg)
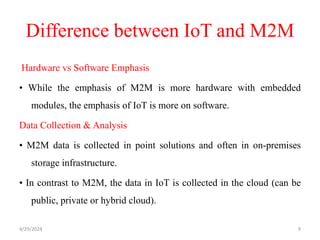
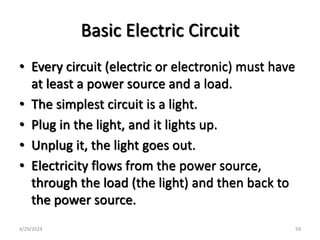
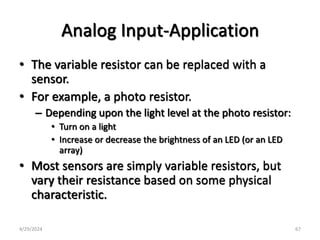
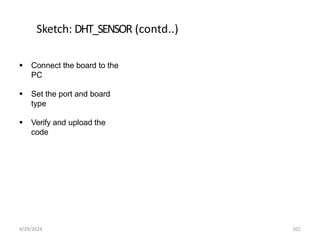
![Arrays (contd..)
Alternative Declaration:
int arre[]={0,1,2,3,4};
int arre[5]={0,1,2};
Multi-dimentional array Declaration:
<Datatype> array_name[n1] [n2][n3]….;
Ex: int arre[row][col][height];
4/29/2024 77](https://image.slidesharecdn.com/fiotunit21-240429173719-a7720c6f/85/FIOT_Unit_2-1-softwaredefinedradio-pptx-76-320.jpg)
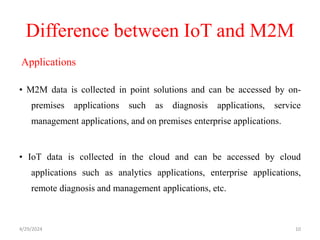
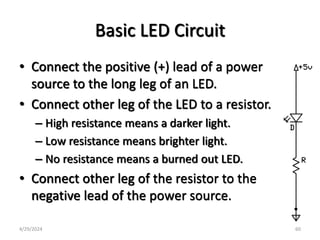
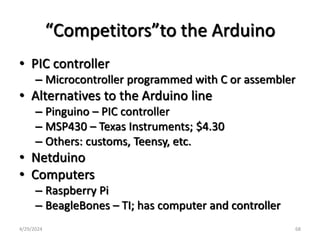
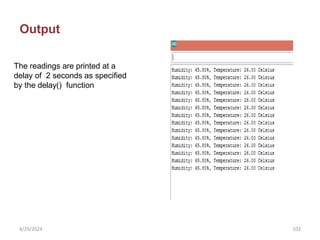
![String
Array of characters with NULL as termination is termed as a
String.
Declaration using Array:
char str[]=“ABCD”;
char str[4];
str[0]=‘A’;
str[1]=‘B’;
str[2]=‘C’;
str[3]=D;
Declaration using String Object:
String str=“ABC”;
4/29/2024 78](https://image.slidesharecdn.com/fiotunit21-240429173719-a7720c6f/85/FIOT_Unit_2-1-softwaredefinedradio-pptx-77-320.jpg)
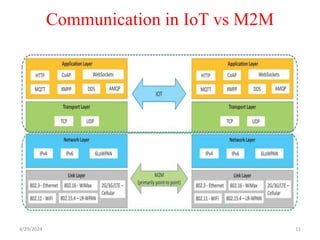
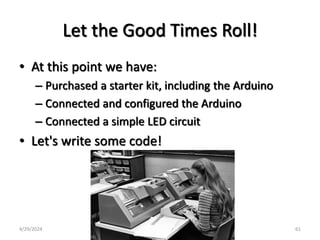
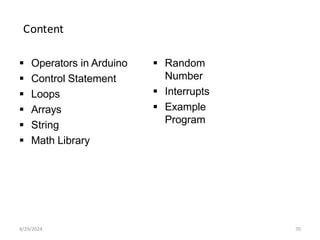
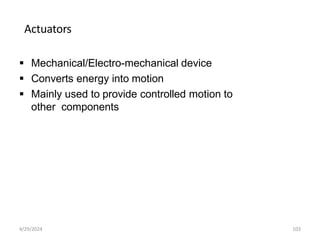
![Random Number
randomSeed(int v): reset the pseudo-random number
generator with seed value v
random(maxi)=gives a random number within the range
[0,maxi]
r
n
a
i
,
n
m
d
a
o
x
m
i(mini )=gives a random number within the
range [mini,maxi]
4/29/2024 82](https://image.slidesharecdn.com/fiotunit21-240429173719-a7720c6f/85/FIOT_Unit_2-1-softwaredefinedradio-pptx-81-320.jpg)



















![[PPT] _ Unit 2 _ Complete PPT.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptunit2completeppt-220516115836-332a1107-thumbnail.jpg?width=640&height=640&fit=bounds)




































