Download as PDF, PPTX
![3
IBM Software Group
© 2009 IBM Corporation
Modeling
Language
[1,2]
IBM ILOG CP Optimizer for Detailed Scheduling
[1] Reasoning with Conditional Time-intervals. FLAIRS-08.
[2] Reasoning with Conditional Time-intervals, Part II: an Algebraical Model for Resources. FLAIRS-09.
• Extension of classical CSP with a new type of decision variable:
optional interval variable :
Domain(a) {} { [s,e) | s,e, s≤e }
• Introduction of mathematical notions such as sequences and functions to
capture temporal aspects of scheduling problems
Absent interval Interval of integers](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-3-320.jpg)
![4
IBM Software Group
© 2009 IBM Corporation
Automatic
Search
[3,4]
IBM ILOG CP Optimizer for Detailed Scheduling
[3] Randomized Large Neighborhood Search for Cumulative Scheduling. ICAPS-05.
[4] Self-Adapting Large Neighborhood Search: Application to Single-mode Scheduling Problems. MISTA-07.
POS generation
Fragment
Selection
- Problem structure
- Randomization
Tree search
- LP relaxation
- Propagation
- Dominance rules
Continue
search ?
Problem
Machine
Learning
Techniques
[1] Reasoning with Conditional Time-intervals. FLAIRS-08.
[2] Reasoning with Conditional Time-intervals, Part II: an Algebraical Model for Resources. FLAIRS-09.
Self-Adapting
Large Neighborhood
Search](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-4-320.jpg)
![5
IBM Software Group
© 2009 IBM Corporation
IBM ILOG CP Optimizer for Detailed Scheduling
Modeling
Language
[1,2]
Automatic
Search
[3,4]
Efficient
search
Easy
modeling
[3] Randomized Large Neighborhood Search for Cumulative Scheduling. ICAPS-05.
[4] Self-Adapting Large Neighborhood Search: Application to Single-mode Scheduling Problems. MISTA-07.
[1] Reasoning with Conditional Time-intervals. FLAIRS-08.
[2] Reasoning with Conditional Time-intervals, Part II: an Algebraical Model for Resources. FLAIRS-09.](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-5-320.jpg)
![6
IBM Software Group
© 2009 IBM Corporation
IBM ILOG CP Optimizer for Detailed Scheduling
Modeling
Language
[1,2]
Automatic
Search
[3,4]
Efficient
search
Easy
modeling
Detailed Scheduling
Problems
[3] Randomized Large Neighborhood Search for Cumulative Scheduling. ICAPS-05.
[4] Self-Adapting Large Neighborhood Search: Application to Single-mode Scheduling Problems. MISTA-07.
[1] Reasoning with Conditional Time-intervals. FLAIRS-08.
[2] Reasoning with Conditional Time-intervals, Part II: an Algebraical Model for Resources. FLAIRS-09.](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-6-320.jpg)
![7
IBM Software Group
© 2009 IBM Corporation
IBM ILOG CP Optimizer for Detailed Scheduling
Modeling
Language
[1,2]
Automatic
Search
[3,4]
Efficient
search
Easy
modeling
[3] Randomized Large Neighborhood Search for Cumulative Scheduling. ICAPS-05.
[4] Self-Adapting Large Neighborhood Search: Application to Single-mode Scheduling Problems. MISTA-07.
[1] Reasoning with Conditional Time-intervals. FLAIRS-08.
[2] Reasoning with Conditional Time-intervals, Part II: an Algebraical Model for Resources. FLAIRS-09.
Resource-Constrained
Project Scheduling
Problems](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-7-320.jpg)
![12
IBM Software Group
© 2009 IBM Corporation
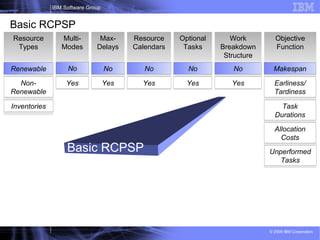
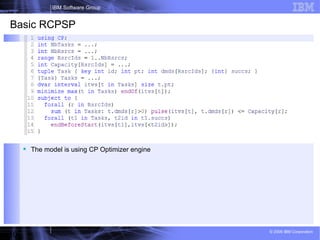
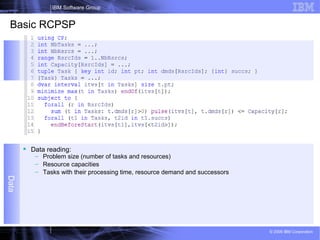
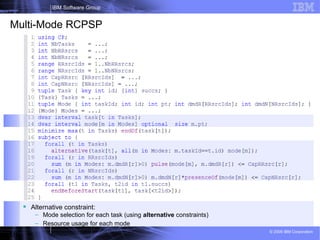
Basic RCPSP
Decisions
Decision variables:
– Tasks: array of interval variables
itvs[t]
t.pt](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-12-320.jpg)
![13
IBM Software Group
© 2009 IBM Corporation
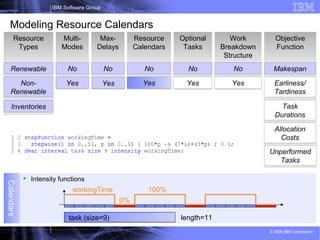
Basic RCPSP
Objective
Objective:
– Minimize project makespan
itvs[t1]
itvs[t2]
itvs[tn]
max(t in Tasks) endOf(itvs[t])](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-13-320.jpg)
![14
IBM Software Group
© 2009 IBM Corporation
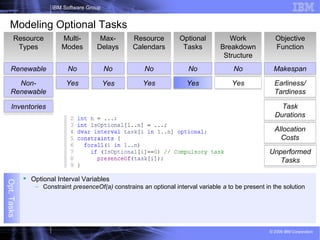
Basic RCPSP
Constraints
Constraints:
– Resource capacity constraints (using cumul functions)
itvs[t]
t.dmds[r] pulse
itvs[t1]itvs[t2]
itvs[tn]
pulse
Capacity[r]](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-14-320.jpg)
![15
IBM Software Group
© 2009 IBM Corporation
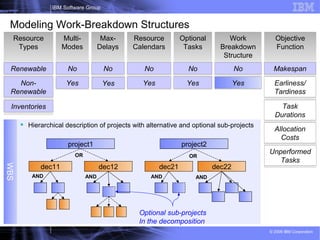
Basic RCPSP
Constraints
Constraints:
– Precedence constraints between tasks
itvs[t1]
itvs[t2]
itvs[tn]](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-15-320.jpg)
![19
IBM Software Group
© 2009 IBM Corporation
Inventories
Cumul functions with stepAtStart/stepAtEnd
Resource
Types
Multi-
Modes
Max-
Delays
Resource
Calendars
Optional
Tasks
Work
Breakdown
Structure
Objective
Function
Makespan
Earliness/
Tardiness
Task
Durations
Allocation
Costs
No
Yes
Renewable
Non-
Renewable
No
Yes
No
Yes
NoNo
Yes
Unperformed
Tasks
Inventories
producer[p]
QProd[p]stepAtEnd
consumer[c]
QCons[c] stepAtStart
p c
Yes
Modeling Inventories](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-19-320.jpg)
![20
IBM Software Group
© 2009 IBM Corporation
Max.Delays
Precedence constraints with delays
Modeling Maximum Delays
Resource
Types
Multi-
Modes
Max-
Delays
Resource
Calendars
Optional
Tasks
Work
Breakdown
Structure
Objective
Function
Makespan
Earliness/
Tardiness
Task
Durations
Allocation
Costs
No
Yes
Renewable
Non-
Renewable
No
Yes
No
Yes
NoNo
Yes
Unperformed
Tasks
Inventories
Yes
task[1] task[2]
[dmin,dmax]](https://image.slidesharecdn.com/euro2009-140613064808-phpapp01/85/Modeling-and-Solving-Resource-Constrained-Project-Scheduling-Problems-with-IBM-ILOG-CP-Optimizer-20-320.jpg)
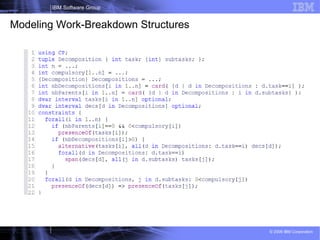
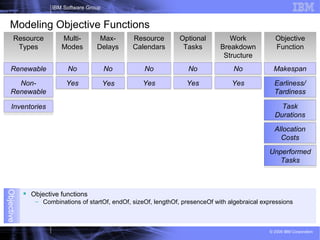
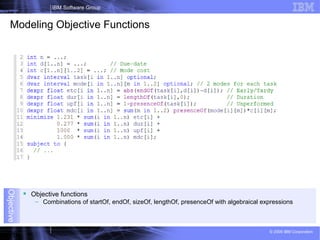
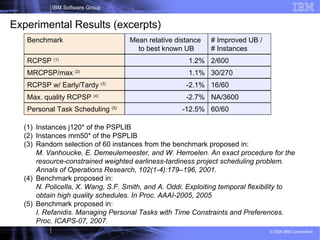

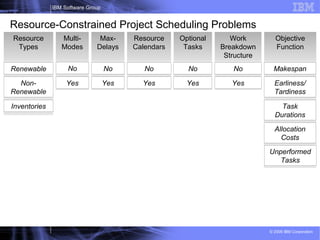
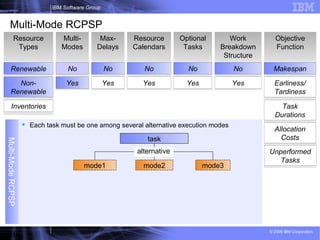
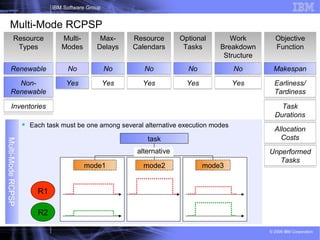
IBM ILOG CP Optimizer is a constraint programming engine that can be used to model and solve resource-constrained project scheduling problems. It uses a modeling language to express scheduling problems concisely and constraint programming techniques to automatically search for optimal schedules. The document provides examples of how CP Optimizer can model features of scheduling problems like alternative task modes, resource calendars, maximum delays, inventories, optional tasks, and work breakdown structures. It also summarizes results on benchmark problems that show improvements over best known solutions.