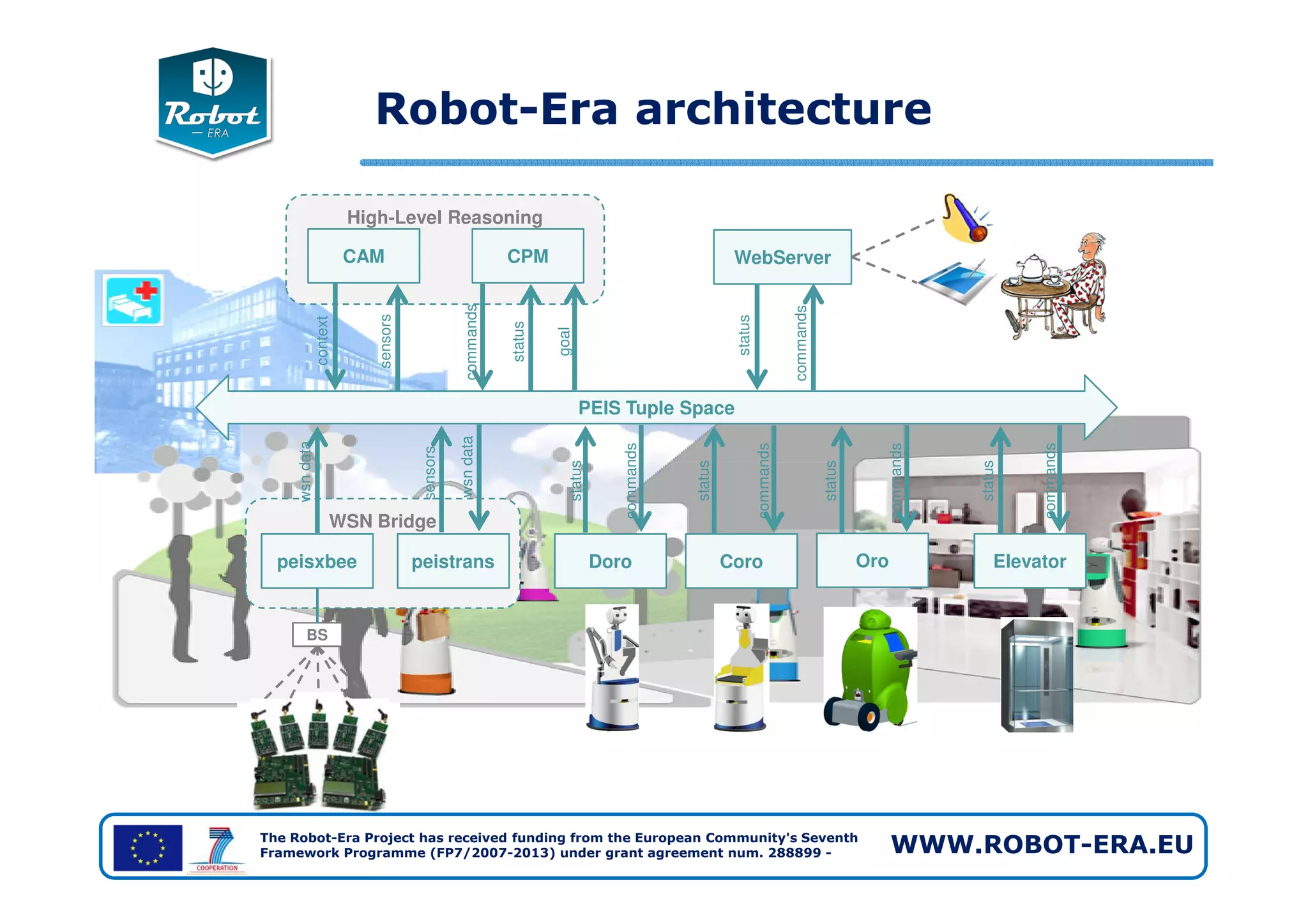
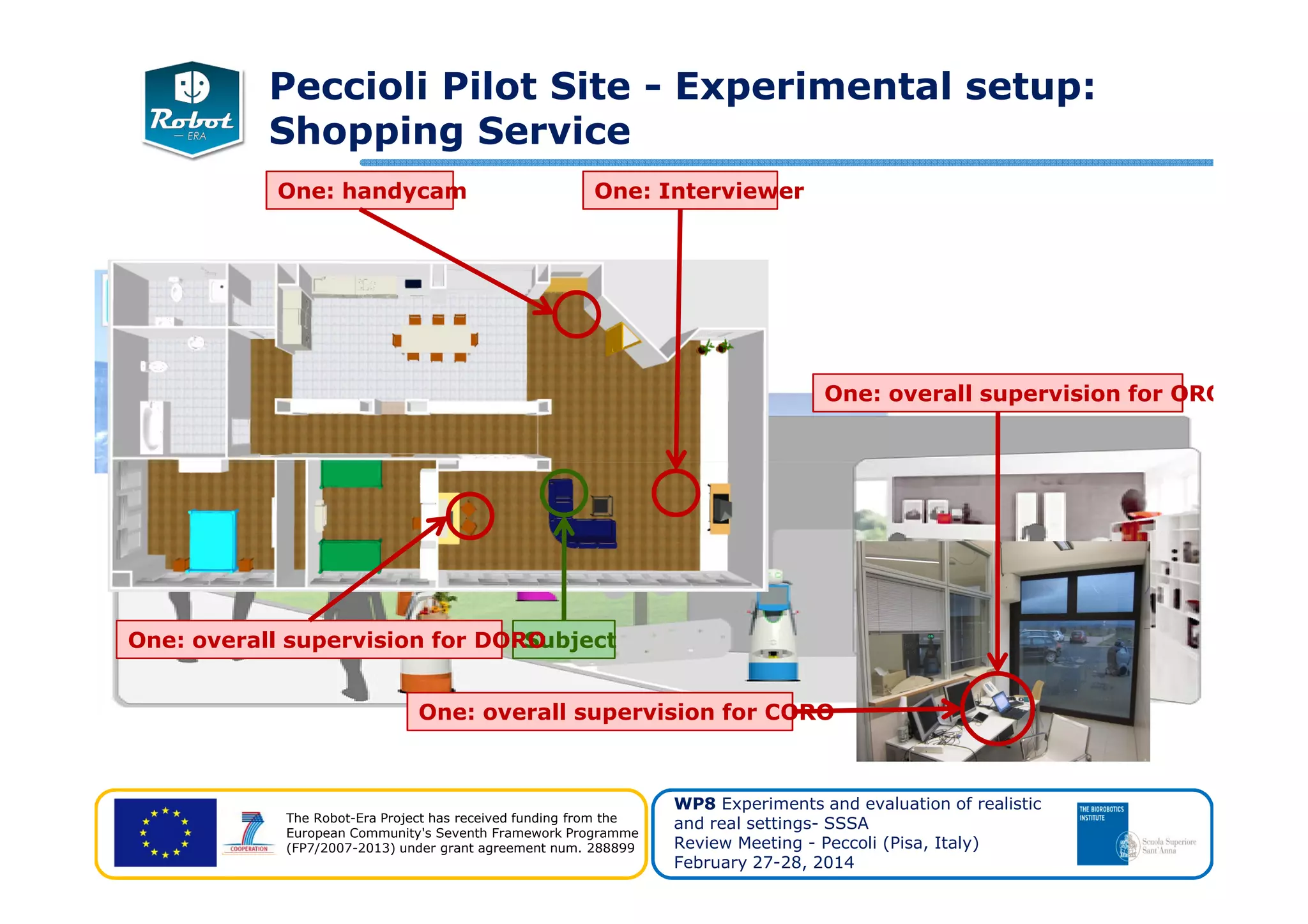
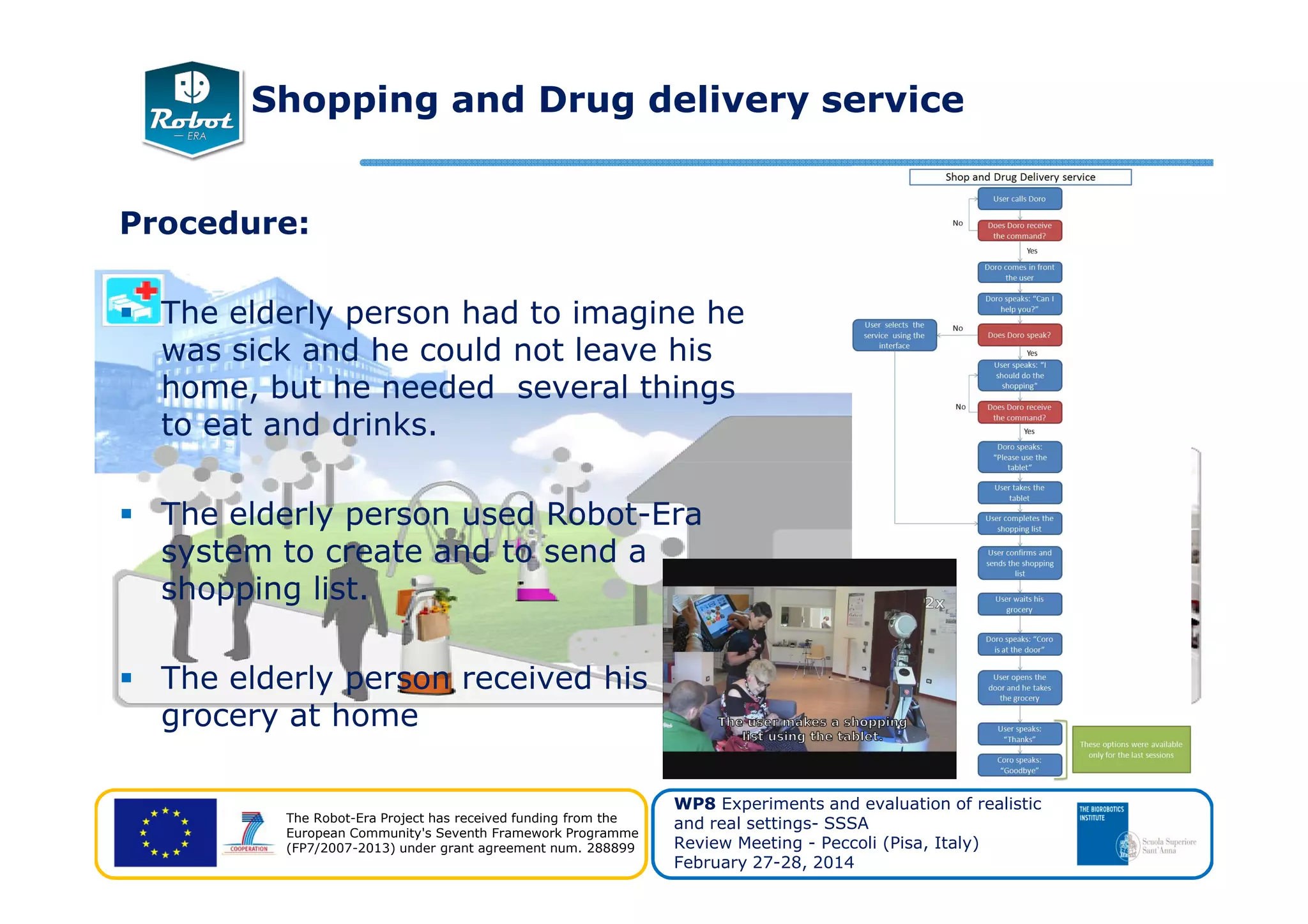
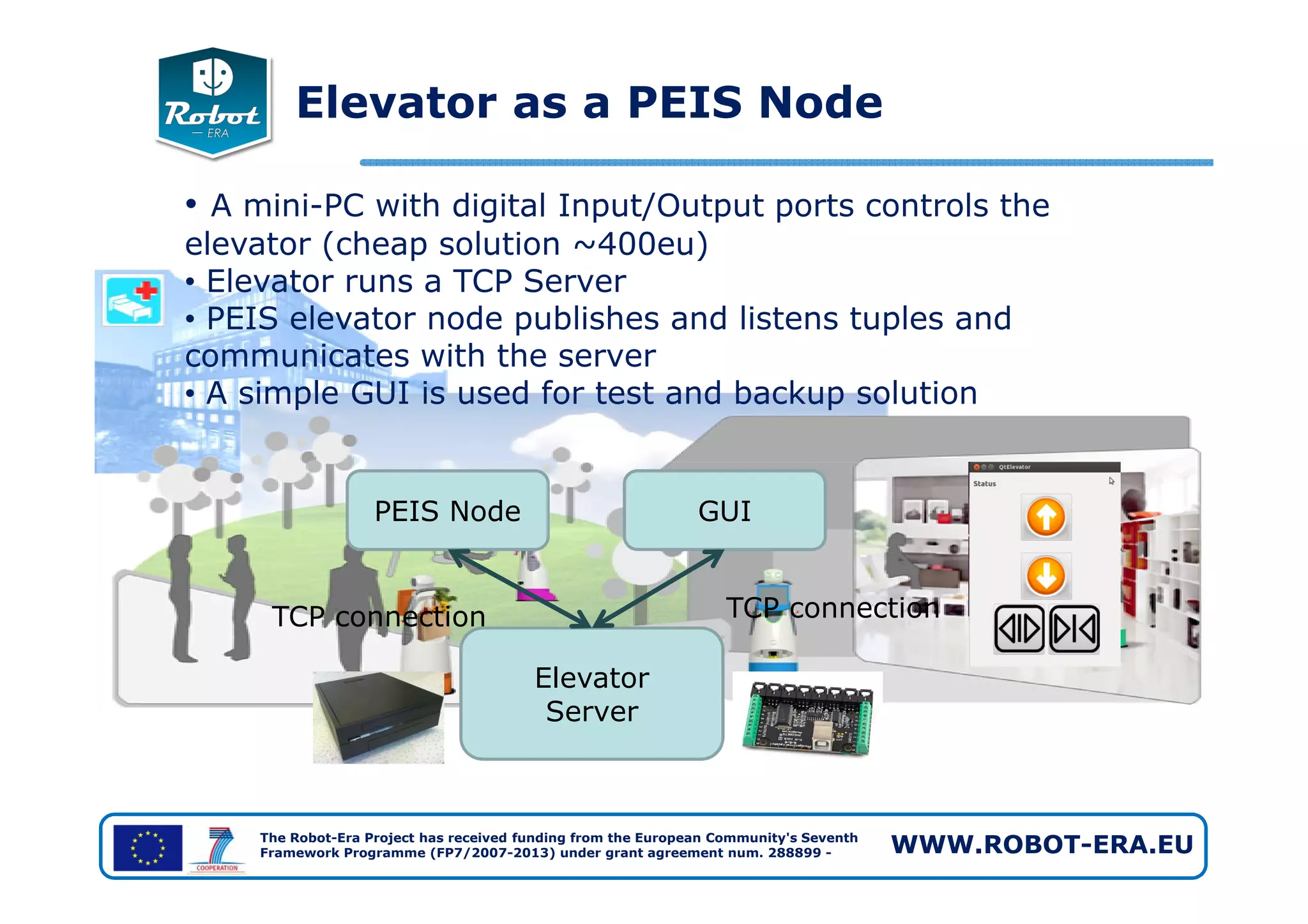
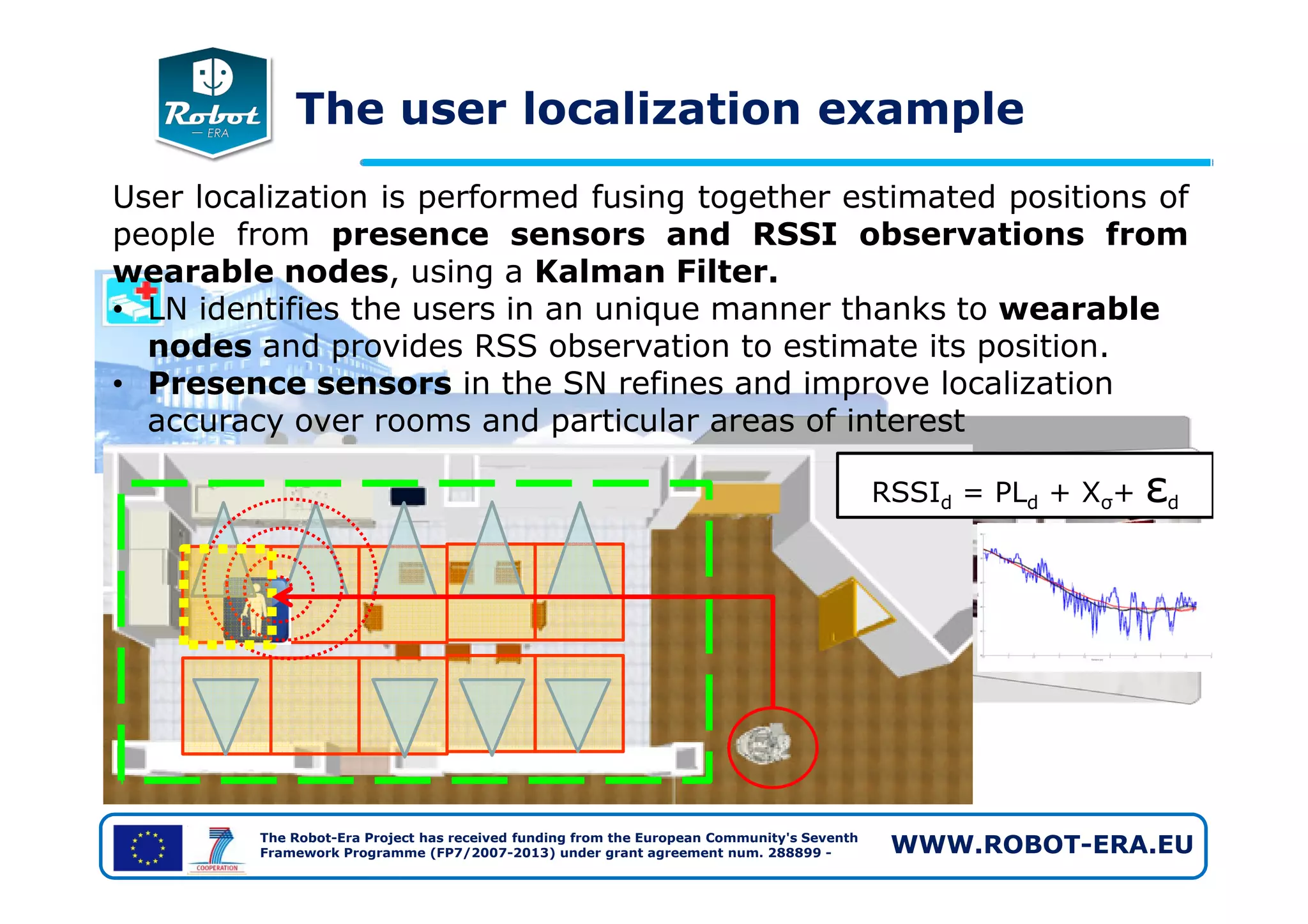
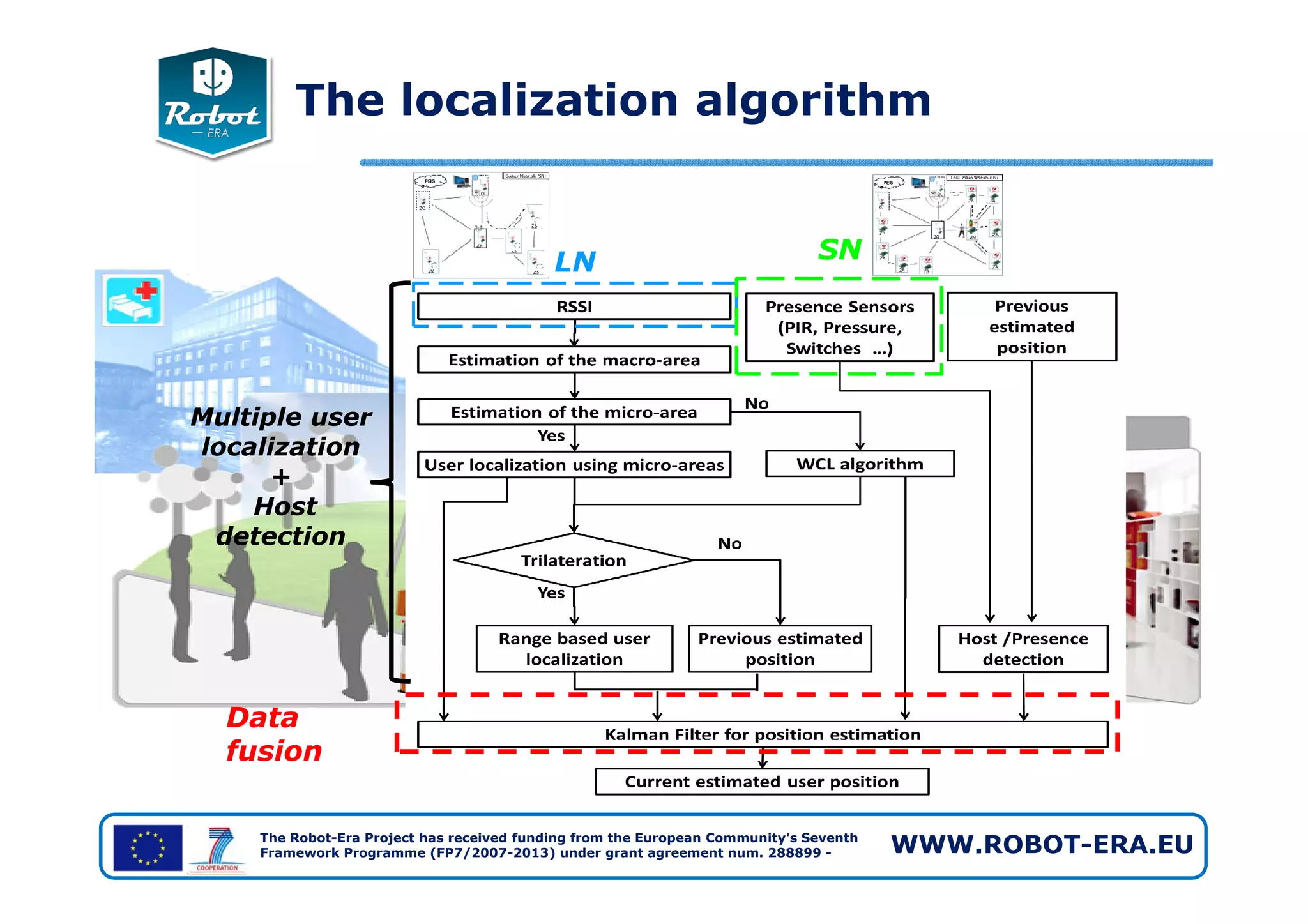
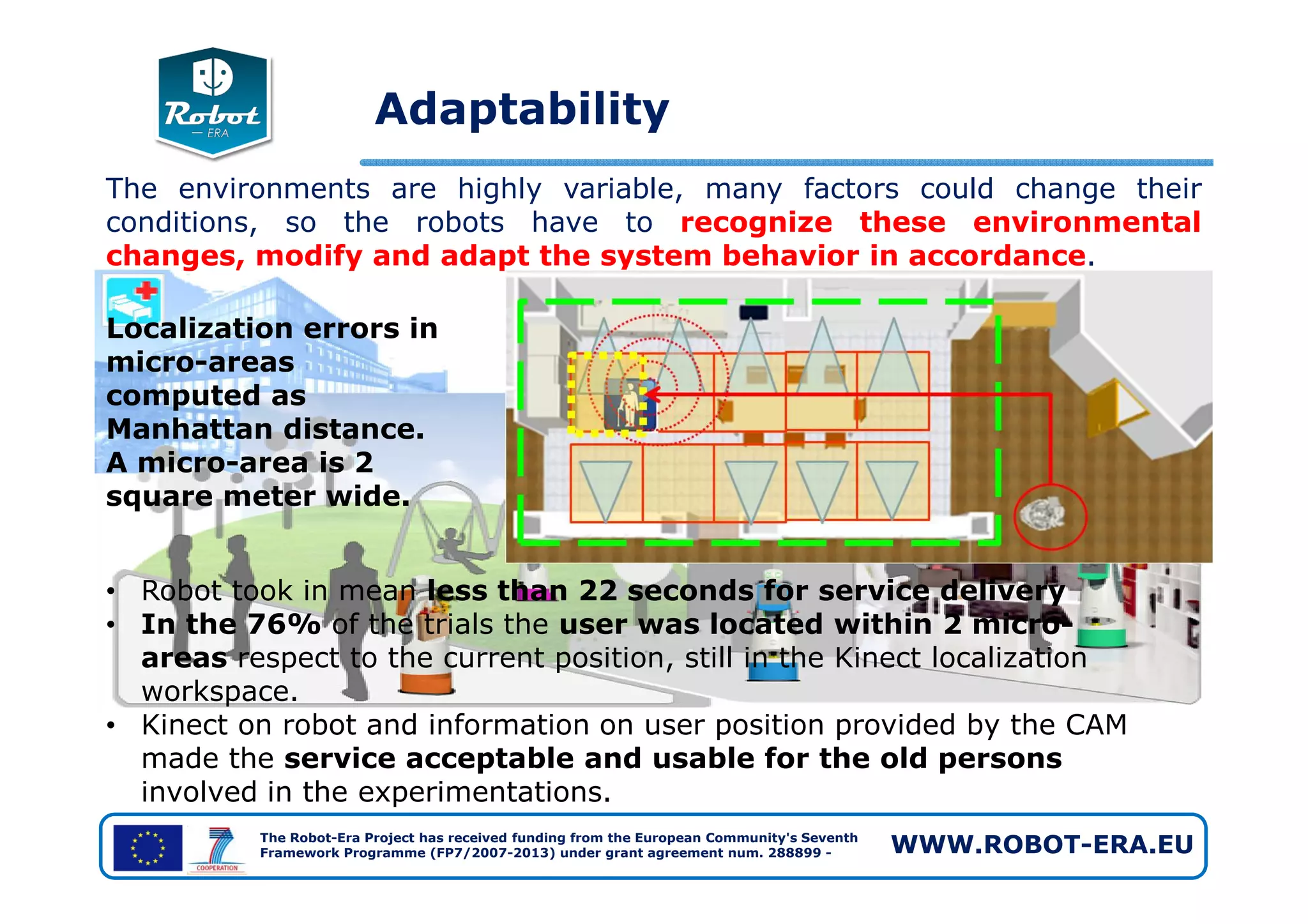
The document discusses the Robot-Era project which aims to develop and demonstrate advanced robotic services integrated into smart environments to provide independent living assistance for elderly people. The project involves different robots cooperating with each other and being coordinated by a configuration module. One of the services tested was a shopping delivery service where an elderly user created a shopping list using a GUI or speech and received their items delivered by a robot. Localization of users was performed using a Kalman filter fusing data from wearable sensors and presence sensors.







![Advantages
Advantages:
1. Respect to state of the art - fingerprint methods [1]
No need for large calibration database and lower computational
cost
2. Respect to state-of-the-art - AmI for companion robots (2011-2013)
[2][3]
Multi user localization possibility
Privacy (no cameras needed)
The Robot-Era Project has received funding from the European Community's Seventh
Framework Programme (FP7/2007-2013) under grant agreement num. 288899 - WWW.ROBOT-ERA.EU
[1] “Accurate Signal Strength Prediction based Positioning for Indoor WLAN Systems”; Anvar N.,
Yongwan P., Hoyoul J. Position, Location and Navigation Symposium, 2008 IEEE/ION ; 2008 ;
Page(s): 685 – 688
[2] Volkhardt, Michael, et al. "Playing hide and seek with a mobile companion robot." Humanoid
Robots (Humanoids), 2011 11th IEEE-RAS International Conference on. IEEE, 2011.
[3] Schroeter, Ch, et al. "Realization and User Evaluation of a Companion Robot for People with Mild
Cognitive Impairments." Proc. IEEE Int. Conf. on Robotics and Automation (ICRA 2013), Karlsruhe,
Germany, pp. 1145-1151, IEEE 2013](https://image.slidesharecdn.com/erf2014robot-erasmartenvironmentsrobotscavallo-140507102417-phpapp01/75/Robot-Era-19-2048.jpg)


























































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)









