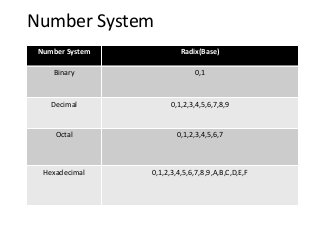
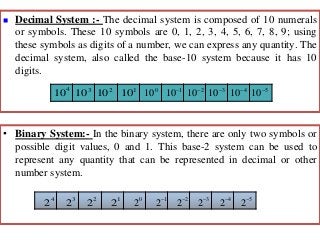
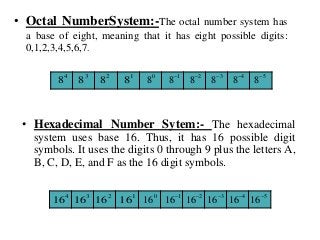
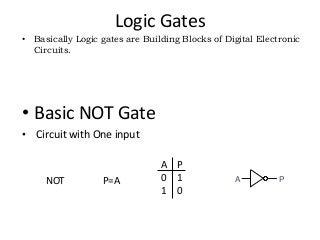
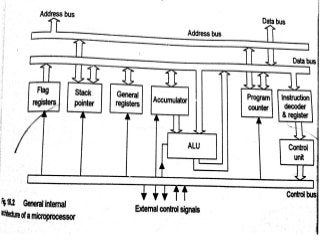
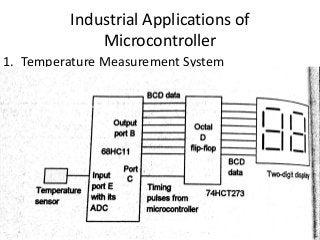
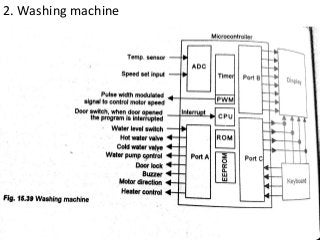
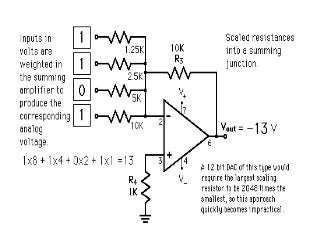
The document discusses various concepts in digital logic and microprocessors, including numeral systems (binary, decimal, octal, hexadecimal), logic gates, Boolean algebra, Karnaugh maps, sequential logic systems, and microprocessor architecture. It defines key components like the CPU, memory, and input/output systems while explaining the function of registers and types of flip-flops. Additionally, it covers microcontrollers, their applications, and data conversion methods in digital systems.









![ECE 2103_L6 Boolean Algebra Canonical Forms [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ece2103l6booleanalgebracanonicalformsautosaved-240213191859-861c7560-thumbnail.jpg?width=640&height=640&fit=bounds)






![COUNTERS [Synchronous and Asynchronous]](https://cdn.slidesharecdn.com/ss_thumbnails/counters-211217083059-thumbnail.jpg?width=640&height=640&fit=bounds)