Download to read offline
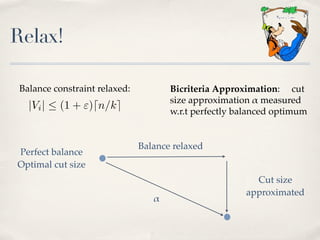
![Motivation & Complexity
✤ Divide-and-conquer algorithms
✤ VLSI design
✤ Parallel computing
✤ NP-hard to approximate cut size within any finite value alpha
[Andreev and Räcke 2006]](https://image.slidesharecdn.com/defense-120907191349-phpapp02/85/Defense-16-320.jpg)
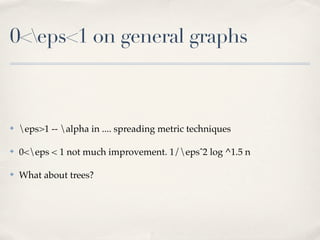
![General Graphs & Trees
✤ Algorithm is !-approximation if
finds a cut at most ! times optimal
✤ NP-hard to approximate cut size
within any finite ! [Andreev and
Räcke 2006]](https://image.slidesharecdn.com/defense-120907191349-phpapp02/85/Defense-18-320.jpg)
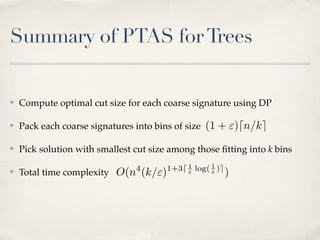
![General Graphs & Trees
✤ Algorithm is !-approximation if
finds a cut at most ! times optimal
✤ NP-hard to approximate cut size
within any finite ! [Andreev and
Räcke 2006]
Trees - simple instances?](https://image.slidesharecdn.com/defense-120907191349-phpapp02/85/Defense-19-320.jpg)
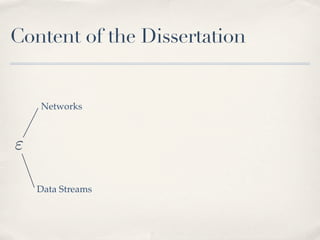
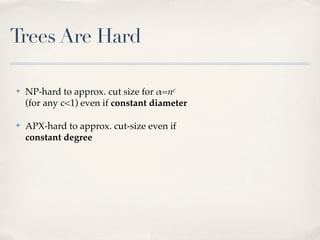
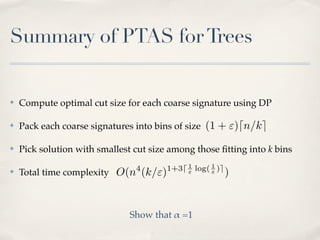
![General Graphs & Trees
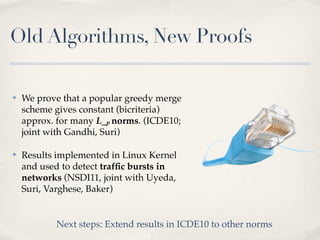
✤ Algorithm is !-approximation if
finds a cut at most ! times optimal
✤ NP-hard to approximate cut size n=31, k=8 cut size = 10
within any finite ! [Andreev and
Räcke 2006]
Trees - simple instances?
n=31, k=9 cut size = 8](https://image.slidesharecdn.com/defense-120907191349-phpapp02/85/Defense-20-320.jpg)
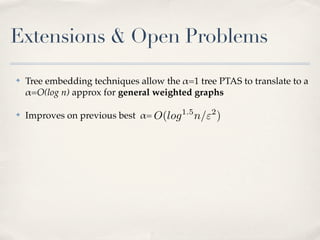
![Extension to General Graphs
✤ Decomposition of graph into collection of trees [Räcke, Madry], cut
size worsen by at most O(log n) for at least 1 tree
✤ Apply PTAS for trees to each instance
✤ Return partition for tree with minimum cut
✤ alpha = O(log n) improves](https://image.slidesharecdn.com/defense-120907191349-phpapp02/85/Defense-32-320.jpg)
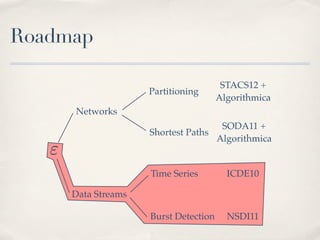

Luca Foschini defended his Ph.D. thesis on developing approximation algorithms for problems on networks and data streams. His thesis covered partitioning algorithms for networks, shortest path algorithms, time series approximation algorithms, and burst detection algorithms for data streams. He showed that these approximation techniques can help solve computationally hard problems more efficiently.



























![Script md a[1]](https://cdn.slidesharecdn.com/ss_thumbnails/script-mda1-101011070309-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

































