Recommended
PPT
PPTX
PPTX
PPT
Ch3 information technology
PDF
DOC
PPTX
PDF
PDF
PDF
PPTX
Analog & digital transmission
PPTX
PPTX
PPTX
PPT
Data communication and network
PPT
Data communication and network
PPT
DOC
PPT
PPT
PPT
PPT
PPT
PDF
PDF
PDF
PPT
PPTX
Computer_m2_datacommunication
PPTX
PPTX
More Related Content
PPT
PPTX
PPTX
PPT
Ch3 information technology
PDF
DOC
PPTX
PDF
Similar to Data tranmission
PDF
PDF
PPTX
Analog & digital transmission
PPTX
PPTX
PPTX
PPT
Data communication and network
PPT
Data communication and network
PPT
DOC
PPT
PPT
PPT
PPT
PPT
PDF
PDF
PDF
PPT
PPTX
Computer_m2_datacommunication
More from Nittaya Intarat
PPTX
PPTX
PDF
PDF
PPTX
PPT
PPT
PPT
PPT
PDF
PPTX
PPTX
PDF
PPT
PPT
Ch4 communication and network
PPT
PPT
PPT
PPTX
Ch2 องค์การและระบบสารสนเทศ
PPT
Ch1 แนวคิดเกี่ยวกับการจัดการ
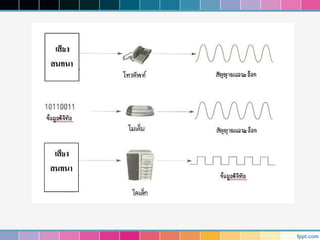
Data tranmission 1. 2. การถ่ายทอดสัญญาณข้อมูล
• การเคลื่อนย้ายข้อมูลที่อยูในรูปแบบของสัญญาณผ่าน
่
สื่อกลาง ไม่วาจะเป็นข้อมูลชนิดตัวเลข ตัวอักษร ภาพ
่
นิ่ง รวมถึงภาพเคลื่อนไหว ซึงไม่สามารถส่งผ่านระบบ
่
สื่อสารได้โดยตรง จึงจำาเป็นต้องแปลงข้อมูลดังกล่าว
ให้อยู่ในรูปของสัญญาณ เพื่อให้สามารถส่งผ่านสื่อ
กลางของระบบสื่อสารไปยังปลายทางที่ตองการต่อไป
้
• สัญญาณที่ใช้ในระบบสื่อสารได้แก่ กระแสไฟฟ้า หรือ
คลื่นแม่เหล็กไฟฟ้า เช่น คลื่นวิทยุ คลื่นแสง เป็นต้น
3. Analog Versus Digital
• ข้อมูลสามารถเป็นได้ทงข้อมูลแบบแอนาล็อกหรือข้อมูล
ั้
แบบดิจิตอล
• ข้อมูลทังสองแบบสามารถถูกแทนค่าด้วยสัญญาณ ซึง
้ ่
อาจเป็นได้ทงสัญญาณแอนาล็อกหรือสัญญาณดิจิตอล
ั้
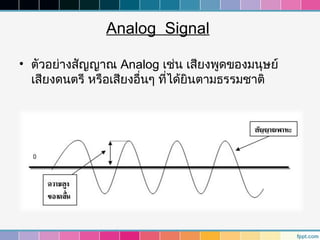
4. Analog Signal
• สัญญาณ Analog เป็นสัญญาณพาหะ (Carrier Signal
)ที่มรูปคลื่นในลักษณะต่อเนืองกล่าวคือ สัญญาณจะ
ี ่
แกว่งขึ้นลงอย่างต่อเนื่องและราบเรียบตลอดเวลา ไม่มี
การเปลี่ยนแปลงแบบทันทีทนใด ค่าระดับสัญญาณ
ั
สามารถอยูในช่วงระหว่างค่าตำ่าสุดและค่าสูงสุดของ
่
คลื่นได้ โดยค่าตำ่าสุดและค่าสูงสุดจะแทนหน่วยแรงดัน
(Voltage)
5. 6. • สัญญาณ Analogสามารถถูกรบกวนได้ง่ายจาก
สัญญาณที่ไม่พงประสงค์ทเรียกว่า “สัญญาณรบกวน”
ึ ี่
ซึ่งหากมีสัญญาณรบกวนปะปนมากับสัญญาณ Analog
แล้ว นอกจากจะส่งผลให้การส่งข้อมูลช้าลง ยังทำาให้
การจำาแนกหรือตัดสัญญาณรบกวนออกจากข้อมูล
ต้นฉบับนันเป็นไปได้ยาก
้
7. Analog Signal
• การแก้ไขปัญหาระดับสัญญาณ Analog ทีถูกลดทอนลง
่
จำาเป็นต้องใช้อุปกรณ์ทเรียกว่า Amplifier ซึ่งเป็น
ี่
อุปกรณ์เพิ่มกำาลังหรือความเข้มให้แก่สัญญาณ ทำาให้
สามารถส่งสัญญาณในระทางทีไกลออกไปได้อีก
่
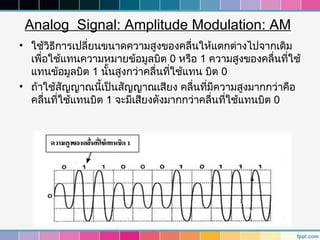
8. Analog Signal: Amplitude Modulation: AM
• ใช้วิธีการเปลี่ยนขนาดความสูงของคลื่นให้แตกต่างไปจากเดิม
เพื่อใช้แทนความหมายข้อมูลบิต 0 หรือ 1 ความสูงของคลื่นที่ใช้
แทนข้อมูลบิต 1 นั้นสูงกว่าคลื่นที่ใช้แทน บิต 0
• ถ้าใช้สัญญาณนี้เป็นสัญญาณเสียง คลื่นที่มีความสูงมากกว่าคือ
คลื่นที่ใช้แทนบิต 1 จะมีเสียงดังมากกว่าคลืนที่ใช้แทนบิต 0
่
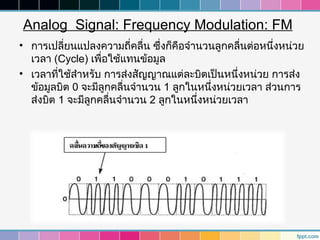
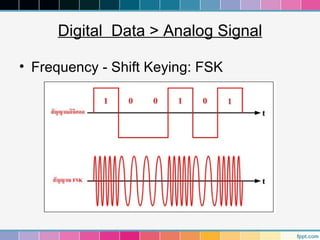
9. Analog Signal: Frequency Modulation: FM
• การเปลี่ยนแปลงความถี่คลื่น ซึ่งก็คือจำานวนลูกคลื่นต่อหนึ่งหน่วย
เวลา (Cycle) เพื่อใช้แทนข้อมูล
• เวลาที่ใช้สำาหรับ การส่งสัญญาณแต่ละบิตเป็นหนึ่งหน่วย การส่ง
ข้อมูลบิต 0 จะมีลูกคลื่นจำานวน 1 ลูกในหนึ่งหน่วยเวลา ส่วนการ
ส่งบิต 1 จะมีลูกคลื่นจำานวน 2 ลูกในหนึ่งหน่วยเวลา
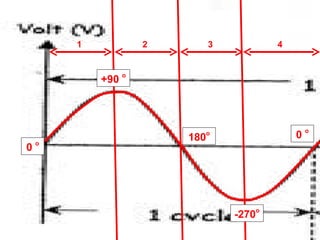
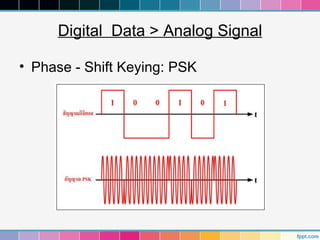
10. Analog Signal: Phase Modulation: PM
• Phase เป็นการเปลี่ยนแปลงของสัญญาณ3 ่งจะวัดจากตำาแหน่ง
1 2 ซึ 4
องศาของสัญญาณเมื่อเวลาผ่านไป โดยเมื่อเฟสมีการ
เปลี่ยนแปลง (Phase oShift)ในลักษณะเลื่อนไปข้างหน้า หรือถอย
หลัง +90
180 o 0o
o
0
-270o
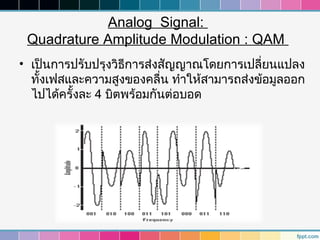
11. 12. Analog Signal:
Quadrature Amplitude Modulation : QAM
• เป็นการปรับปรุงวิธีการส่งสัญญาณโดยการเปลี่ยนแปลง
ทังเฟสและความสูงของคลื่น ทำาให้สามารถส่งข้อมูลออก
้
ไปได้ครั้งละ 4 บิตพร้อมกันต่อบอด
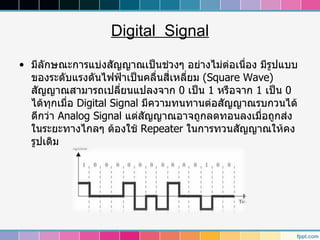
13. Digital Signal
• มีลักษณะการแบ่งสัญญาณเป็นช่วงๆ อย่างไม่ต่อเนือง มีรูปแบบ
่
ของระดับแรงดันไฟฟ้าเป็นคลื่นสี่เหลียม (Square Wave)
่
สัญญาณสามารถเปลี่ยนแปลงจาก 0 เป็น 1 หรือจาก 1 เป็น 0
ได้ทกเมื่อ Digital Signal มีความทนทานต่อสัญญาณรบกวนได้
ุ
ดีกว่า Analog Signal แต่สัญญาณอาจถูกลดทอนลงเมื่อถูกส่ง
ในระยะทางไกลๆ ต้องใช้ Repeater ในการทวนสัญญาณให้คง
รูปเดิม
14. Converting Data into Signals
• Digital Data to Analog Signal
• Analog Data to Digital Signal
• Digital Data to Digital Signal
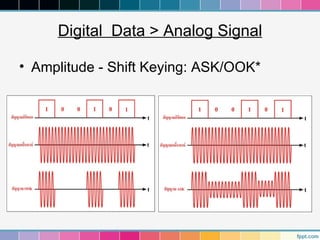
15. Digital Data > Analog Signal
• ข้อมูล Digital จะต้องถูกแปลงเป็นรูปแบบ Analog ก่อน
ทีจะถูกส่งออกไปทางสื่อกลางแบบ Analog
่
• เทคนิคการ Modulated สัญญาณ Digital จะมีความ
คล้ายคลึงกับการส่งสัญญาณ Analog เนืองจาก
่
สัญญาณ Digital มีคุณสมบัติของสัญญาณที่มระดับแรง
ี
ดันแน่นอน การ Modulated ก็จะเปลี่ยนไปตาม
Amplitude, Frequency, Phase
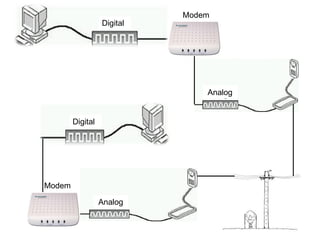
16. Modem
Digital
Analog
Digital
Modem
Analog
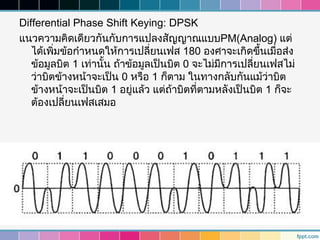
17. 18. 19. 20. Differential Phase Shift Keying: DPSK
แนวความคิดเดียวกันกับการแปลงสัญญาณแบบPM(Analog) แต่
ได้เพิ่มข้อกำาหนดให้การเปลียนเฟส 180 องศาจะเกิดขึ้นเมื่อส่ง
่
ข้อมูลบิต 1 เท่านั้น ถ้าข้อมูลเป็นบิต 0 จะไม่มีการเปลียนเฟสไม่
่
ว่าบิตข้างหน้าจะเป็น 0 หรือ 1 ก็ตาม ในทางกลับกันแม้ว่าบิต
ข้างหน้าจะเป็นบิต 1 อยู่แล้ว แต่ถ้าบิตที่ตามหลังเป็นบิต 1 ก็จะ
ต้องเปลี่ยนเฟสเสมอ
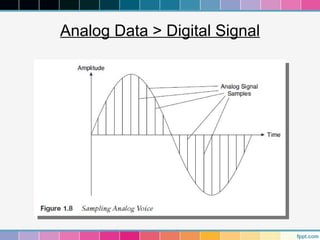
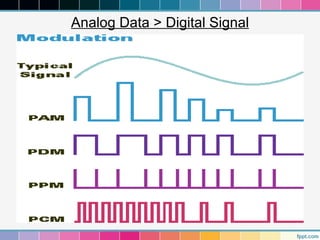
21. Analog Data > Digital Signal
• การแปลงข้อมูล Analog ให้เป็นสัญญาณ Digital ใช้
เทคนิค Pulse Amplitude Modulation หรือ Pulse
Code Modulation ใช้รูปคลื่นของสัญญาณ Analog
มาแปลงเป็น Digital โดยการวัดความสูงของลูกคลื่น
จากหลายตำาแหน่ง เรียกว่า Sampling จากนันจึงสร้าง
้
สัญญาณ Digital จากความสูงทีวัดได้
่
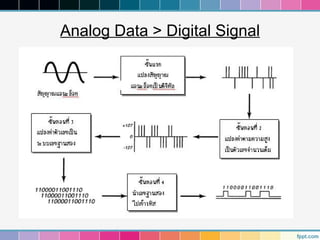
22. 23. Analog Data > Digital Signal
ในปัจจุบันการแปลงสัญญาณ Analog เป็น Digital ใช้วธีเรียกว่า
ิ
Pulse Code Modulation: PCM ซึ่งแบ่งออกเป็น 4 ขันตอนคือ
้
3. นำาเทคนิค PAM มาใช้ทำา Sampling สัญญาณ
4. จัดการแปลงค่าสัญญาณตามความสูงที่ได้ให้เป็นค่าตัว
เลขจำานวนเต็ม ตั้งแต่ 0-255
5. แปลงค่าตัวเลขเหล่านี้เป็นเลขฐานสอง (Binary Number)
6. นำาเลขฐานสองแต่ละตัวไปเข้ารหัสที่เหมาะสมกับสื่อที่เลือก
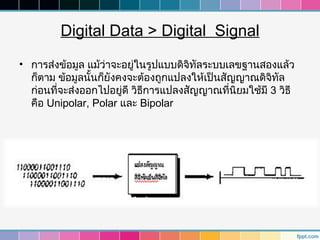
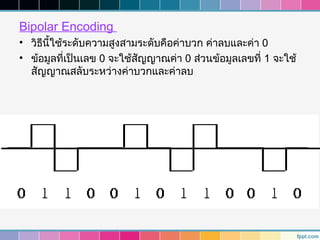
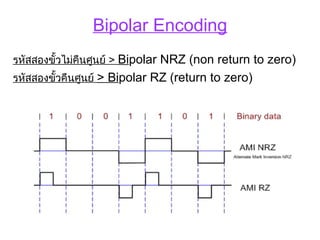
24. 25. 26. Digital Data > Digital Signal
• การส่งข้อมูล แม้ว่าจะอยู่ในรูปแบบดิจิทัลระบบเลขฐานสองแล้ว
ก็ตาม ข้อมูลนั้นก็ยังคงจะต้องถูกแปลงให้เป็นสัญญาณดิจิทัล
ก่อนที่จะส่งออกไปอยู่ดี วิธการแปลงสัญญาณที่นิยมใช้มี 3 วิธี
ี
คือ Unipolar, Polar และ Bipolar
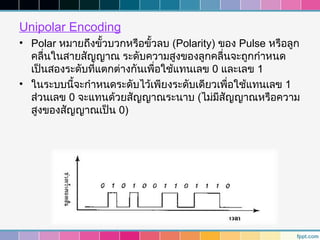
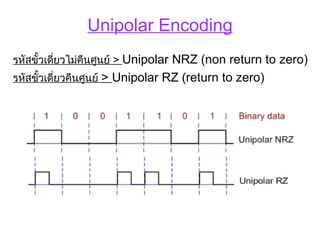
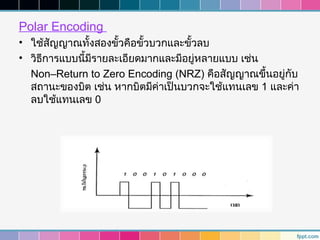
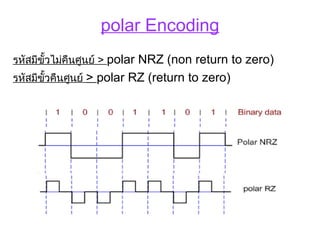
27. Unipolar Encoding
• Polar หมายถึงขั้วบวกหรือขั้วลบ (Polarity) ของ Pulse หรือลูก
คลื่นในสายสัญญาณ ระดับความสูงของลูกคลื่นจะถูกกำาหนด
เป็นสองระดับที่แตกต่างกันเพื่อใช้แทนเลข 0 และเลข 1
• ในระบบนี้จะกำาหนดระดับไว้เพียงระดับเดียวเพื่อใช้แทนเลข 1
ส่วนเลข 0 จะแทนด้วยสัญญาณระนาบ (ไม่มีสัญญาณหรือความ
สูงของสัญญาณเป็น 0)
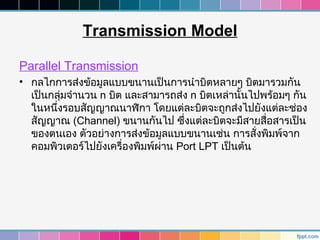
28. 29. 30. 31. 32. 33. 34. 35. 36. Transmission Model
Parallel Transmission
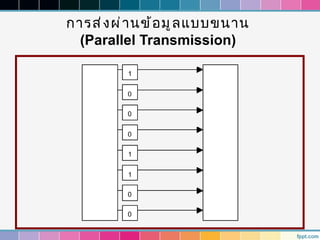
• กลไกการส่งข้อมูลแบบขนานเป็นการนำาบิตหลายๆ บิตมารวมกัน
เป็นกลุ่มจำานวน n บิต และสามารถส่ง n บิตเหล่านั้นไปพร้อมๆ กัน
ในหนึ่งรอบสัญญาณนาฬิกา โดยแต่ละบิตจะถูกส่งไปยังแต่ละช่อง
สัญญาณ (Channel) ขนานกันไป ซึ่งแต่ละบิตจะมีสายสื่อสารเป็น
ของตนเอง ตัวอย่างการส่งข้อมูลแบบขนานเช่น การสั่งพิมพ์จาก
คอมพิวเตอร์ไปยังเครื่องพิมพ์ผ่าน Port LPT เป็นต้น
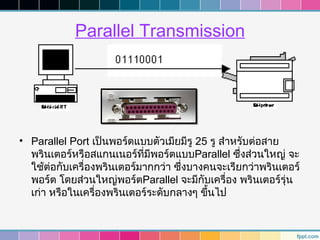
37. Parallel Transmission
• Parallel Port เป็นพอร์ตแบบตัวเมียมีรู 25 รู สำาหรับต่อสาย
พรินเตอร์หรือสแกนเนอร์ที่มีพอร์ตแบบParallel ซึ่งส่วนใหญ่ จะ
ใช้ต่อกับเครื่องพรินเตอร์มากกว่า ซึ่งบางคนจะเรียกว่าพรินเตอร์
พอร์ต โดยส่วนใหญ่พอร์ตParallel จะมีกับเครื่อง พรินเตอร์รุ่น
เก่า หรือในเครื่องพรินเตอร์ระดับกลางๆ ขึนไป
้
38. การส่ ง ผ่ า นข้ อ มู ล แบบขนาน
(Parallel Transmission)
39. Parallel Transmission
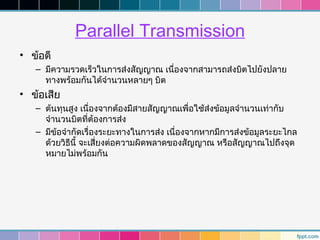
• ข้อดี
– มีความรวดเร็วในการส่งสัญญาณ เนื่องจากสามารถส่งบิตไปยังปลาย
ทางพร้อมกันได้จำานวนหลายๆ บิต
• ข้อเสีย
– ต้นทุนสูง เนื่องจากต้องมีสายสัญญาณเพื่อใช้ส่งข้อมูลจำานวนเท่ากับ
จำานวนบิตที่ต้องการส่ง
– มีข้อจำากัดเรื่องระยะทางในการส่ง เนื่องจากหากมีการส่งข้อมูลระยะไกล
ด้วยวิธีนี้ จะเสี่ยงต่อความผิดพลาดของสัญญาณ หรือสัญญาณไปถึงจุด
หมายไม่พร้อมกัน
40. Transmission Model
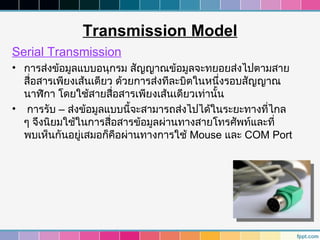
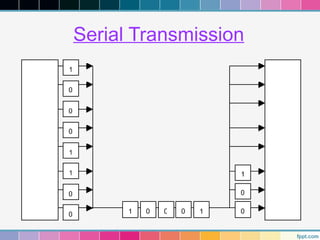
Serial Transmission
• การส่งข้อมูลแบบอนุกรม สัญญาณข้อมูลจะทยอยส่งไปตามสาย
สื่อสารเพียงเส้นเดียว ด้วยการส่งทีละบิตในหนึ่งรอบสัญญาณ
นาฬิกา โดยใช้สายสื่อสารเพียงเส้นเดียวเท่านัน
้
• การรับ – ส่งข้อมูลแบบนี้จะสามารถส่งไปได้ในระยะทางที่ไกล
ๆ จึงนิยมใช้ในการสื่อสารข้อมูลผ่านทางสายโทรศัพท์และที่
พบเห็นกันอยู่เสมอก็คือผ่านทางการใช้ Mouse และ COM Port
41. 42. Serial Port >>>
• พอร์ตแบบตัวผู้ที่มีขาสัญญาณอยู่ 9 ขา เรียกว่าคอมพอร์ต
(COM Port) เป็นพอร์ตที่ใช้สำาหรับต่อโมเด็ม เม้าส์ หรือจอย
สติ๊ก ปัจจุบันอุปกรณ์ที่ใช้พอร์ตนี้แทบไม่มีให้เห็น เนื่องจาก
หันไปใช้พอร์ตแบบ USB เป็นส่วนใหญ่
43. Serial Transmission
• ข้อดี
– ประหยัดสายสื่อสาร เนื่องจากใช้สายสื่อสารเพียงเส้นเดียว
– สามารถส่งข้อมูลทั้งในระยะทางสั้นๆ ไปจนถึงระยะทางไกล
• ข้อเสีย
– ความล่าช้าในการส่งข้อมูล เนื่องจากมีช่องสัญญาณเพียงช่องเดียว
เท่านั้น
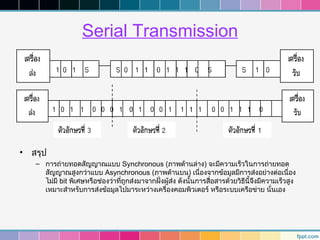
44. Serial Transmission
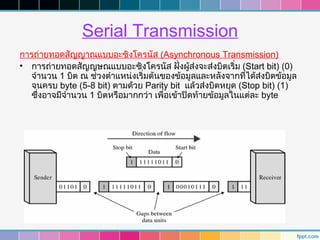
การถ่ายทอดสัญญาณแบบอะซิงโครนัส (Asynchronous Transmission)
• การถ่ายทอดสัญญษณแบบอะซิงโครนัส ฝั่งผู้ส่งจะส่งบิตเริ่ม (Start bit) (0)
จำานวน 1 บิต ณ ช่วงตำาแหน่งเริ่มต้นของข้อมูลและหลังจากที่ได้ส่งบิตข้อมูล
จนครบ byte (5-8 bit) ตามด้วย Parity bit แล้วส่งบิตหยุด (Stop bit) (1)
ซึ่งอาจมีจำานวน 1 บิตหรือมากกว่า เพื่อเข้าปิดท้ายข้อมูลในแต่ละ byte
45. Serial Transmission
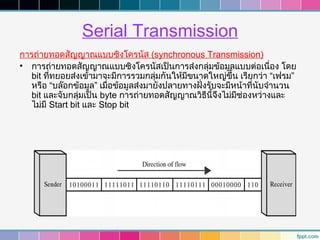
การถ่ายทอดสัญญาณแบบซิงโครนัส (synchronous Transmission)
• การถ่ายทอดสัญญาณแบบซิงโครนัสเป็นการส่งกลุ่มข้อมูลแบบต่อเนื่อง โดย
bit ที่ทยอยส่งเข้ามาจะมีการรวมกลุ่มกันให้มีขนาดใหญ่ขึ้น เรียกว่า “เฟรม”
หรือ “บล๊อกข้อมูล” เมื่อข้อมูลส่งมายังปลายทางฝั่งรับจะมีหน้าที่นับจำานวน
bit และจับกลุ่มเป็น byte การถ่ายทอดสัญญาณวิธีนี้จึงไม่มีช่องหว่างและ
ไม่มี Start bit และ Stop bit
46. Serial Transmission
• สรุป
– การถ่ายทอดสัญญาณแบบ Synchronous (ภาพด้านล่าง) จะมีความเร็วในการถ่ายทอด
สัญญาณสูงกว่าแบบ Asynchronous (ภาพด้านบน) เนื่องจากข้อมูลมีการส่งอย่างต่อเนื่อง
ไม่มี bit พิเศษหรือช่องว่าที่ถูกส่งมาจากฝั่งผู้สง ดังนั้นการสือสารด้วยวิธนี้จงมีความเร็วสูง
่ ่ ี ึ
เหมาะสำาหรับการส่งข้อมูลไปมาระหว่างเครื่องคอมพิวเตอร์ หรือระบบเครือข่าย นั่นเอง
47. ความผิดเพียนของข้อมูล
้
• ข้อมูลผิดเพี้ยน(error) หมายถึง ข้อมูลที่ผู้รับได้รับไม่เหมือนกับที่ผู้ส่งส่งให้
โดยปกติแล้วในระหว่างการรับ-ส่งข้อมูล หรือระหว่างการถ่ายทอดข้อมูลนั้น
ข้อมูลมักจะถูกทำาให้ผิดเพี้ยนไปจากเดิม เนื่องจากการรบกวนจากสิ่งต่างๆ
ทั้งที่อยู่ภายนอกระบบเครือข่ายและเกิดจากปัญหาภายในระบบเองเช่น
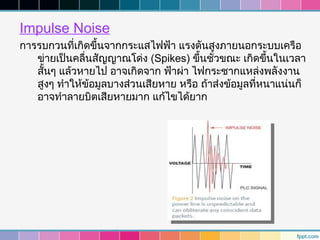
• Impulse Noise
• Gaussian Noise or White Noise
• Attenuation
• Crosstalk
• Delay distortion
• Line Failure/ Line Outages
48. 49. Gaussian Noise or White Noise
เป็นสัญญาณรบกวนที่เกิดขึนจากการเปลี่ยนแปลงคุณสมบัติของ
้
ลวดทองแดง เนืองจากความร้อนที่เพิมขึ้นในระหว่างการใช้
่ ่
งาน (Thermal Noise) เมื่อกระแสไฟฟ้าเคลื่อนที่ไปตามสาย
สื่อสารจะทำาให้เกิดความร้อนขึน และเปลี่ยนเป็น Noise เหตุที่
้
ความร้อนทำาให้สัญญาณอ่อน ถ้าเกิดขึ้นมากจะทำาให้ผิดเพี้ยน
ไป การหลีกเลี่ยงปัญหาเหล่านี้โดยการควบคุมให้อยู่ใน
อุณหภูมิที่ตำ่า
50. Attenuation
การส่งสัญญาณออกไปทางสื่อกลางไม่ว่าจะเป็นลวดทองแดง หรือ
ใย
แก้วนำาแสงหรือส่งออกไปด้วยสัญญาณชนิดใด (ไฟฟ้าหรือ
คลื่นวิทยุ)
สัญญาณนั้นจะอ่อนกำาลังลงตามระยะทางที่เพิ่มขึ้น (Attenuation)
เพราะเดินทางไกลหรือส่งสัญญาณที่มีกำาลังสูงๆไปแต่แรก สามารถ
แก้ปัญหาโดยสร้างสัญญาณขึ้นมาใหม่ โดยใช้ Amplifier เพือ ่
ขยาย
สัญญาณสำาหรับสัญญาณแอนะล็อก และใช้ Repeater สำาหรับ
สัญญาณดิจิตอล
51. Crosstalk
• สัญญาณจากสายสื่อสารต่าง ๆ ที่เกิดการรบกวนกัน เนื่องจาก
การเดินสายหลายๆ เส้นไว้ใกล้กันมากเกินไป
• โดยปกติสายสื่อสารทุกชนิดจะมีฉนวนหุ้มอยู่ ซึ่งจะป้องกัน
สัญญาณรบกวนจากภายนอกและป้องกันไม่ให้สัญญาณ
ภายในสายกระจายออกไปภายนอก ในกรณีที่ฉนวนเกิดการ
ชำารุดก็จะทำาให้เกิดสัญญาณรบกวนขึ้นทั้งสองทางได้
• การใช้สายสื่อสารขนาดเล็กเกินไปหรือใช้สัญญาณที่มีระดับ
ความแรงมากเกินไปก็จะทำาให้เกิดปัญหาได้เหมือนกัน
52. Delay distortion
การที่สญญาณวิงผ่านสายส่งด้วยความเร็วที่ไม่เท่ากัน เนื่องจาก
ั ่
ความเร็วของคลืนสัญญาณทีอยู่ตรงกลาง (ภายในช่วงคลื่นที่
่ ่
ส่งออกมา) จะมีความเร็วสูงสุดในขณะที่คลืนความถีใกล้เคียง
่ ่
จะมีความเร็วลดลงและคลืนที่อยู่ด้านขอบบนและขอบล่างจะมี
่
ความเร็วตำ่าที่สุด ทำาให้ขอมูลที่ถูกส่งผิดเพี้ยนไป หรือไปถึงใน
้
เวลาไม่เท่ากัน วิธแก้ไข ใช้ อุปกรณ์ equalizer ปรับความเร็ว
ี
ให้เท่ากันเพื่อให้ขอมูลเหมือนเดิม
้
53. Line Failure/ Line Outages
สายสื่อสารอาจชำารุดหรือขาดออกจากกัน เรียกว่า Line Failure
ในกรณีนี้ระบบการสื่อสารจะหยุดชะงัก ไม่สามารถใช้การได้
จนกว่าสายสื่อสารที่ชำารุดหรือขาดจะได้รับการซ่อมแซมให้
เหมือนเดิมต่อไป
54. 55. Cyclic Redundancy Checking: CRC
• เป็นวิธีที่นิยมใช้บนเครือข่ายท้องถิ่นและจัดได้ว่าเป็นวิธที่มี
ี
ประสิทธิภาพสูงกว่าวิธีการใช้รหัสตรวจสอบและหาผลรวม
เนื่องจากสามารถตรวจจับข้อผิดพลาดได้มากถึง99.9999%
นิยมใช้บนเครือข่ายอินเตอร์เน็ตโดยการสร้างบิตตรวจสอบ
ข้อมูล เรียกว่า frame check sequence (FCS)
• ใช้ทฤษฎีทางคณิตศาสตร์เข้ามาช่วยตรวจสอบความถูกต้องของ
ข้อมูล คือ ทฤษฎีสมการโพลีโนเมียล (Polynomial Equation)
ซึ่งนำามาใช้คำานวณหาตัวเลขที่เหมาะสมกับข้อมูล
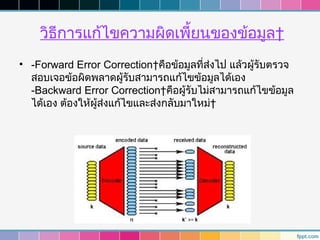
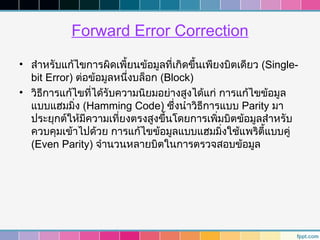
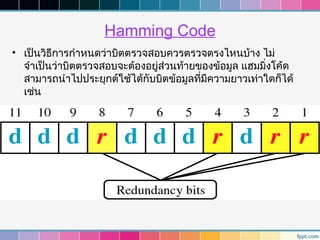
56. 57. Forward Error Correction
• สำาหรับแก้ไขการผิดเพี้ยนข้อมูลที่เกิดขึ้นเพียงบิตเดียว (Single-
bit Error) ต่อข้อมูลหนึ่งบล็อก (Block)
• วิธการแก้ไขที่ได้รับความนิยมอย่างสูงได้แก่ การแก้ไขข้อมูล
ี
แบบแฮมมิ่ง (Hamming Code) ซึ่งนำาวิธีการแบบ Parity มา
ประยุกต์ให้มีความเที่ยงตรงสูงขึ้นโดยการเพิมบิตข้อมูลสำาหรับ
่
ควบคุมเข้าไปด้วย การแก้ไขข้อมูลแบบแฮมมิ่งใช้แพริตี้แบบคู่
(Even Parity) จำานวนหลายบิตในการตรวจสอบข้อมูล
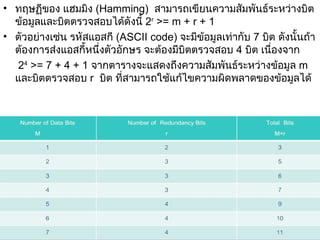
58. 59. • ทฤษฏีของ แฮมมิง (Hamming) สามารถเขียนความสัมพันธ์ระหว่างบิต
ข้อมูลและบิตตรวจสอบได้ดังนี้ 2r >= m + r + 1
• ตัวอย่างเช่น รหัสแอสกี (ASCII code) จะมีข้อมูลเท่ากับ 7 บิต ดังนั้นถ้า
ต้องการส่งแอสกี้หนึ่งตัวอักษร จะต้องมีบิตตรวจสอบ 4 บิต เนื่องจาก
24 >= 7 + 4 + 1 จากตารางจะแสดงถึงความสัมพันธ์ระหว่างข้อมูล m
และบิตตรวจสอบ r บิต ที่สามารถใช้แก้ไขความผิดพลาดของข้อมูลได้
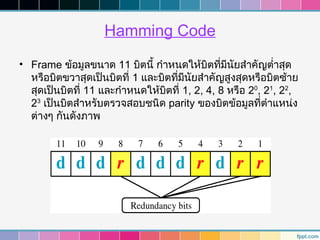
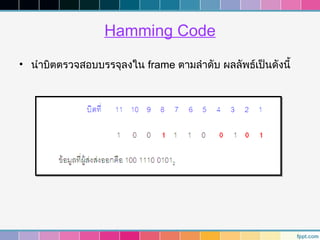
60. Hamming Code
• Frame ข้อมูลขนาด 11 บิตนี้ กำาหนดให้บิตที่มีนัยสำาคัญตำ่าสุด
หรือบิตขวาสุดเป็นบิตที่ 1 และบิตทีมีนัยสำาคัญสูงสุดหรือบิตซ้าย
่
สุดเป็นบิตที่ 11 และกำาหนดให้บิตที่ 1, 2, 4, 8 หรือ 20, 21, 22,
23 เป็นบิตสำาหรับตรวจสอบชนิด parity ของบิตข้อมูลที่ตำาแหน่ง
ต่างๆ กันดังภาพ
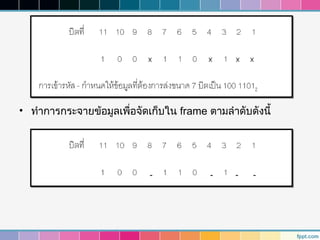
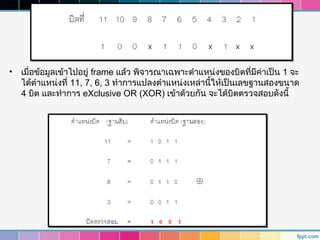
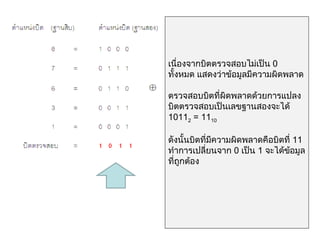
61. 62. • เมื่อข้อมูลเข้าไปอยู่ frame แล้ว พิจารณาเฉพาะตำาแหน่งของบิตที่มีค่าเป็น 1 จะ
ได้ตำาแหน่งที่ 11, 7, 6, 3 ทำาการแปลงตำาแหน่งเหล่านี้ให้เป็นเลขฐานสองขนาด
4 บิต และทำาการ eXclusive OR (XOR) เข้าด้วยกัน จะได้บิตตรวจสอบดังนี้
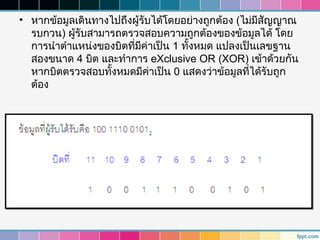
63. 64. 65. 66. • ในกรณีที่มีสัญญาณรบกวน อาจมีผลให้บิตใดบิตหนึ่งใน frame
ข้อมูลเปลี่ยนแปลงไปเนื่องจากข้อมูลเป็นเลขฐานสอง หาก
สัญญาณรบกวนจะทำาให้ค่าบิต 1 ผิดไปกลายเป็นบิตที่มีค่าเป็น
0 ในทางกลับกับหากสัญญาณรบกวนทำาให้บิตที่มีค่า 0 ผิดไปก็
จะกลายเป็นบิตที่มีค่า 1
• Hamming code 7/11 จะสามารถแก้ไขความผิดพลากได้
เฉพาะเมื่อสัญญาณรบกวนทำาให้บิตผิดไป 1 บิต ต่อข้อมูล 1
frame เท่านั้น
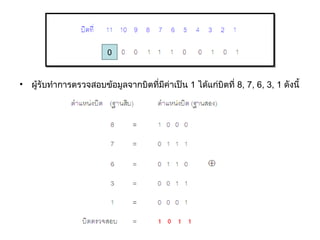
67. Hamming Code
0
• ผู้รับทำาการตรวจสอบข้อมูลจากบิตที่มีค่าเป็น 1 ได้แก่บิตที่ 8, 7, 6, 3, 1 ดังนี้
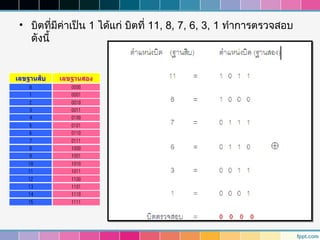
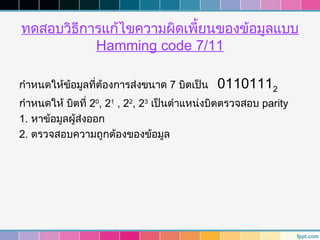
68. 69. ทดสอบวิธีการแก้ไขความผิดเพี้ยนของข้อมูลแบบ
Hamming code 7/11
กำาหนดให้ข้อมูลที่ต้องการส่งขนาด 7 บิตเป็น 01101112
กำาหนดให้ บิตที่ 20, 21 , 22, 23 เป็นตำาแหน่งบิตตรวจสอบ parity
1. หาข้อมูลผู้ส่งออก
2. ตรวจสอบความถูกต้องของข้อมูล
70. Backward Error Correction/ Error Detection With
Retransmission
• กำาหนดให้ ผู้ส่งจัดการส่งข้อมูลที่เกิดผิดเพี้ยนมาใหม่
• วิธการที่นิยม เรียกว่า การขอส่งข้อมูลซำ้าโดยอัตโนมัติ
ี
(Automatic Repeat Request; ARQ)
• การขอส่งข้อมูลซำ้ามีอยู่ 3แบบคือ แบบหยุดคอย แบบส่งย้อน
กลับ และแบบต่อเนื่อง
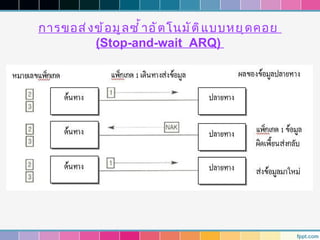
71. การขอส่ ง ข้ อ มู ล ซำ ้ า อั ต โนมั ต ิ แ บบหยุ ด คอย
(Stop-and-wait ARQ)
• กำาหนดให้ขอมูลแต่ละแพ็กเกตมีหมายเลขเฉพาะของตนเองและส่งออกไปทางช่องสื่อสาร
้
แล้วจึงหยุดคอย ข้อมูลทีไปถึงผู้รับจะถูกตรวจสอบความถูกต้อง ถ้าพบว่าถูกต้องผู้รับจะ
่
ส่งข่าวสารเรียกว่า การตอบรับ(Acknowledgement; ACK) กลับมา ผู้ส่งจึงจะส่งแพ็ก
เกตในลำาดับต่อไป
• แต่ถ้าพบว่ามีขอมูลผิดเพี้ยน ผู้รับจะตอบปฏิเสธ (Negative Acknowledgement; NAK)
้
กลับมาแทน ซึงผู้ส่งจะต้องส่งแพ็กเกตเดิมไปยังผู้รับอีกครั้งหนึ่งหรือจนกว่าจะได้รับการ
่
ตอบรับกลับมา
• วิธีการนี้มี ประสิทธิภาพในระดับตำ่ามาก เพราะช่องสื่อสารส่วนใหญ่จะว่างเปล่าคือ ไม่มี
การส่งข้อมูล เนื่องจากเวลาส่วนใหญ่ในการรอคอยระหว่างผูรับและผู้ส่ง
้
• วิธีการนี้ได้รับความนิยมในการใช้งานทังบนเครื่องเมนเฟรมและในระบบเครือข่ายเฉพาะ
้
บริเวณเนื่องจากเป็นวิธีการทีง่ายแก่การนำาไปใช้ง่ายต่อการควบคุม และสามารถไว้
่
วางใจได้ดี
72. การขอส่ ง ข้ อ มู ล ซำ ้ า อั ต โนมั ต ิ แ บบหยุ ด คอย
(Stop-and-wait ARQ)
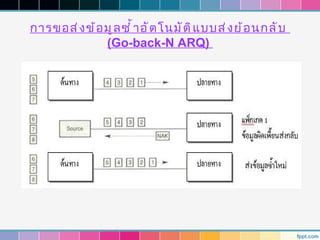
73. การขอส่ ง ข้ อ มู ล ซำ ้ า อั ต โนมั ต ิ แ บบส่ ง ย้ อ นกลั บ
(Go-back-N ARQ)
• ผู้ส่งสามารถส่งแพ็กเกตข้อมูล (ที่มีการกำาหนดหมายเลขเฉพาะ) ได้อย่างต่อ
เนื่อง
• ทางฝ่ายผู้รับยังคงตรวจสอบข้อมูลทีละแพ็กเกตแล้วจึงส่งการตอบรับสำาหรับ
แพ็กเกตที่ถกต้องหรือตอบปฏิเสธกลับไปสำาหรับแพ็กเกตที่มีขอมูลผิดเพี้ยน
ู ้
• หากแพ็กเกตหมายเลข 1 ผิดเพี้ยนจะต้องย้อนกลับไปส่งแพ็กเกตหมายเลข 1
รวมทั้งแพ็กเกตที่ส่งตามหลังหมายเลข 1 (คือแพ็กเกตหมายเลข 2 ถึง 5) กลับ
มาใหม่ทั้งหมด
• ในกรณีที่แพ็กเกตหมายเลข 1 ถูกต้อง ทั้งผู้รับและผู้ส่งก็จะไม่ต้องเสียเวลาใน
การรอคอย เพราะผู้รับก็จะได้รับแพ็กเกตหมายเลข 2 ในทันที
74. การขอส่ ง ข้ อ มู ล ซำ ้ า อั ต โนมั ต ิ แ บบส่ ง ย้ อ นกลั บ
(Go-back-N ARQ)
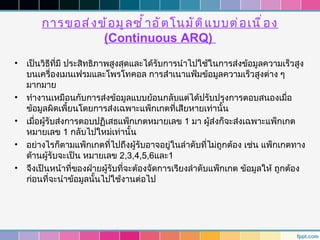
75. การขอส่ ง ข้ อ มู ล ซำ ้ า อั ต โนมั ต ิ แ บบต่ อ เนื ่ อ ง
(Continuous ARQ)
• เป็นวิธีที่มี ประสิทธิภาพสูงสุดและได้รับการนำาไปใช้ในการส่งข้อมูลความเร็วสูง
บนเครื่องเมนเฟรมและโพรโทคอล การสำาเนาแฟ้มข้อมูลความเร็วสูงต่าง ๆ
มากมาย
• ทำางานเหมือนกับการส่งข้อมูลแบบย้อนกลับแต่ได้ปรับปรุงการตอบสนองเมื่อ
ข้อมูลผิดเพี้ยนโดยการส่งเฉพาะแพ็กเกตที่เสียหายเท่านั้น
• เมื่อผู้รับส่งการตอบปฏิเสธแพ็กเกตหมายเลข 1 มา ผู้ส่งก็จะส่งเฉพาะแพ็กเกต
หมายเลข 1 กลับไปใหม่เท่านั้น
• อย่างไรก็ตามแพ็กเกตที่ไปถึงผู้รับอาจอยู่ในลำาดับที่ไม่ถูกต้อง เช่น แพ็กเกตทาง
ด้านผู้รับจะเป็น หมายเลข 2,3,4,5,6และ1
• จึงเป็นหน้าที่ของฝ่ายผู้รับที่จะต้องจัดการเรียงลำาดับแพ็กเกต ข้อมูลให้ ถูกต้อง
ก่อนที่จะนำาข้อมูลนั้นไปใช้งานต่อไป
76. การขอส่ ง ข้ อ มู ล ซำ ้ า อั ต โนมั ต ิ แ บบต่ อ เนื ่ อ ง
(Continuous ARQ)
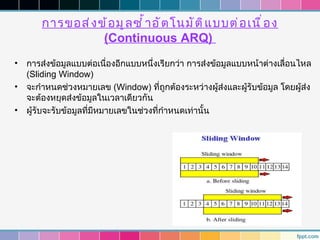
77. การขอส่ ง ข้ อ มู ล ซำ ้ า อั ต โนมั ต ิ แ บบต่ อ เนื ่ อ ง
(Continuous ARQ)
• การส่งข้อมูลแบบต่อเนื่องอีกแบบหนึ่งเรียกว่า การส่งข้อมูลแบบหน้าต่างเลื่อนไหล
(Sliding Window)
• จะกำาหนดช่วงหมายเลข (Window) ที่ถูกต้องระหว่างผู้ส่งและผู้รับข้อมูล โดยผู้ส่ง
จะต้องหยุดส่งข้อมูลในเวลาเดียวกัน
• ผู้รับจะรับข้อมูลที่มีหมายเลขในช่วงที่กำาหนดเท่านั้น
78. มาตรฐานการควบคุ ม ความผิ ด เพี ้ ย น
ข้ อ มู ล
• โมเด็มโดยทั่วไปจะมีวธีการควบคุมความผิดเพี้ยนข้อมูลที่
ิ
กำาหนดขึ้นโดยมาตรฐานหลายชนิดรวมเรียกว่า Microcom
Networking Protocols (MNP) มาตรฐานนี้ไม่มีการกำาหนดไว้
อย่างเป็นทางการ แต่ก็ได้รับการยอมรับและนำาไปใช้งานอย่าง
กว้างขวาง
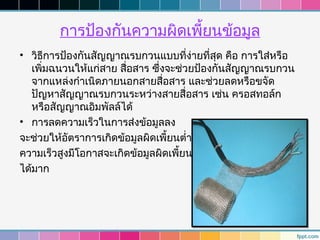
79. การป้องกันความผิดเพี้ยนข้อมูล
• วิธการป้องกันสัญญาณรบกวนแบบที่ง่ายที่สุด คือ การใส่หรือ
ี
เพิ่มฉนวนให้แก่สาย สื่อสาร ซึ่งจะช่วยป้องกันสัญญาณรบกวน
จากแหล่งกำาเนิดภายนอกสายสื่อสาร และช่วยลดหรือขจัด
ปัญหาสัญญาณรบกวนระหว่างสายสื่อสาร เช่น ครอสทอล์ก
หรือสัญญาณอิมพัลล์ได้
• การลดความเร็วในการส่งข้อมูลลง
จะช่วยให้อัตราการเกิดข้อมูลผิดเพี้ยนตำ่าลง
ความเร็วสูงมีโอกาสจะเกิดข้อมูลผิดเพี้ยน
ได้มาก
80. การถ่ายทอดสัญญาณ Digital
• การถ่ายทอดข้อมูล Digital โดยไม่ต้องแปลงสัญญาณ Analog
ก่อนแปลงกลับมาเป็น Digital มีความสามารถในการรับส่งข้อมูล
สูง และมีอตราการเกิดข้อมูลผิดเพี้ยนตำ่า มีความสามารถในการ
ั
ส่งสัญญาณจากข้อมูลหลายประเภทเช่น รูปภาพกราฟิก วีดีโอ
เป็นต้น เรียกการถ่ายทอดสัญญาณลักษณะนี้ว่า ระบบเครือข่าย
Digital แบบรวมการ (Integrated Service Digital Network :
ISDN)
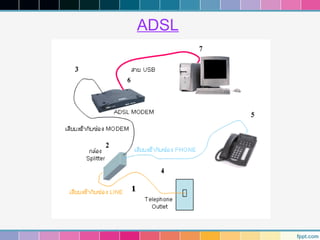
81. การถ่ายทอดสัญญาณ Digital
• สายสื่อสารระบบ Digital อีกแบบหนึ่งเรียกว่า ระบบดีเอสแอล
(Digital Subscriber Line; DSL) โดยใช้คำาย่อสำาหรับการ
อ้างอิงทัวไปว่า xDSL เช่น ADSL เป็นเทคโนโลยีการสื่อสาร
่
ข้อมูลความเร็วสูงผ่านสายโทรศัพท์ โดยใช้ย่านความถี่ที่ไม่มี
การใช้งานในระบบโทรศัพท์ ซึ่งทำาให้สามารถใช้ Internet และ
พูดคุยโทรศัพท์ได้ในเวลาเดียวกันได้
• ระบบนี้ยังคงใช้สายโทรศัพท์ Analogแบบเดิมในขณะที่ผู้ใช้
สามารถสนทนาและรับ-ส่งข้อมูล Digital ไปพร้อม ๆ กัน
82. 83. การถ่ายทอดสัญญาณ Digital
• สำาหรับสัญญาณ Digital ทีจะส่งผ่านสายสื่อสารแบบ Analog
่
ต้องถูกเปลียนให้เป็นสัญญาณ Analog เมื่อถึงเป้าหมายก็ต้อง
่
เปลี่ยนสัญญาณกลับมาเป็นแบบ Digital
• เสียงสนทนาที่ส่งผ่านสายสื่อสารระบบ Digital นั้นจะต้องใช้
อุปกรณ์เรียกว่า CODEC (Coder/Decoder) CODEC เป็นชิป
ที่ใช้เพื่อเปลี่ยนสัญญาณ Analog ให้เป็นสัญญาณ Digital ส่ง
ผ่านสายสื่อสาร และใช้ CODEC ที่ปลายทางเปลียนกลับเป็น
่
สัญญาณ Analog อีกครั้งหนึ่ง
Editor's Notes #11 สัญญาณของลูกคลื่นปกติจะเริ่มจากเส้นแนวระนาบขึ้นไป คือจะเริ่มจาก 0 องศาไปเป็น ค่าบวก 90 องศา ย้อนกลับมาที่ 180 องศาและเปลี่ยนไปเป็น ค่าลบ 270 องศาและวนกลับมาที่ 0 องศาอย่างเดิม 270 องศา = สามในสี่ของลูกคลื่น 180 องศา = ครึ่งหนึ่งของลูกคลื่น 90 องศา = หนึ่งในสี่ของลูกคลื่น ถ้าบิตต่อไปเป็นแบบบิตเดิม เช่น บิต 0 ตามด้วยบิต 0 หรือบิต 1 ตามด้วยบิต 1 คลื่นลูกต่อไปก็จะเกิดขึ้นต่อเนื่องจากคลื่นลูกแรกตามปกติ แต่ถ้าบิตต่อไปไม่ใช่บิตเดิม คือ บิต 0 ตามด้วยบิต 1 หรือบิต 1 ตามด้วย บิต 0 คลื่นลูกต่อไปแทนที่จะขึ้นไปเป็นค่าบวก ก็จะกลับลดลงเป็น ค่าลบก่อน จากนั้นกลับไปเป็นค่า 0 เพิ่มเป็นค่าบวก และกลับมาที่ 0 เป็นการครบวงจร ในกรณีนี้ทั้งบิต 0 และบิต 1 อาจเป็นลูกคลื่นที่เริ่มจาก 0 แล้วเพิ่มไปเป็นค่าบวกก่อน หรือลดลงมาเป็นค่าลบก่อนก็ได้ #13 เคเบิลโมเด็ม ( Cable Modem) ที่ใช้สำหรับส่งสัญญาณผ่านสายโคแอกเซียลใช้เทคนิคการผสมสัญญาณแบบนี้ #48 โดยปกติแล้วในระหว่างการรับ - ส่งข้อมูล หรือระหว่างการถ่ายทอดข้อมูลนั้น ข้อมูลมักจะถูกทำให้ผิดเพี้ยนไปจากเดิมเนื่องจากการรบกวนจากสิ่งต่างๆ ภายนอกระบบเครือข่ายซึ่งสามารถหลีกเลี่ยงได้แต่ไม่สามารถแก้ไขได้ และอีกส่วนหนึ่งเกิดจากปัญหาภายในระบบเองซึ่งสามารถหลีกเลี่ยงและแก้ไขได้ #55 Parity Checking เป็นเทคนิคการตรวจจับข้อผิดพลาดอย่างง่าย และเก่าแก่ โดยเพิ่มบิตเข้าไปในแต่ละหนึ่งตัวอักษร ซึ่งเป็นบิตที่ตรวจสอบความถูกต้อง #81 ประกอบด้วยสายสื่อสารแบบดิจิทัลความเร็ว 64,000 bps จำนวนสองเส้นสำหรับการส่งข้อมูล ( มีความเร็วรวมเท่ากับ 128,000 bps) และสายสื่อสารสำหรับการควบคุม ความเร็ว 16,000 bps เส้นหนึ่ง สายสื่อสารในระบบเครือข่ายนี้จึงต้องแยกออกจากสายโทรศัพท์ทั่วไป ซึ่งมีความเร็วต่ำกว่าและเป็นระบบอนาลอก #82 Digital Subscriber Line เทคโนโลยีการสื่อสารข้อมูลความเร็วสูงผ่านสายโทรศัพท์ โดยใช้ย่านความถี่ที่ไม่มีการใช้งานในระบบโทรศัพท์ ซึ่งทำให้สามารถใช้ Internet และพูดคุยโทรศัพท์ได้ในเวลาเดียวกันได้ ADSL (Asymmetric Digital Subscriber Line) SDSL (Symmetric Digital Subscriber Line) IDSL (ISDN Digital Subscriber Line) HDSL (High-bit-rate Digital Subscriber Line) VDSL (Very high-bit-rate Digital Subscriber Line) PDSL (Powerline Digital Subscriber Line)