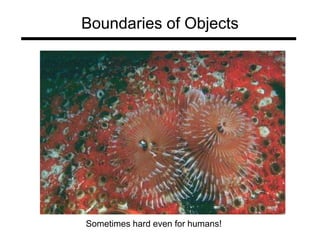
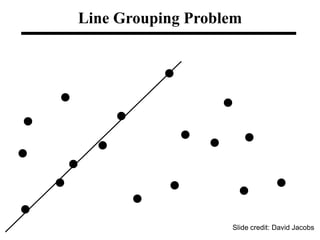
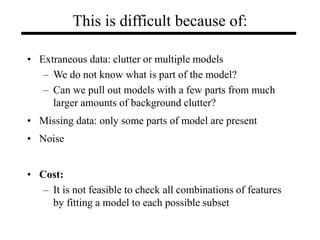
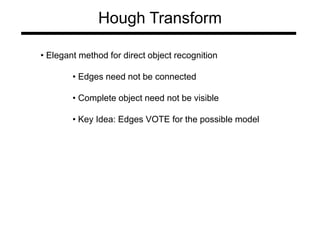
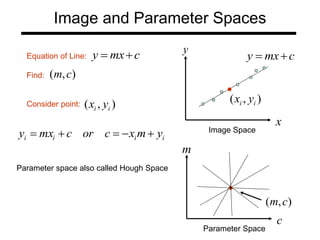
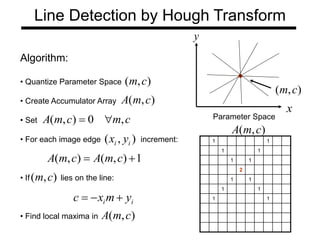
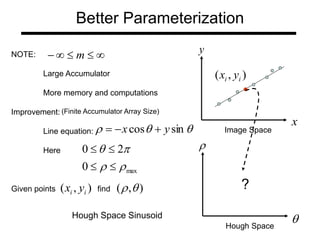
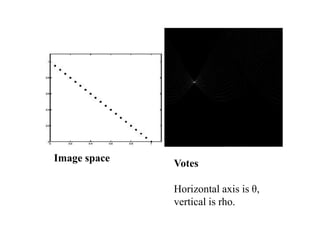
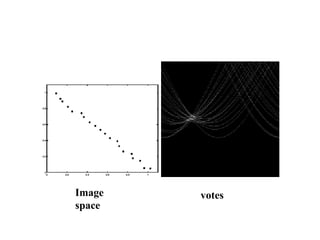
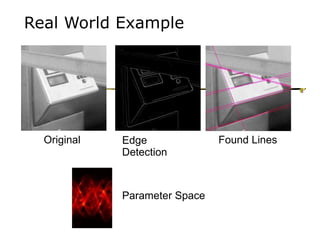
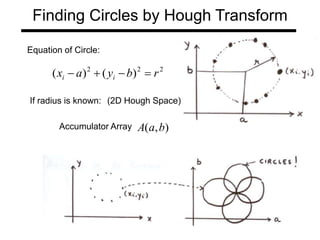
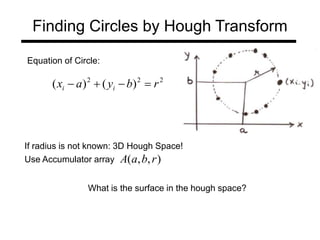
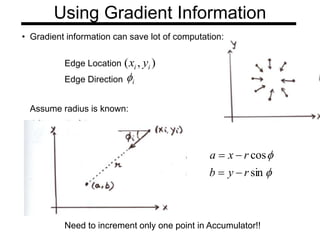
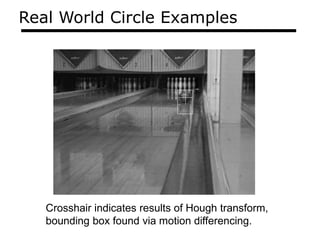
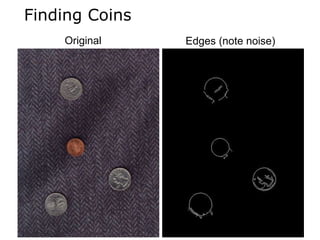
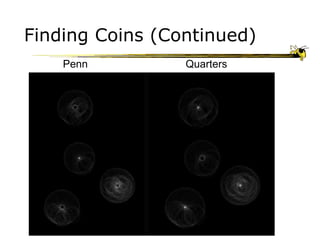
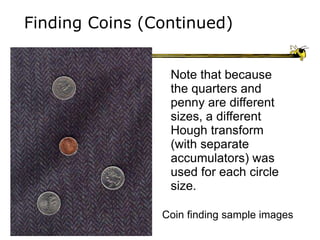
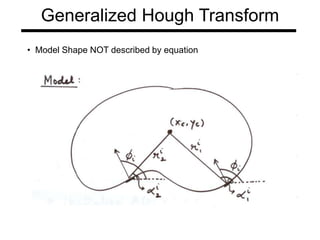
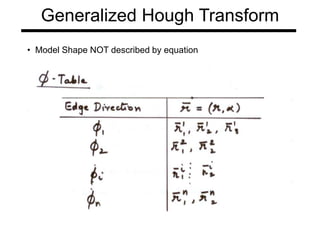
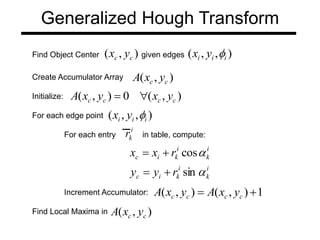
The document discusses boundary detection and the Hough transform. It covers topics like edge tracking methods, fitting lines and curves to edges, and the mechanics of the Hough transform. The Hough transform is an algorithm that can be used to detect simple shapes like lines and circles. It works by having each edge point in an image "vote" for possible shape parameters, and finding peaks in a parameter space accumulator to detect shapes. The document provides examples of using the Hough transform to detect lines and circles in images.
![Curve Fitting
y
x
Find Polynomial:
that best fits the given points
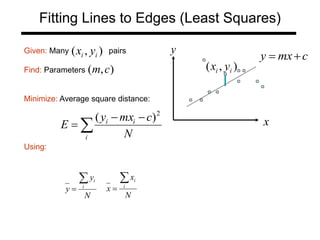
Minimize:
Using:
Note: is LINEAR in the parameters (a, b, c, d)
)
,
( i
i y
x
d
cx
bx
ax
x
f
y
2
3
)
(
i
i
i
i
i d
cx
bx
ax
y
N
2
2
3
)]
(
[
1
0
,
0
,
0
,
0
d
E
c
E
b
E
a
E
)
(x
f](https://image.slidesharecdn.com/cv1-230314114659-7e62e8c0/85/cv1-ppt-16-320.jpg)















































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)