Downloaded 43 times










![Considerazioni sui pin analogici
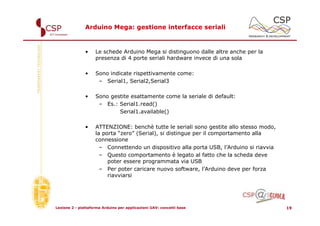
• Ogni scheda Arduino contiene un convertitore ADC (analog digital
converter) a 10 bit
– 6 canali sulla scheda Arduino base, 16 sulla scheda Arduino
Mega
• L’ADC converte un livello di tensione compreso tra 0 e 5V in un
valore numerico compreso tra 0 e 1023 (210-1 = 1023)
– Operazione eseguita a ogni invocazione di analogRead()
• La risoluzione per unità è quindi:
5
= 0, 0049 ≅ 50mV
1024
• Tuttavia questo valore di risoluzione è valido solamente se il
sensore collegato ha una dinamica [0,5V]
• Altrimenti occorre cambiare la tensione di riferimento utilizzando
l’istruzione analogReference()
– Con questa istruzione è possibile ad esempio impostare una
tensione di riferimento a 2.5V (per sensori con dinamica [0,
2.5]V)
– In questo modo i 210=1024 valori generati dall’ADC a 10 bit
saranno mappati uniformemente su valori di tensione
nell’intervallo [0, 2.5]V
Lezione 2 - piattaforma Arduino per applicazioni UAV: concetti base 14](https://image.slidesharecdn.com/cspscuolauavcorso1lez2-120208080738-phpapp01/85/Csp-scuola-uav-corso1_lez2-14-320.jpg)





Il documento presenta la piattaforma Arduino, evidenziando le sue applicazioni nel campo degli UAV e fornendo una panoramica su hardware, ambiente di sviluppo e programmazione. Vengono descritte le schede Arduino Uno e Mega 2560, nonché le funzionalità dei pin digitali e analogici, con dettagli sulla programmazione in linguaggio C/C++. Inoltre, il documento spiega come stabilire comunicazioni tramite interfacce seriali e le relative procedure di lettura e scrittura.






![Arduino ICT2016 [IT]](https://cdn.slidesharecdn.com/ss_thumbnails/arduinoparte2corsoict2016-170705144422-thumbnail.jpg?width=640&height=640&fit=bounds)
























































![Electronics LAB [with Arduino] | DAY 3](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013day3-130902112652-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Electronics LAB [with Arduino] | DAY 3](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013-day-3-130902113242-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![Electronics LAB [with Arduino] | DAY 1](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013-day-1-130902113241-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Electronics LAB [with Arduino] | DAY 1](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013day1-130902112756-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

























