![15
float - Può memorizzare numeri con la virgola. Occupa 4 bytes della RAM.
double - A doppia precisione in virgola mobile con valore massimo di
1'7976931348623157x10^308.
string - Un set di caratteri ASCII utilizzati per memorizzare informazioni di testo.
Per la memoria, usa un byte per ogni carattere della stringa, più un carattere NULL che
indica ad Arduino la fine della stringa. Esempio:
char string1[] = "Hello"; // 5 caratteri+carattere NULL
char string2[6]="Hello" // La stessa cosa di sopra
array - un elenco di variabili accessibili tramite un indice. Vengono utilizzate per creare
tabelle di valori facilmente accessibili. Come esempio se si vuole memorizzare diversi livelli
di luminosità di un LED possiamo creare 4 variabili, una per ogni livello di luminosità.
Si può utilizzare una semplice array come:
int Luce[5]={0,25,50,100};
Nel tipo della variabile la parola "array" non si dichiara, ma si usano i simboli [] e {}.
ISTRUZIONI
Istruzioni sono tutti quei comandi all’interno del programma che comandano delle variabili
Un esempio di Blocco di Istruzioni per ARDUINO:
{
digitalWrite (pin, HIGH); // il 'pin' è su
delay (1000); // un secondo di pausa
digitalWrite (pin, LOW); // il 'pin' è giù
delay (1000); // un secondo di pausa
}
N.B. ogni istruzione deve sempre terminare con ";".
ogni istruzione deve essere racchiuso tra parentesi graffe.
Le istruzioni del Preprocessore NON vanno racchiuse col “;”.
"//" è usato per inserire commenti che non saranno eseguiti dal
programma.](https://image.slidesharecdn.com/arduino-primaspiegazione-150515093023-lva1-app6892/75/Arduino-prima-spiegazione-15-2048.jpg)

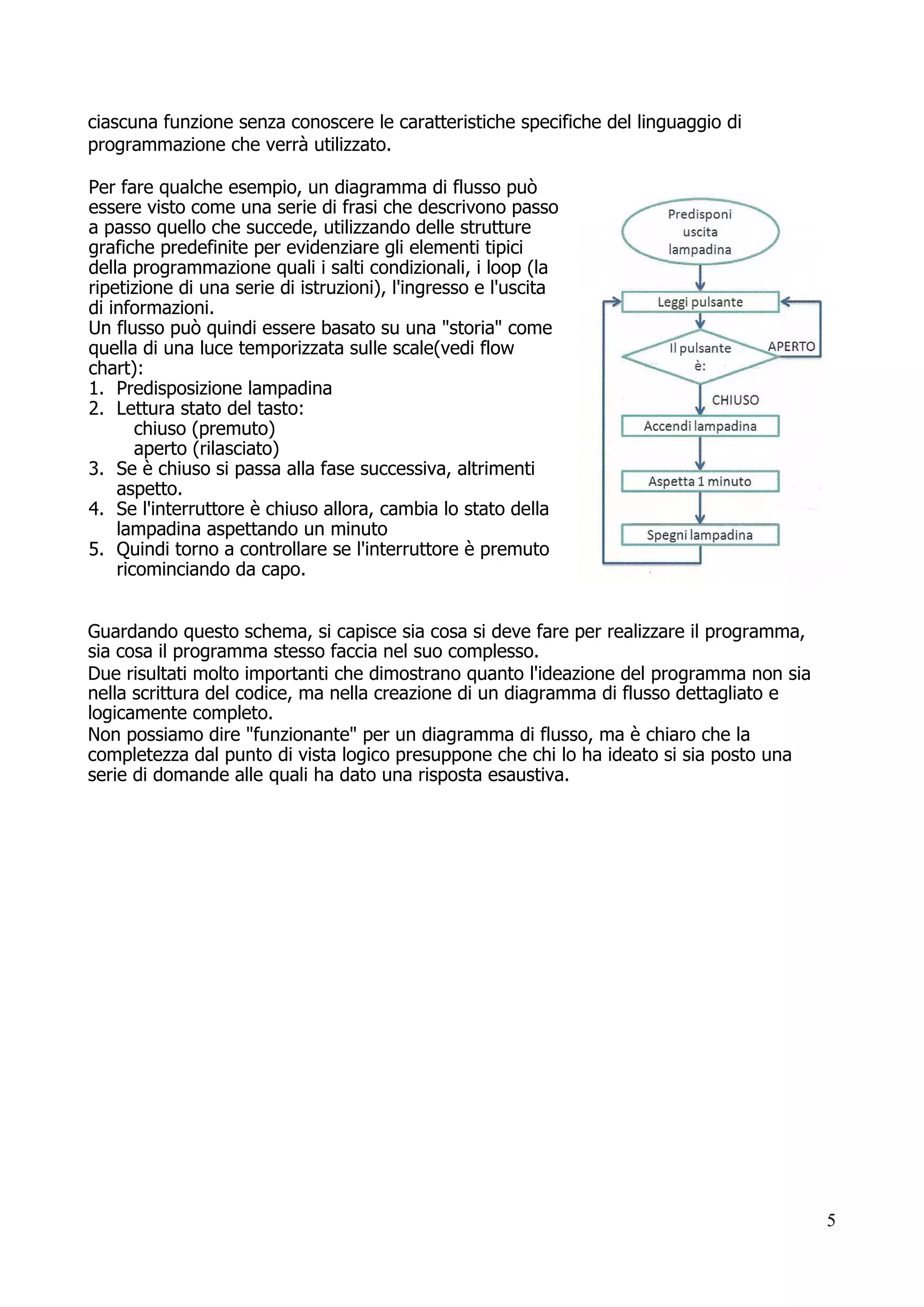
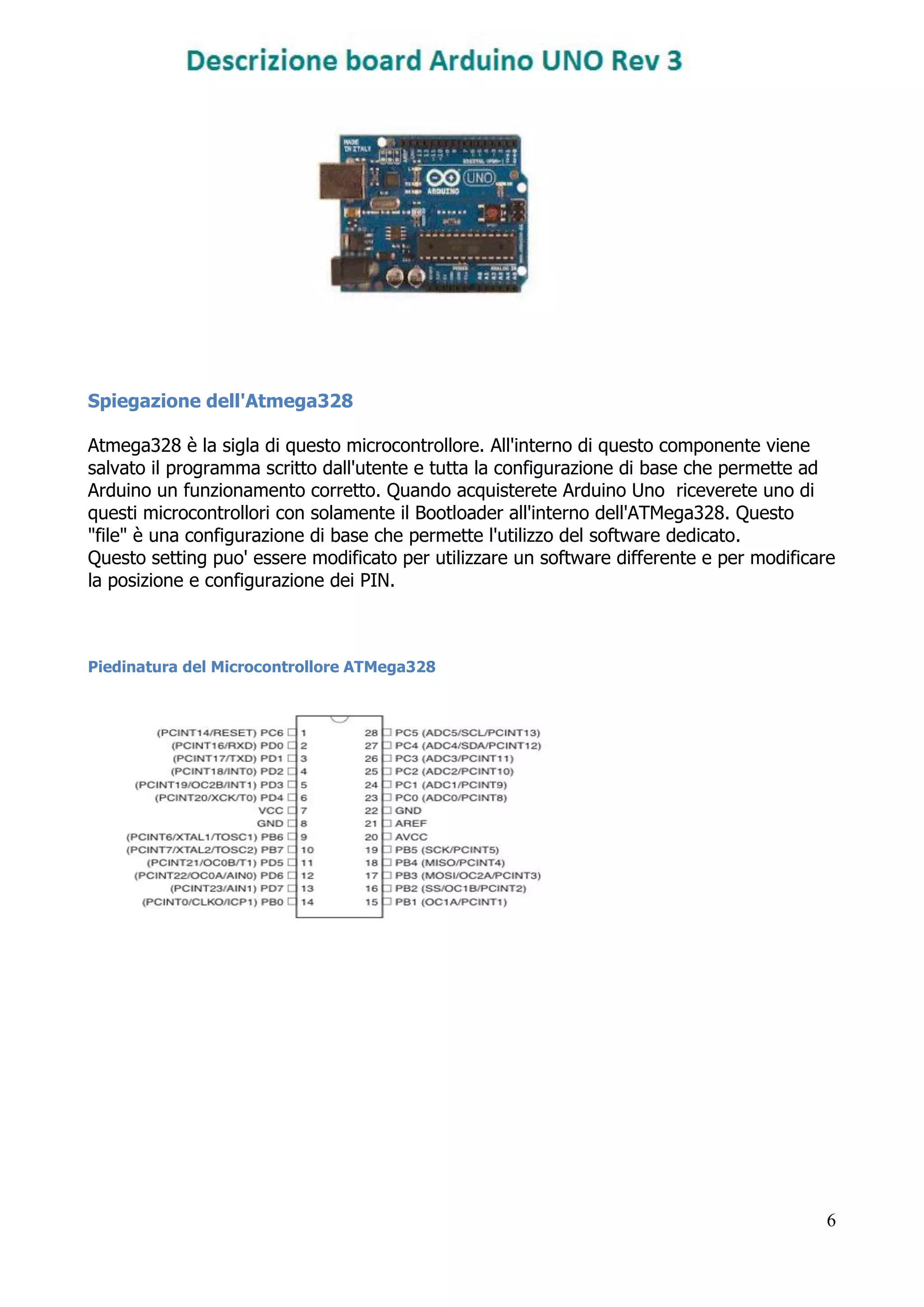
Questo documento presenta una guida introduttiva ad Arduino, una piattaforma low-cost per creare circuiti e gestire progetti di robotica e automazione. Viene descritto l'hardware della scheda, il microcontrollore atmega328, e il software che include un ambiente di sviluppo (IDE) e librerie per semplificare la programmazione. Inoltre, si offrono indicazioni su installazione, collegamento e utilizzo della scheda, enfatizzando l'importanza della creatività nella realizzazione di progetti.





















![Arduino ICT2016 [IT]](https://cdn.slidesharecdn.com/ss_thumbnails/arduinoparte2corsoict2016-170705144422-thumbnail.jpg?width=640&height=640&fit=bounds)














![Electronics LAB [with Arduino] | DAY 1](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013day1-130902112756-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![Electronics LAB [with Arduino] | DAY 1](https://cdn.slidesharecdn.com/ss_thumbnails/flussi2013-day-1-130902113241-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)