An interconnection ofthe system and a controller is called a control
system.
A system that manages, commands, regulates the behavior of devices or
processes.
Examples:
AC, Refrigerator Temperature Control, Elevator System, Smartphone
Brightness Adjustment, washing machines etc.,
CONTROLSYSTEM
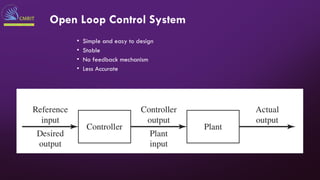
Open Loop ControlSystem
• Simple and easy to design
• Stable
• No feedback mechanism
• Less Accurate
7.
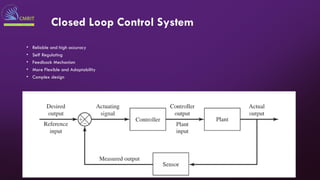
Closed Loop ControlSystem
• Reliable and high accuracy
• Self Regulating
• Feedback Mechanism
• More Flexible and Adaptability
• Complex design
8.
Control System inDrones & Robotics
Classification Types:
• Linear vs. Nonlinear Control
• Adaptive Control: Adjusts based on changing
environments
• Robust Control: Maintains performance despite
disturbances
Drones: Stability and navigation
Robotics: Precision and task-specific
control
9.
Feedback
Mechanism
Purpose of Feedback:
Allowssystems to self-correct and maintain stability
Robotic Arm:
Feedback adjusts position based on target location
Drone:
Feedback stabilizes flight based on altitude, position,
and speed sensors
10.
Sensors in
Drones
and
Robotics
Types ofSensors:
Gyroscope: Measures rotation
Accelerometer: Detects acceleration
GPS: Provides position data
LIDAR: Scans surroundings
Role in Control Systems:
Collects data for real-time adjustments
11.
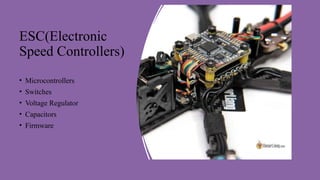
Actuators and TheirRole
What are Actuators?
Devices like motors, servos, and rotors that translate control signals into
actions
Examples:
Motor rotors adjust speed for stability
Motors in joints allow precise movement
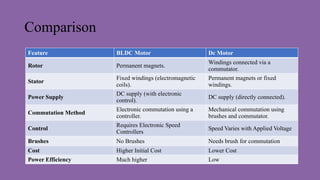
Comparison
Feature BLDC MotorDc Motor
Rotor Permanent magnets.
Windings connected via a
commutator.
Stator
Fixed windings (electromagnetic
coils).
Permanent magnets or fixed
windings.
Power Supply
DC supply (with electronic
control).
DC supply (directly connected).
Commutation Method
Electronic commutation using a
controller.
Mechanical commutation using
brushes and commutator.
Control
Requires Electronic Speed
Controllers
Speed Varies with Applied Voltage
Brushes No Brushes Needs brush for commutation
Cost Higher Initial Cost Lower Cost
Power Efficiency Much higher Low
14.
Why BLDC
Motors?
Efficiency andEndurance
High Power to Weight Ratio
Durability and Reliability
Low Maintenance
Better Control
Noise Reduction
15.
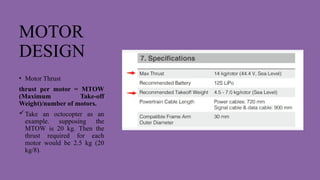
MOTOR
DESIGN
• Motor Thrust
thrustper motor = MTOW
(Maximum Take-off
Weight)/number of motors.
Take an octocopter as an
example. supposing the
MTOW is 20 kg. Then the
thrust required for each
motor would be 2.5 kg (20
kg/8).
PID
Control
–
Basics
• To controland maintain any process
• Controller uses to evaluate control
variable
Key Terms:
Measured Process variable
Preferred Set Variable
Error
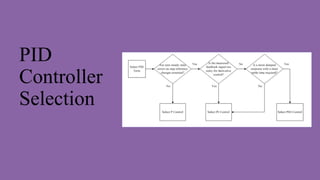
Designing PID
• Designinga PID system involves two steps.
• First, the engineer must choose the structure of
the PID controller, for example P only, P and I,
or all three terms P, I, and D.
• Second, to tune the controller, the engineer
must choose numerical values for the PID
parameters.
• In simple terms, P depends on the current error,
I depends on the sum of past errors, and D
predicts future errors based on the current rate
of change of errors.
22.
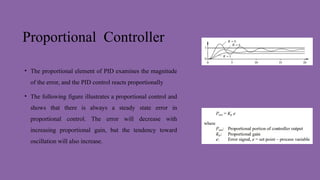
Proportional Controller
• Theproportional element of PID examines the magnitude
of the error, and the PID control reacts proportionally
• The following figure illustrates a proportional control and
shows that there is always a steady state error in
proportional control. The error will decrease with
increasing proportional gain, but the tendency toward
oscillation will also increase.
23.
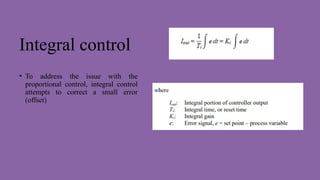
Integral control
• Toaddress the issue with the
proportional control, integral control
attempts to correct a small error
(offset)
Stability
The ability ofthe system to
maintain control of its output,
even when faced with external
disturbances or variations in
parameters
27.
Drones – Stability
•Its ability to maintain its current
state of motion or rest despite
small disturbances.
• Static Stability
• Dynamic Stability
28.
Robotics -
Stability
• Theability of a robot to maintain
its balance and control while
moving or performing tasks
1. Static Stability
2. Dynamic Stability
29.
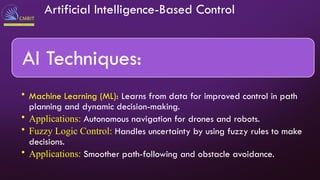
Artificial Intelligence-Based Control
AITechniques:
• Machine Learning (ML): Learns from data for improved control in path
planning and dynamic decision-making.
• Applications: Autonomous navigation for drones and robots.
• Fuzzy Logic Control: Handles uncertainty by using fuzzy rules to make
decisions.
• Applications: Smoother path-following and obstacle avoidance.
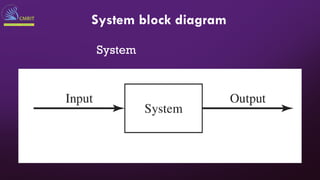
#4 We refer to the external quantities acting on the system as the inputs to the system. The condition or the state of the system is described by the state variables. The system quantities whose behavior can be measured or observed are referred to as the system outputs.