Downloaded 13 times


![Computer Organization and Architecture
CoSc 2022
SYLLABUS
Sr. Module Detailed Contents Hrs
No.
1 Fundamentalsof Boolean Algebra, Logic Gates, Simplification of 12
Digital Logic Logic
Circuits: Algebraic Simplification, Karnaugh
Maps.
Combinational Circuits : Adders, Mux,
De-Mux, Sequential Circuits : Flip-Flops
(SR, JK & D),
Counters : synchronous and asynchronous
Counter
2 ComputerSystem Comparison Of Computer Organization 06
&Architecture, Computer Components and
Functions, Interconnection Structures. Bus
Interconnections, Input / Output: I/O Module,
Programmed I/O, Interrupt Driven I/O, Direct
Memory Access
3 Memory System Classification and design parameters, Memory 08
Organization Hierarchy, Internal Memory: RAM, SRAM and
DRAM, Interleaved andAssociative Memory.
Cache Memory: Design Principles, Memory
mappings, Replacement Algorithms, Cache
performance, Cache Coherence. Virtual
Memory, External Memory : Magnetic Discs,
Optical Memory, Flash Memories, RAID Levels
4 Processor Instruction Formats, Instruction Sets, 12
Organization Addressing Modes, Addressing Modes
Examples with Assembly Language [8085/8086
CPU] , Processor Organization, Structure and
Function. Register Organization, Instruction
Cycle, Instruction Pipelining. Introduction to
RISC and CISC Architecture, Instruction Level
Parallelism and Superscalar Processors: Design
Issues.
iv](https://image.slidesharecdn.com/computerorgarchmodule-230127105931-c9a96d6b/75/Computer-Organization-and-Architecture-pdf-4-2048.jpg)















































































































































































































![COMPUTER ORGANIZATION AND ARCHITECTURE
The opcode specifies the address of the memory location where information is
stored .
Let us assume that the address of memory word to be read is in register R2 .Then
CPU transfers the address (the contents of register R2 ) to the AR, which is
connected to the address lines of the memory bus. Hence, the address is
transferred to the memory. Meanwhile, the CPU activates the read signal of the
memory to indicate the read operation is needed. As a result, memory copies data
from the addressed register on the data bus. The CPU then reads this data from
data register and loads it in the specified register.
As an example, assume that the address of the memory location to be accessed is
in register R2 and that the memory data are to be loaded into register R3 .This is
done by the following sequence of operations.
1. AR [PC] ; opcode
2. Read ; fetch
3. IR [DR] ; Load opcode in IR
4. AR [R2] ; opcode
5. Read ;fetch
6. R3 [DR] ; read data word in R3 from memory
12.2.5 Storing a Word in Memory
To store the word in memory, the CPU has to perform opcode fetch cycle and the
operand write cycle. The opcode fetch cycle gives the operation code to the CPU
.As per the operation code, CPU invokes the operand write cycle. The opcode
specifies the address of the data word to be loaded in the memory and the address
of the memory where data is to be loaded.
Let us assume that the data to be loaded is in the register R2 and the address of
memory where data to be loaded is in the register R3 . Then storing a word in
memory requires the following sequence of operations:
1. AR [PC] ; opcode
2. Read ; fetch
3. IR [DR] ; Load opcode in IR Load address
4. AR [R3] ; Load data word
5. DR [R2] ; Load data word in memory
6. Write
206](https://image.slidesharecdn.com/computerorgarchmodule-230127105931-c9a96d6b/75/Computer-Organization-and-Architecture-pdf-212-2048.jpg)


![Chapter 12: Control Unit
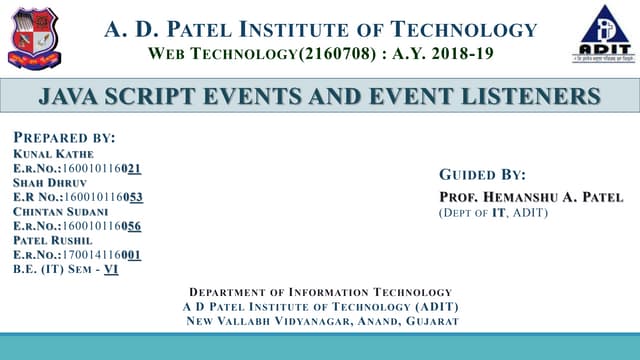
Example :- Find the complete control sequence for execution of the instruction
Add (R3) , R1 for the single-bus CPU.
Solution :- This instruction adds the contents of register R1 to the memory location
whose address is specified by the register R3 . The result is then stored in the register
R1 .The execution of this instruction requires following sequence of operations.
1. PCout , ARin ; [ opcode
2. Read DRout , IRin ; fetch ]
3. R1 out , Y in ; Load contents of R1 in Y
4. R3 out , ARin ; [ load the contents pointed by R3
5. Read ,DRout ; on common data bus
6. Yout , Sub, Zin ; subtract B from A
7. Zout ,R1 in ; store the result inR1
Until now we have seen inputs, outputs and general functions of control unit. In
this section we are going to see implementation of control unit. As mentioned
earlier, there are two general approaches to control unit design.
Hardwired control
Micro programmed Control
We discuss each of these techniques in detail, starting with Hardwired control
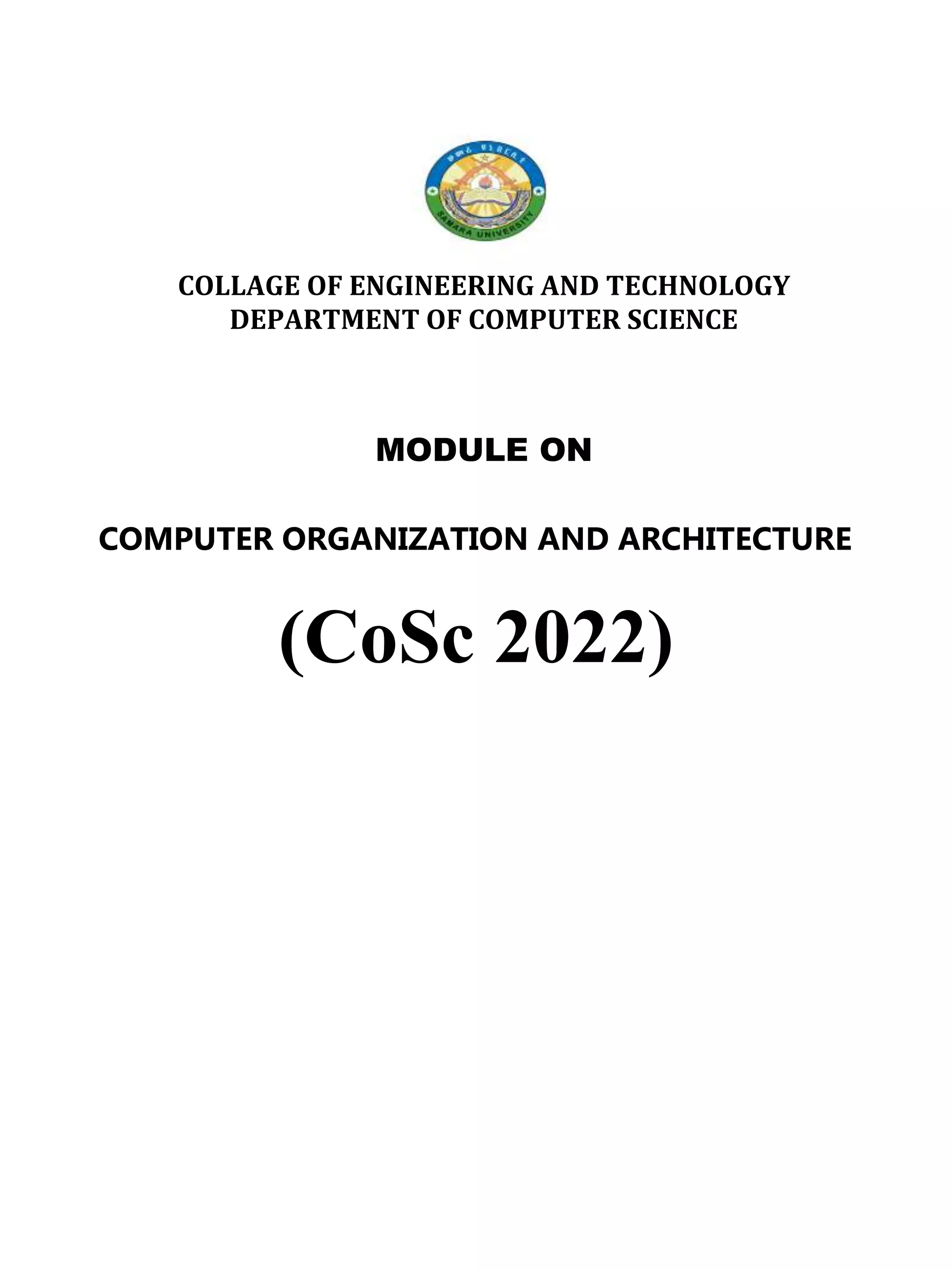
12.4 Hardwired Implementation
In the hardwired implementation, the control units use fixed logic circuits to
interpret instructions and generate control signals from them .The Fgure12.5
shows the typical hardwired implementation unit.
Figure 12.5 Typical Hardwired Implementation Unit
209](https://image.slidesharecdn.com/computerorgarchmodule-230127105931-c9a96d6b/75/Computer-Organization-and-Architecture-pdf-215-2048.jpg)











![Chapter 12: Control Unit
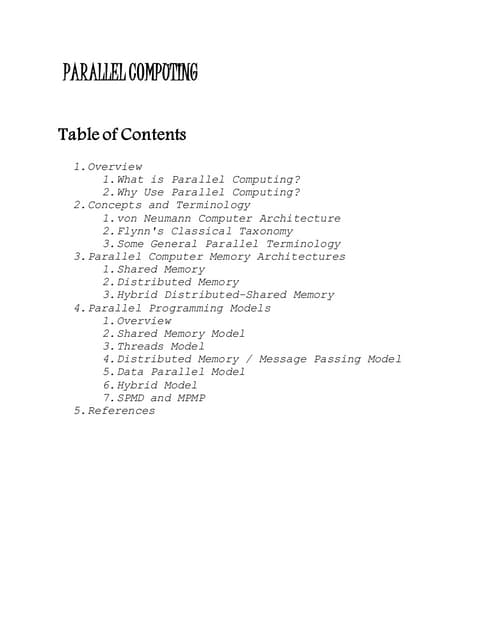
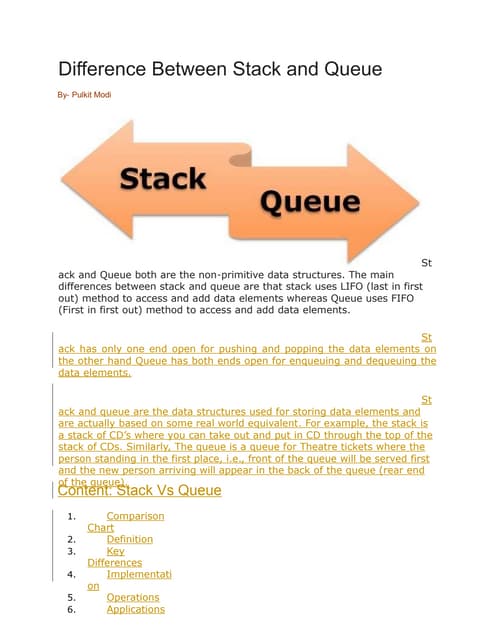
Figure 12.11: Accumulator based CPU organisation
We know that, all instructions require a common instruction- fetch step. It is
followed by an execution step that varies with instruction to instruction. In the fetch
step, the contents of the PC are copied into memory address register AR. A memory
read operation is then executed, which transfers the instruction word I ( opcode) to
memory data register DR. This is expressed in the flowchart as DR M (AR).
The opcode is then transferred to instruction register IR, where it is decoded ; at
the same time PC is incremented to point to the next consecutive instruction in
the memory.
The operations required to execute instruction will depend on the opcode. For
example, load instruction LD X is executed in three steps : the address field of LD X
is transferred to AR , the contents of the addressed location are transferred to
DR by performing memory read operation [ DR M(AR)] , and finally, the
contents of DR are transferred to the accumulator AC. As shown in the
figure12.12, instruction require 1 to 3 steps for execution.
221](https://image.slidesharecdn.com/computerorgarchmodule-230127105931-c9a96d6b/75/Computer-Organization-and-Architecture-pdf-227-2048.jpg)
































































The document outlines the Computer Organization and Architecture syllabus for the COSC 2022 module at Samara University, detailing various topics such as digital logic, combinational and sequential circuits, memory systems, and processor organization. It includes a structure of chapters and their page numbers, as well as specific contents within each chapter covering fundamental concepts and advanced architectures. Key concepts discussed also feature boolean algebra, logic gates, and the significance of minterms and maxterms in boolean expressions.



























![Lecture of information technology 1-COA-2015[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/lec1-coa-20151-250806170123-c25a8fe6-thumbnail.jpg?width=640&height=640&fit=bounds)