The document discusses the representation of curves and surfaces in computer graphics, highlighting their importance in modeling real-world objects and applications such as CAD and data plots. It describes various types of curves, including implicit, explicit, and parametric curves, particularly focusing on parametric cubic curves like Hermite, Bézier, and splines. The text emphasizes the need for smooth and stable representations while evaluating the trade-offs between different polynomial degrees used in curve representation.
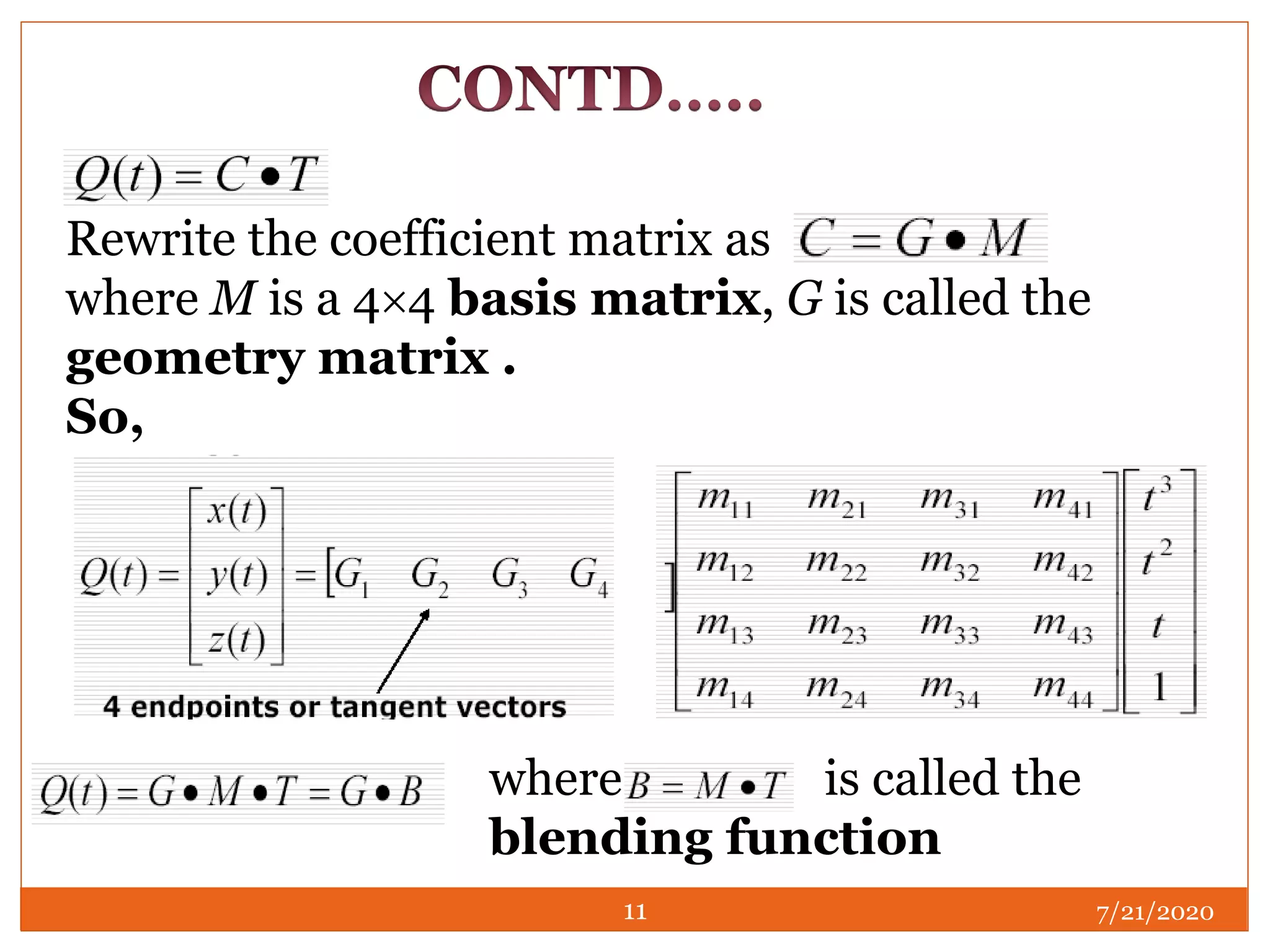
![General form:
c= coefficient matrix
T= parameter matrix
GMTCTtztytxtQ
tttT
ddd
ccc
bbb
aaa
C
dtctbtatz
dtctbtaty
dtctbtatx
zyx
zyx
zyx
zyx
zzzz
yyyy
xxxx
)]()()([)(
]1[
)(
)(
)(
23
23
23
23
7/21/20209](https://image.slidesharecdn.com/computergraphicsparametriccubiccurves-200721063459/75/Computer-graphics-parametric-cubic-curves-9-2048.jpg)
![GMTCTtztytxtQ )]()()([)(
If cubic the derivation….
7/21/202010](https://image.slidesharecdn.com/computergraphicsparametriccubiccurves-200721063459/75/Computer-graphics-parametric-cubic-curves-10-2048.jpg)