Downloaded 51 times










![REFERENCES:
[1] B. Sicilian and O. Khatib, Eds., Springer Handbook of Robotics, Springer, 2008.
[2] IEEE Society of Robotics and Automation’s Technical Committee on Networked
Robots, available: http://www-users.cs.umn.edu/~isler/tc/
[3] P. Jacquet et al., “Optimized Link State Routing Protocol for Ad Hoc Networks,”
Multi Topic Conf. 2001, IEEE INMIC 2001, Technology for the 21st Century, Proc.
IEEE Int’l., 2001, pp. 62–68.
[4] C. Perkins et al., “Performance Comparison of Two On-Demand Routing
Protocols
for Ad Hoc Networks,” IEEE Personal Commun., vol. 8, no. 1, Feb. 2001, pp. 16–28.](https://image.slidesharecdn.com/cloudcomputingslids-130608060155-phpapp01/85/Cloud-computing-slids-14-320.jpg)


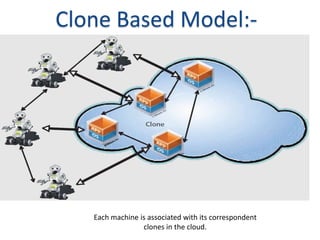
The document proposes a new architecture for networked robots to increase efficiency. It discusses three elastic computing models for cloud robotics: peer-based, proxy-based, and clone-based. It also outlines the technical challenges of robot mobility, communication ability, and security issues. Finally, it discusses the advantages of cloud robotics in enabling offloading of computation tasks, access to shared knowledge and data, and future applications in domains like industry and healthcare.