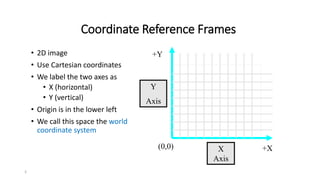
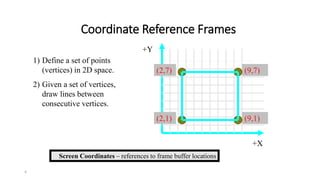
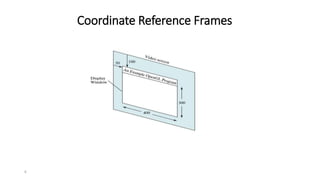
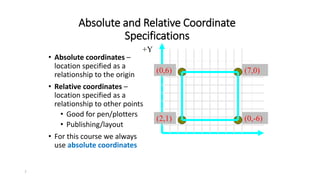
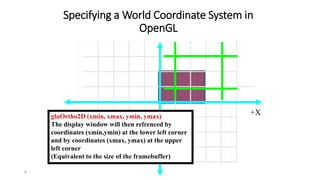
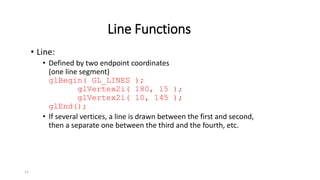
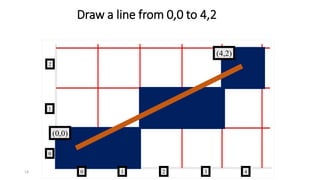
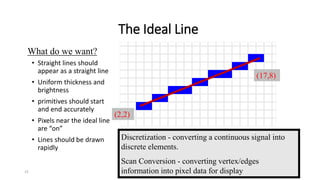
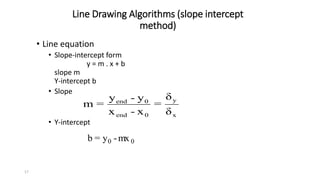
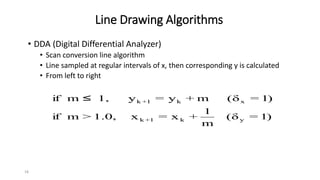
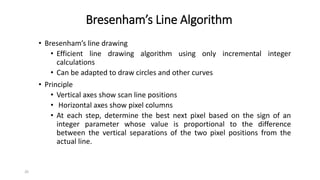
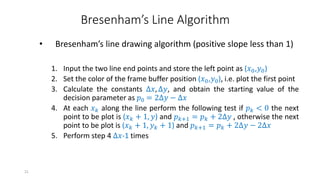
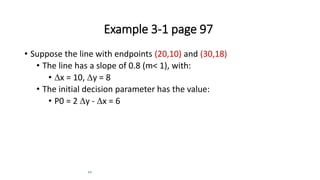
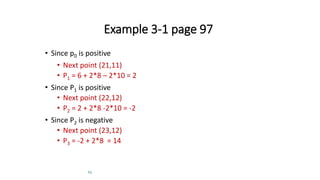
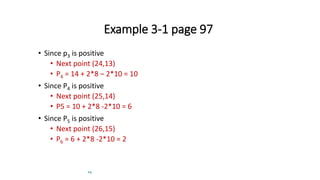
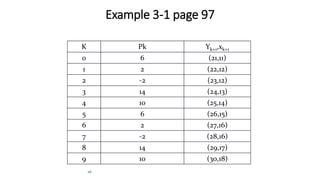
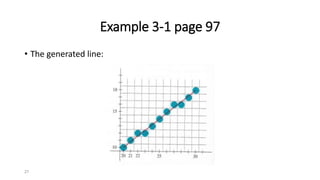
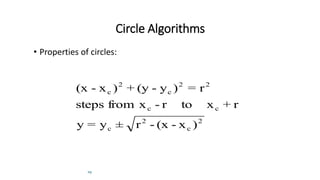
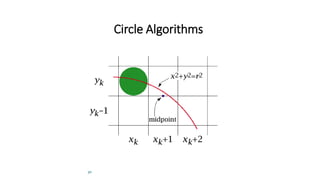
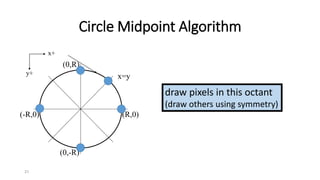
The document discusses graphics output primitives and coordinate reference frames used in computer graphics. It defines basic primitives like points and lines and describes how they are used to construct more complex graphics. It explains absolute and relative coordinate systems and how to specify a world coordinate system in OpenGL. It also describes common algorithms for drawing lines and circles like Bresenham's line algorithm and the midpoint circle algorithm.