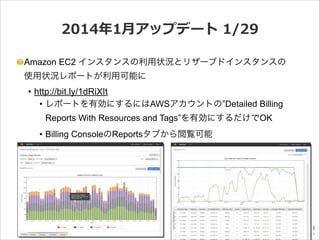
2014年年1⽉月アップデート 1/29
Amazon EC2インスタンスの利用状況とリザーブドインスタンスの
使用状況レポートが利用可能に
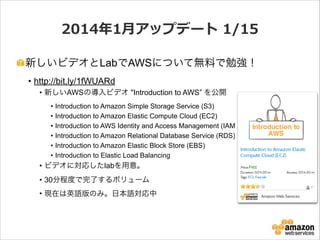
• http://bit.ly/1dRiXIt
• レポートを有効にするにはAWSアカウントの”Detailed Billing
Reports With Resources and Tags”を有効にするだけでOK
• Billing ConsoleのReportsタブから閲覧可能
15.
2014年年1⽉月アップデート 1/29
Amazon SQSに 新機能 Dead Letter Queue を追加
• http://bit.ly/1aLguVy
• 正常終了せず永続的にキューに残ってしまう問題を回避する機能
• 取得回数が設定された最大値に達したメッセージはキューから取り除か
れ、指定されたDead Letter Queueへと送られる
• 新たに設定できるようになったパラメータ
• Maximum Receives - ひとつのメッセージがコンシューマーアプリ
ケーションから取得される最大回数の設定値。取得回数がこの値に
達したメッセージはDead Letter Queueに自動的に送られる。
• Dead Letter Queue - Dead Letter Queueとしてメッセージを受け取
るSQSキューのARN(Amazon Resource Name)。上記のMaximum
Receivesで設定された値に取得回数が達したメッセージはここで指
定されたキューに送信される。
16.
2014年年1⽉月アップデート 1/29
Amazon SimpleEmail Service が 新しく2つのロケーションを追加
• http://bit.ly/1dRC450
• SESのエンドポイントが2つ追加され、全部で3つに。
• 米国東部 (北バージニア)
• 米国西部 (オレゴン) - New
• EU (アイルランド) - New
• リージョン毎に個別に設定を行う必要がある。











































![[最新版(12/5 最新版) が別にございます! Descriptionをご確認ください] AWS Black Belt Online Seminar A...](https://cdn.slidesharecdn.com/ss_thumbnails/awsblackbelt2018reinvent2018digestupdated-181201055918-thumbnail.jpg?width=640&height=640&fit=bounds)
![[最新版は別にございます! Descriptionをご確認ください] AWS Black Belt Online Seminar AWS re:Inven...](https://cdn.slidesharecdn.com/ss_thumbnails/awsblackbelt2018reinvent2018digest-181130052158-thumbnail.jpg?width=640&height=640&fit=bounds)























