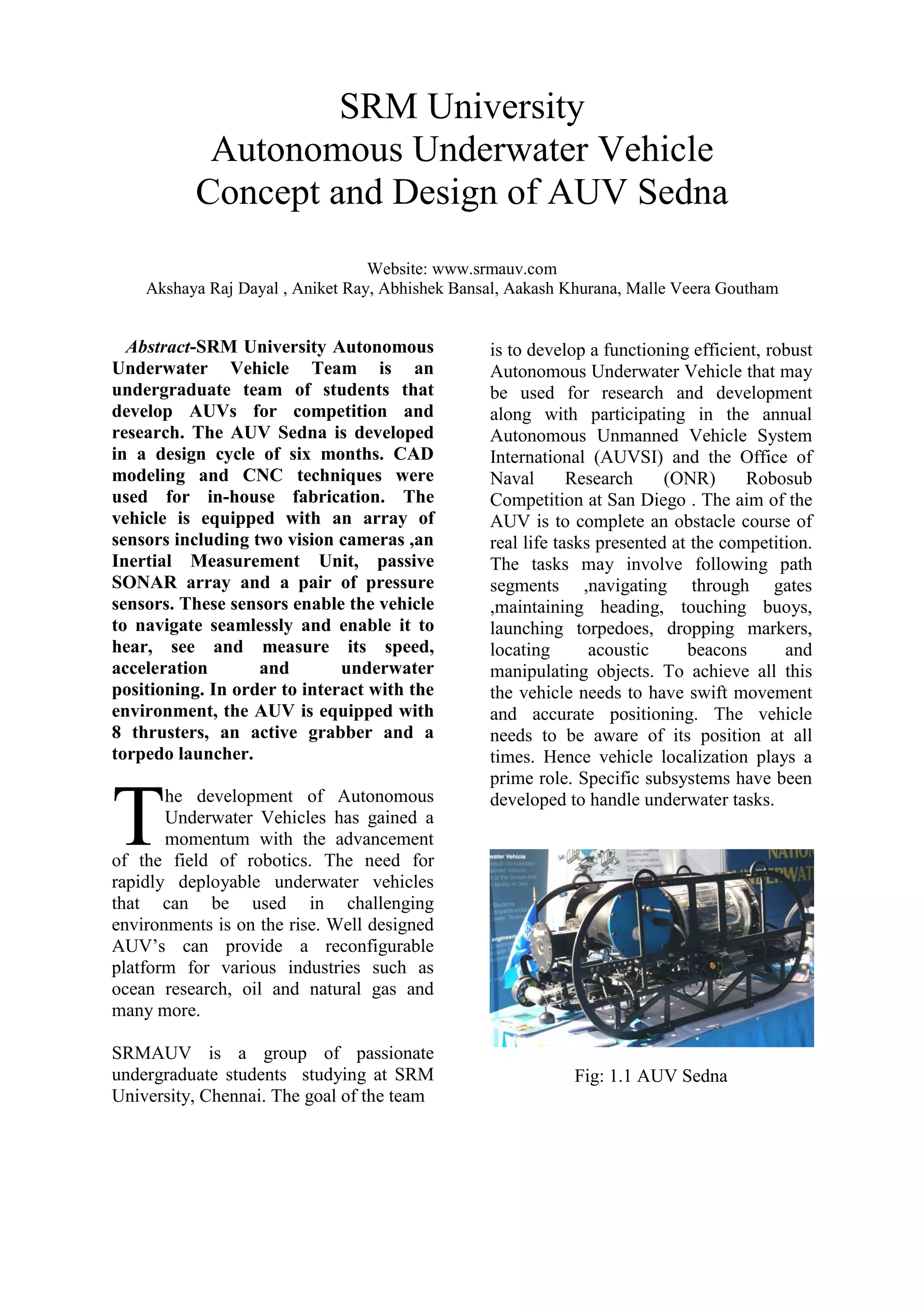
SRM University Autonomous Underwater Vehicle Team developed an autonomous underwater vehicle called Sedna over a six month period. Sedna is equipped with sensors like cameras, an inertial measurement unit, and pressure sensors to navigate autonomously. It also has thrusters, a grabber, and torpedo launcher to interact with its environment. The team's goal is to develop an efficient, robust AUV to use for research and compete in international competitions involving tasks like following paths and dropping objects.