The document outlines a project on the design and development of an autonomous mobile robotic arm aimed at performing tasks in various industries with minimal human intervention. It emphasizes the importance of path planning, computer vision, and kinematics in ensuring the robot can operate efficiently and safely in different environments. The project includes objectives such as CAD modeling, simulation, and the integration of sensors for object detection and motion control.














![W. Zhiqiang and L. Jun, "A review of object detection based on convolutional network," 2017 36th Chinese Control Conference (CCC), Dalian,
na, 2017, pp. 11104-11109, doi: 10.23919/ChiCC.2017.8029130.
A. Womg, M. J. Shafiee, F. Li and B. Chwyl, "Tiny SSD: A Tiny Single-Shot Detection Deep Convolutional Neural Network for Real-Time Embedded
ject Detection," 2018 15th Conference on Computer and Robot Vision (CRV), Toronto, ON, Canada, 2018, pp. 95-101, doi:
1109/CRV.2018.00023.
Shafiee, Mohammad Javad, et al. "Fast YOLO: A fast you only look once system for real-time embedded object detection in video." arXiv
print arXiv:1709.05943 (2017).
R. Leinhart and J. Maydt, “An extended set of haar-like features for rapid object detection”, in Proc. ICIP, 2002, vol.1, pp. 900 -910.
R. Leinhart and J. Maydt, “An extended set of haar-like features for rapid object detection”, in Proc. ICIP, 2002, vol.1, pp. 900 -910.
M. Nakashima, K. Yano, Y. Maruyama, and H. Yakabe, "The hot line work robot system phase ii and its human-robot interface mos", IEEE, vol. 2,
116-123, 1995.
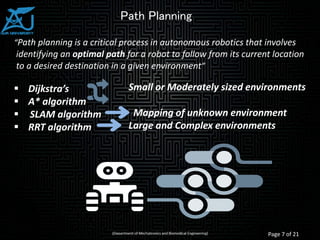
Karur, K.; Sharma, N.; Dharmatti, C.; Siegel, J.E. A Survey of Path Planning Algorithms for Mobile Robots. Vehicles 2021, 3, 448-468.
ps://doi.org/10.3390/vehicles3030027
Xuexi Zhang, Jiajun Lai, Dongliang Xu, Huaijun Li, Minyue Fu, "2D Lidar-Based SLAM and Path Planning for Indoor Rescue Using Mobile Robots",
rnal of Advanced Transportation, vol. 2020, Article ID 8867937, 14 pages, 2020. https://doi.org/10.1155/2020/8867937
https://robotnik.eu/
] https://www.kuka.com/en-de/products/mobility/mobile-robots
] https://www.mobile-industrial-robots.com/mir-go-applications/robot-arms/astech-projects-robotic-lab-assistant/
] Craig, J. J. (2009). Introduction To Robotics: Mechanics And Control, 3/E. India: Pearson Education.
] Islam, Raza Ul, et al. "An autonomous image-guided robotic system simulating industrial applications." 2012 7th International Conference on
tem of systems engineering (SoSE). IEEE, 2012.
] Iqbal, Jamshed, R. Ul Islam, and Hamza Khan. "Modeling and analysis of a 6 DOF robotic arm manipulator." Canadian Journal on Electrical and
ctronics Engineering 3.6 (2012): 300-306. 27 | P a g e
] Agustian, Indra, et al. "Robot Manipulator Control with Inverse Kinematics PD-Pseudoinverse Jacobian and Forward Kinematics Denavit
rtenberg." arXiv preprint arXiv:2103.10461 (2021).
References
Page 20 of 21](https://image.slidesharecdn.com/fyp-1-final-230428035148-cdefe4ba/85/Autonomous-Mobile-Robotic-Arm-pptx-21-320.jpg)