Download to read offline


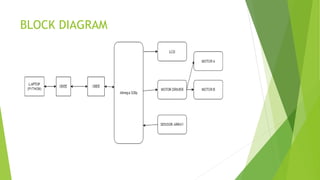
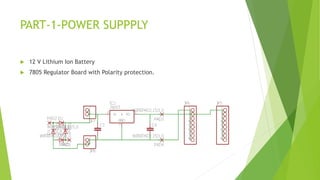








The document describes an autonomous restaurant service robot that is designed for fast, efficient, and autonomous food delivery. The robot uses a main processor board with an Atmega328p microcontroller interfaced with an LCD. It has a sensor array of 6 TCRT 5000 sensors for navigation and a motor driver and motors powered by a 12V lithium ion battery. The robot communicates with a laptop using an Xbee board and is controlled through Python and Arduino software. Future improvements include using a Raspberry Pi for voice recognition and connecting to the internet of things for remote monitoring and payment processing capabilities.