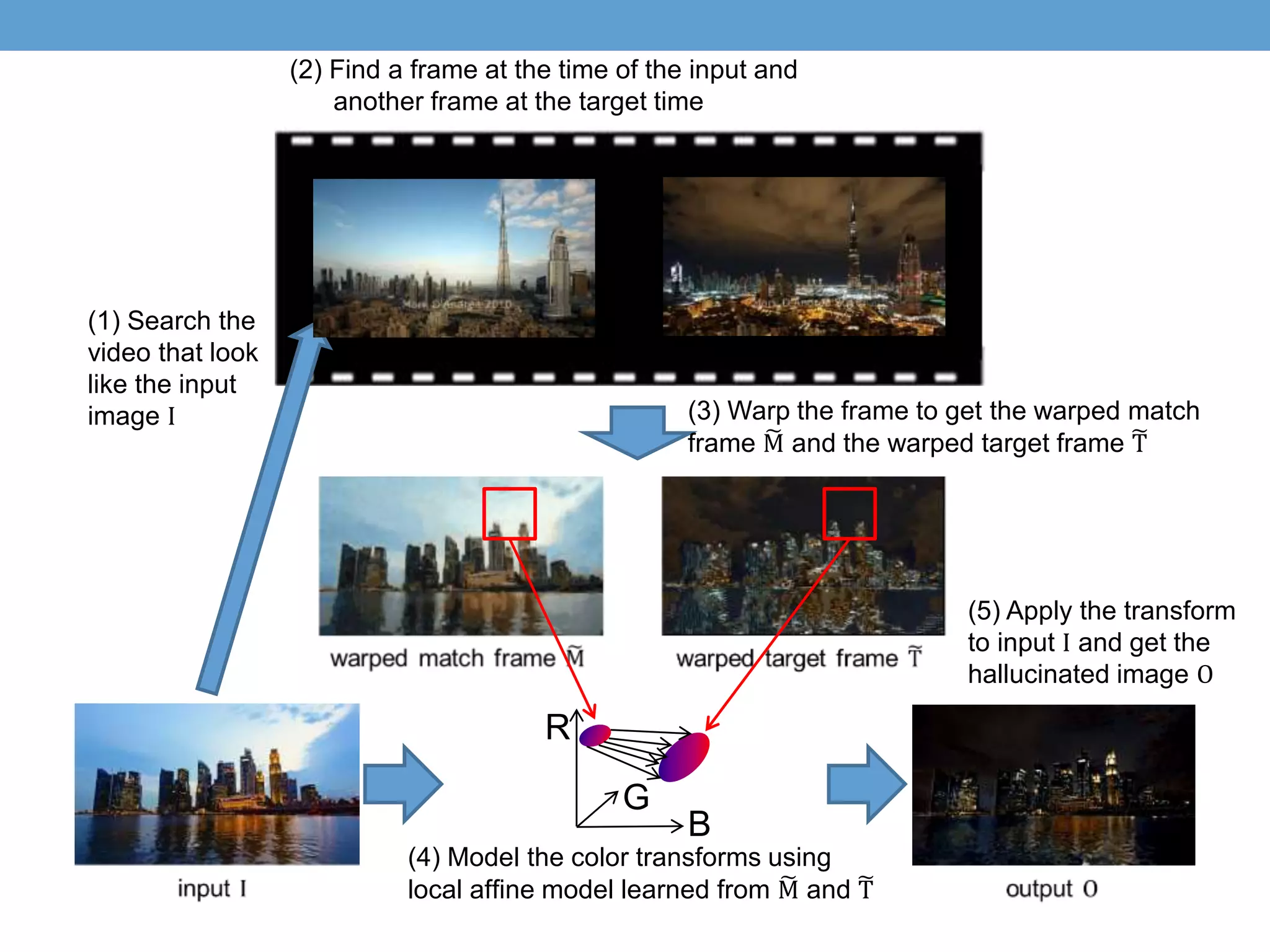
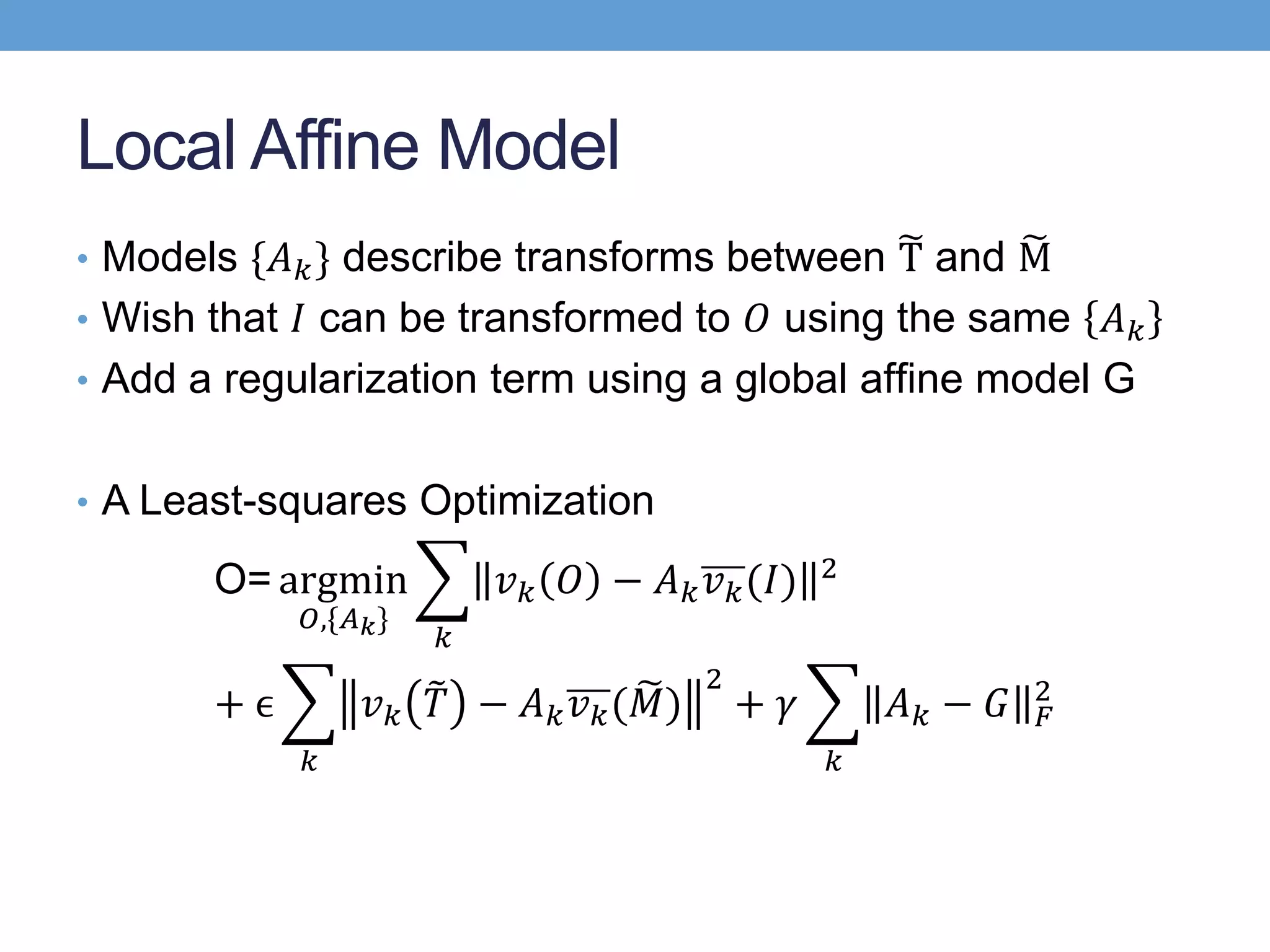
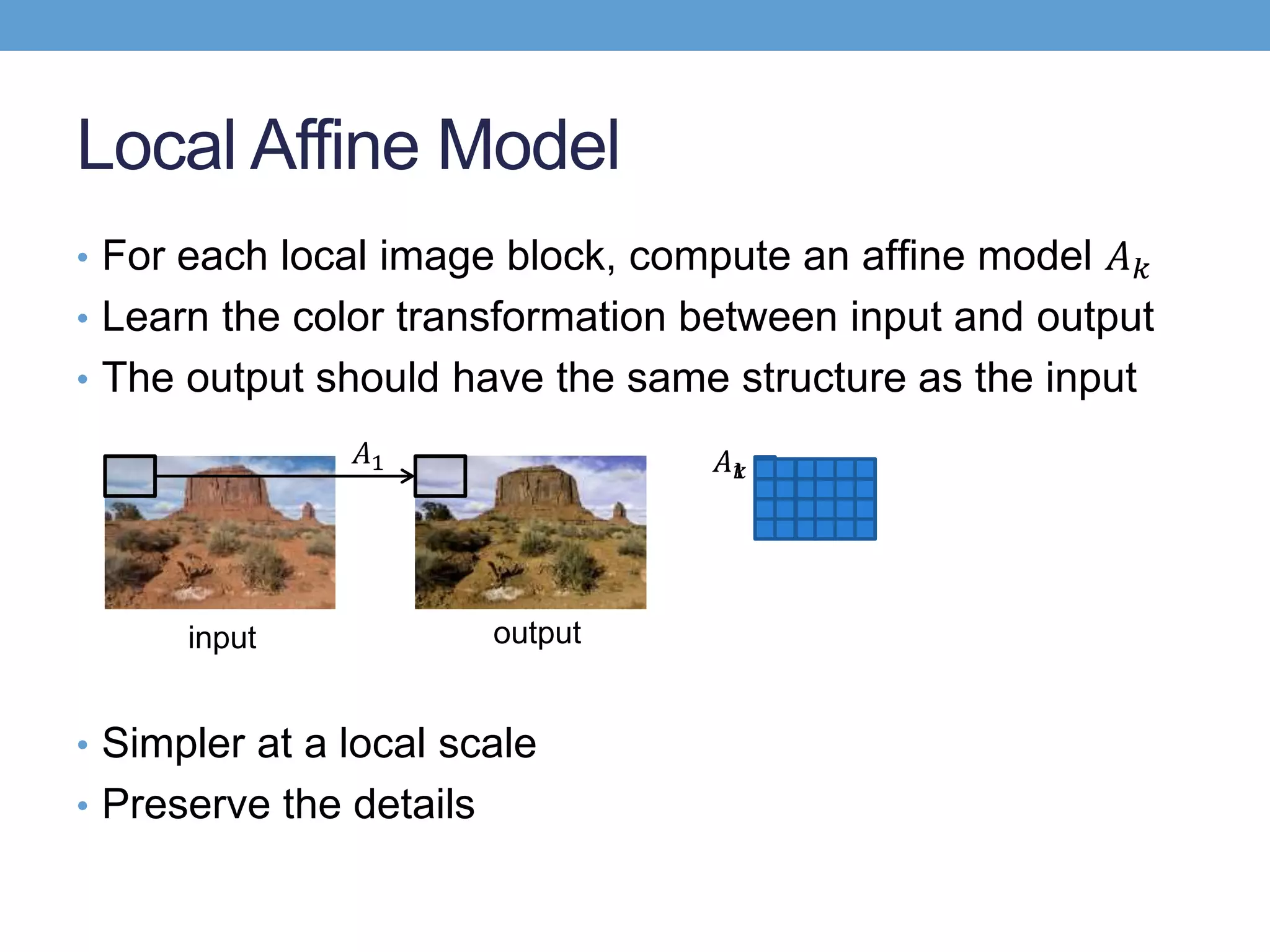
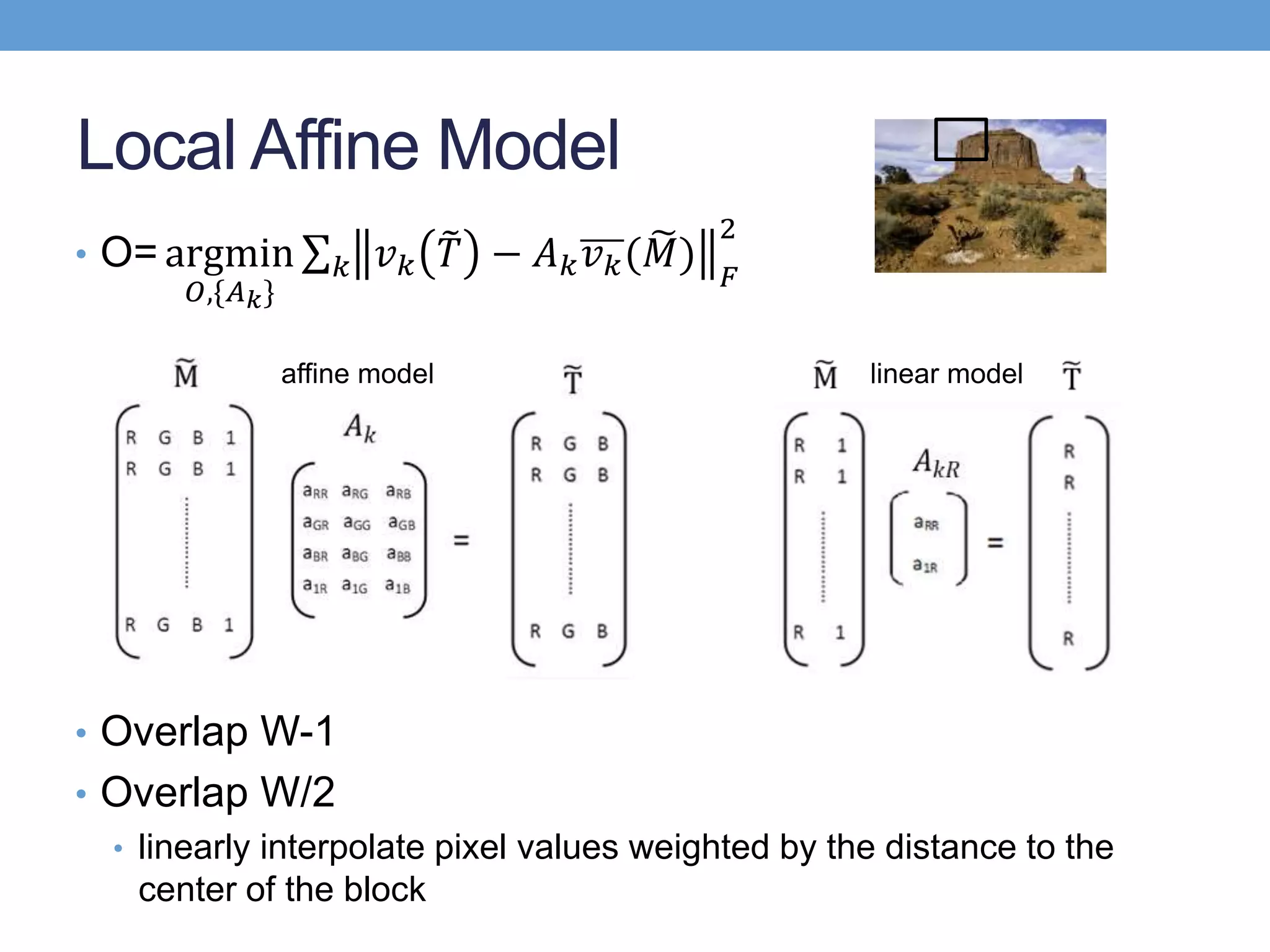
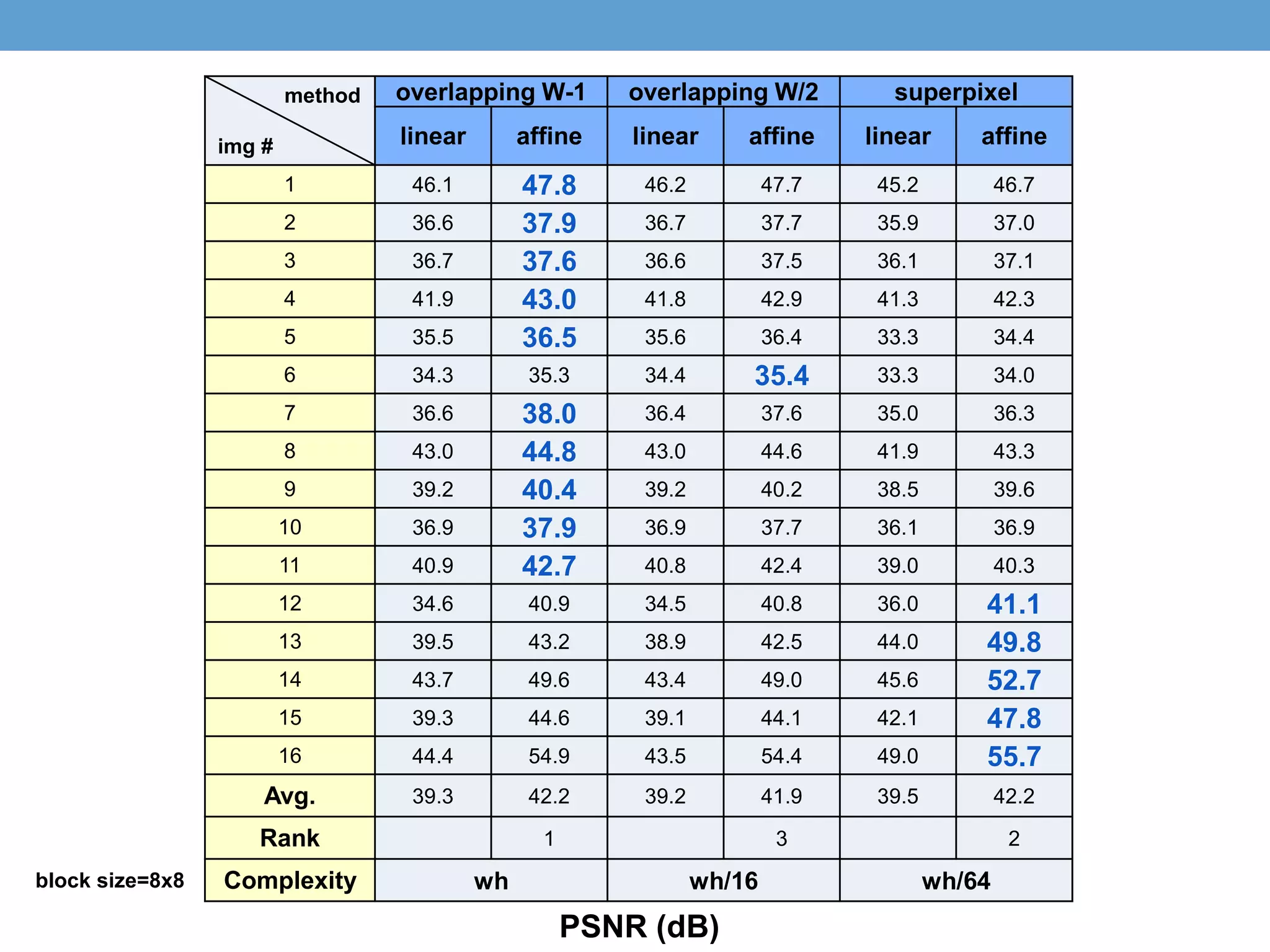
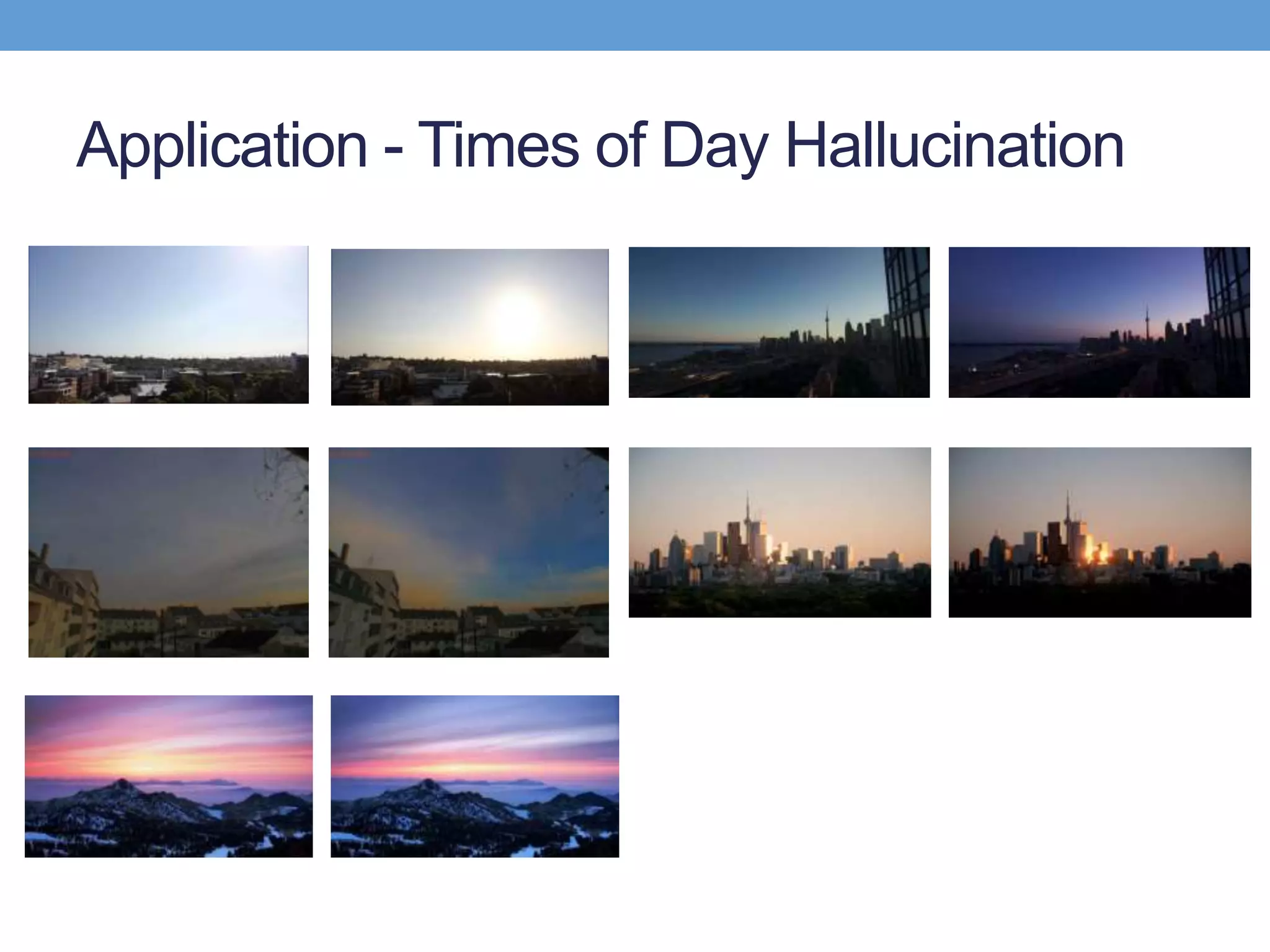
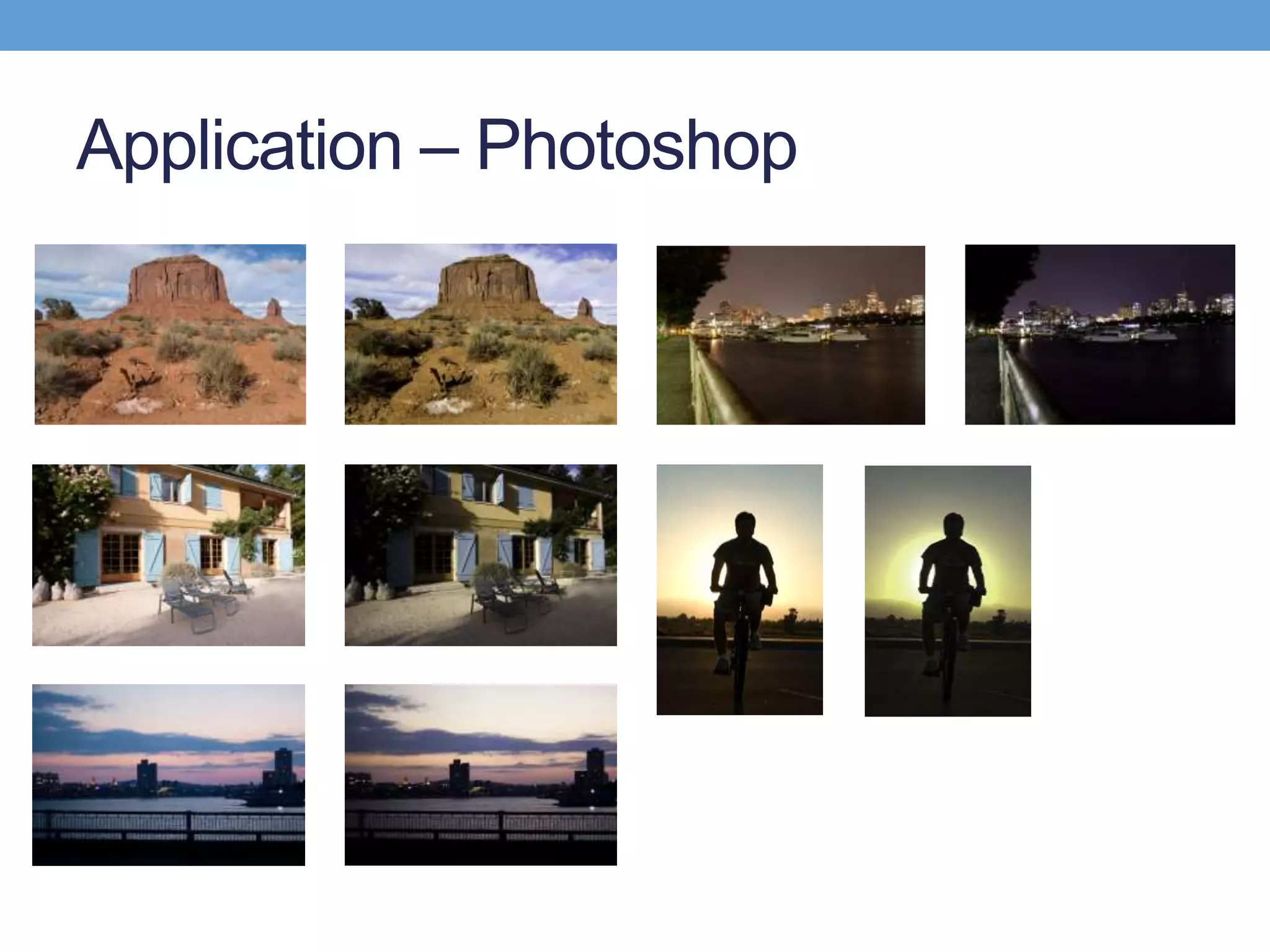
The document discusses several techniques for data-driven hallucination of different times of day from a single outdoor photo. It proposes using a local affine model to learn color transformations between frames from a matched video clip. The model is optimized using a least squares approach with regularization. It also discusses using superpixel segmentation and comparing performance of the local affine model versus a linear model.
![Image Decomposition
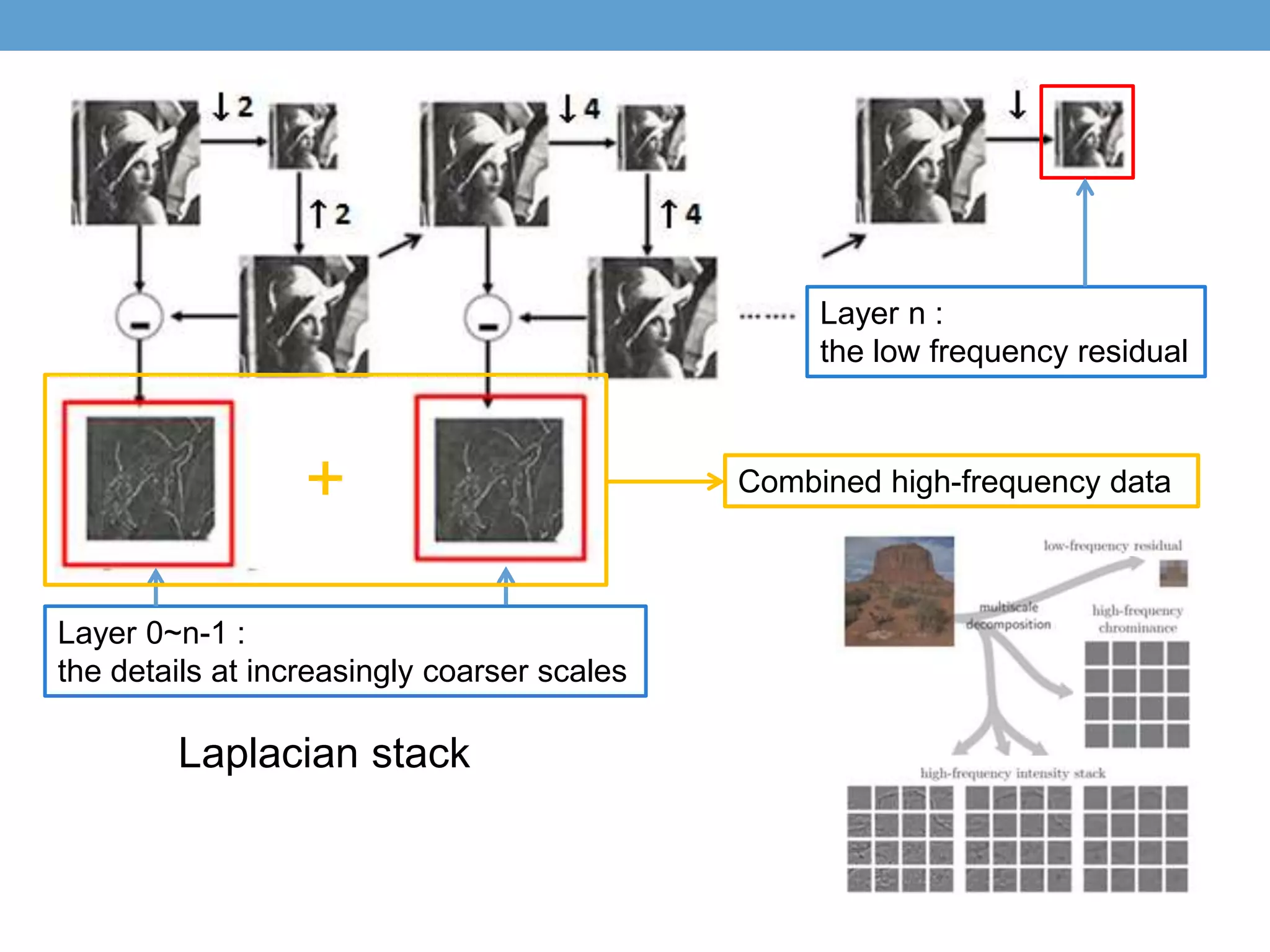
• Multi-scale decomposition
• Work in {𝑌, 𝐶 𝑏, 𝐶𝑟} color space
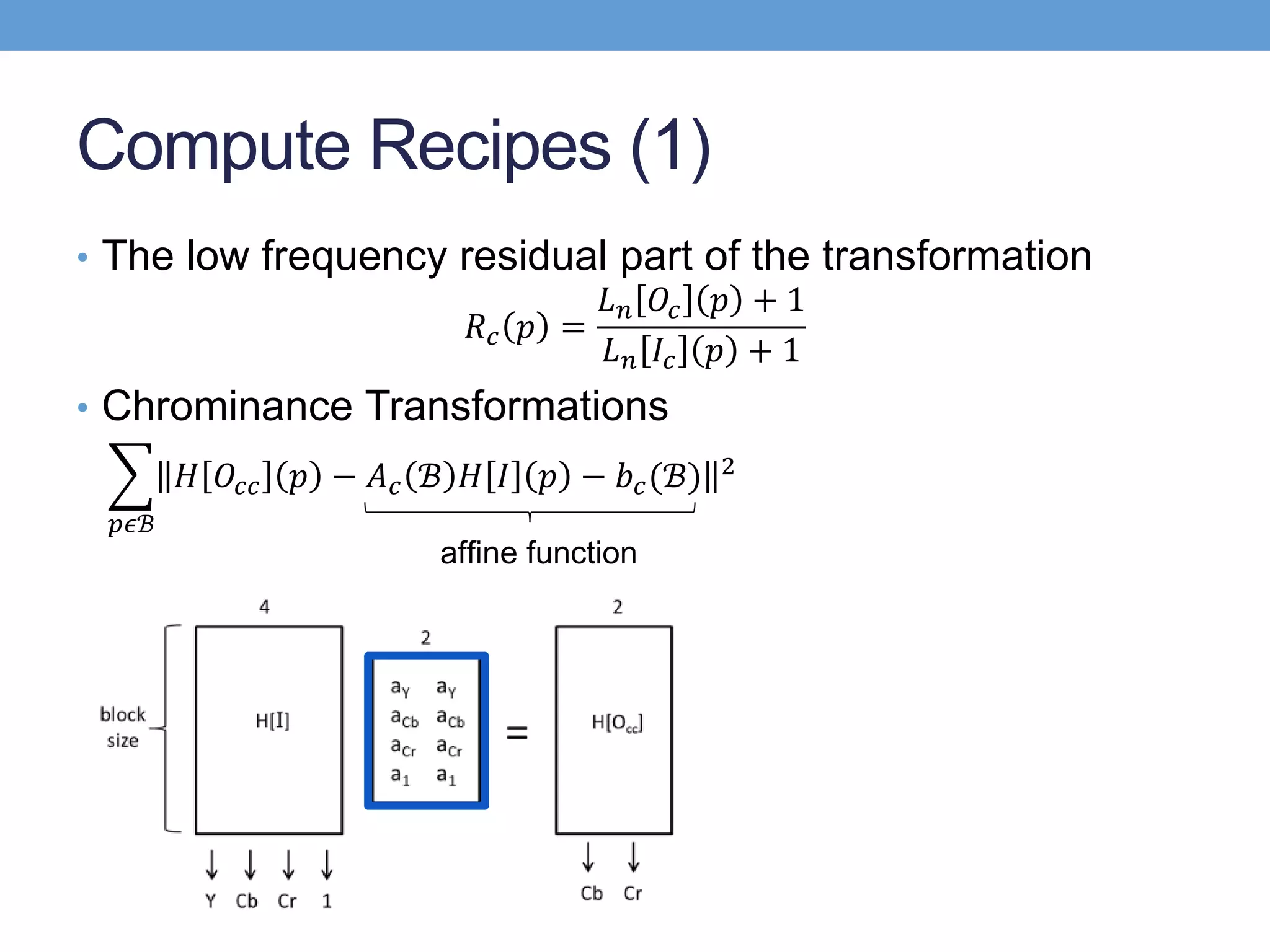
• Coarsely model the chrominance transformation and
sophisticatedly model the luminance transformation
• Split 𝐼 and 𝑂 into n + 1 levels 𝐿[𝐼] and 𝐿[𝑂]
• First n levels represent the details at increasingly coarser scales
• Last level is the low frequency residual which affects a large area
and affect significantly in final reconstruction
• Combined high-frequency data
H I = 𝑙=0
𝑛−1
𝐿𝑙[𝐼]](https://image.slidesharecdn.com/analysisoflocalaffinemodelv2-161222092250/75/Analysis-of-local-affine-model-v2-16-2048.jpg)
)
2
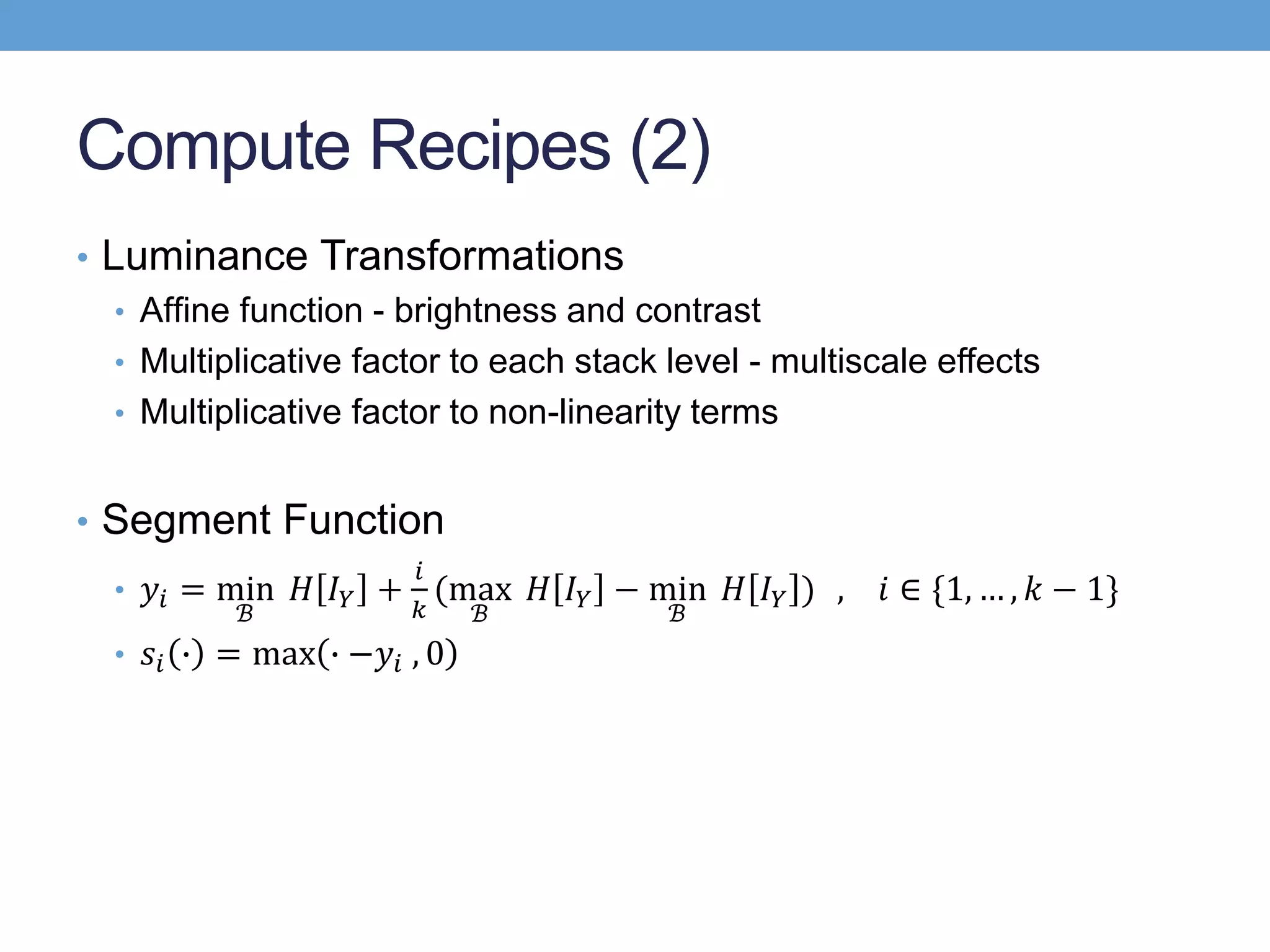
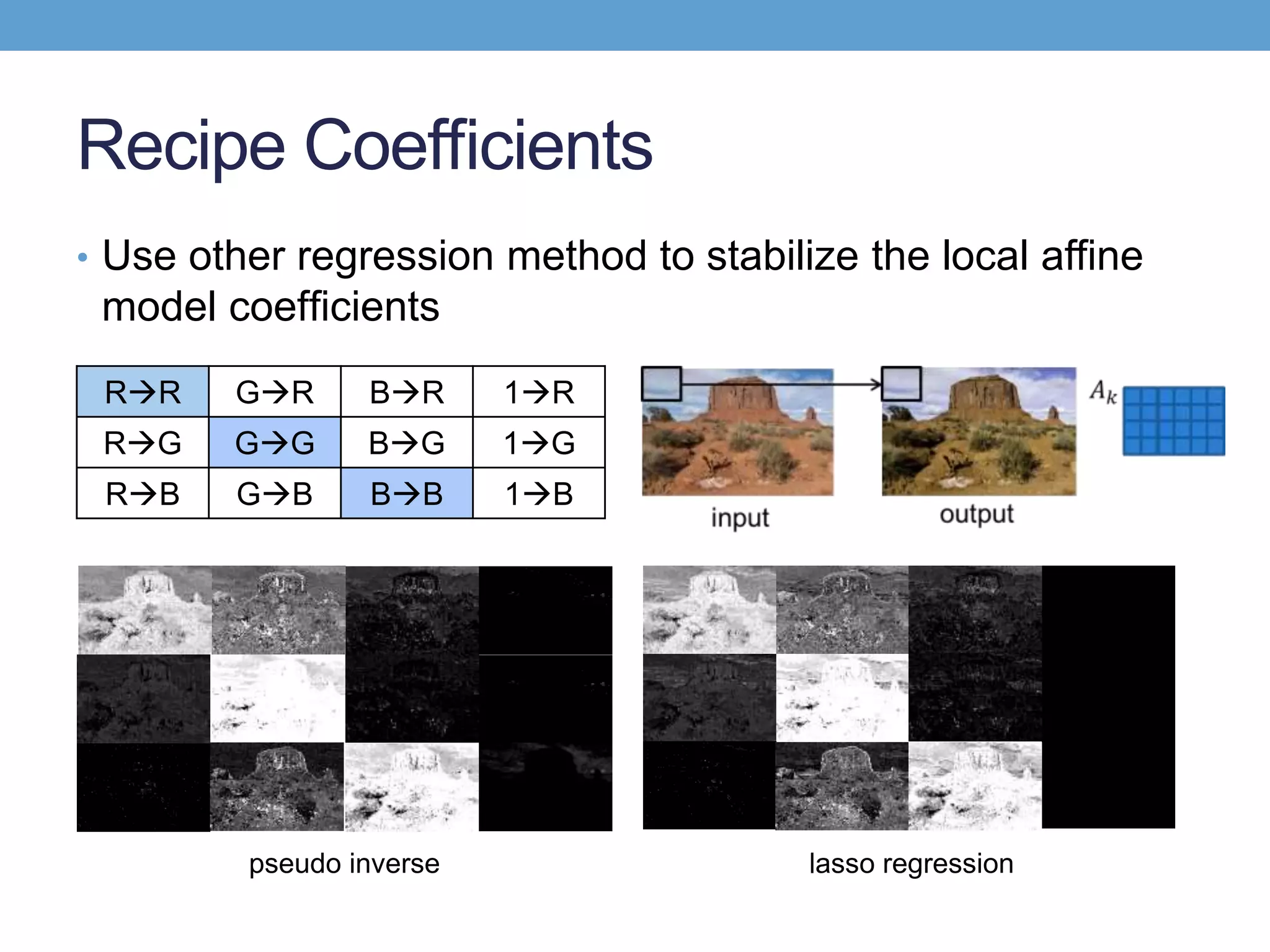
affine function multiplicative factor
to each stack level
multiplicative factor
to non-linearity terms](https://image.slidesharecdn.com/analysisoflocalaffinemodelv2-161222092250/75/Analysis-of-local-affine-model-v2-20-2048.jpg)
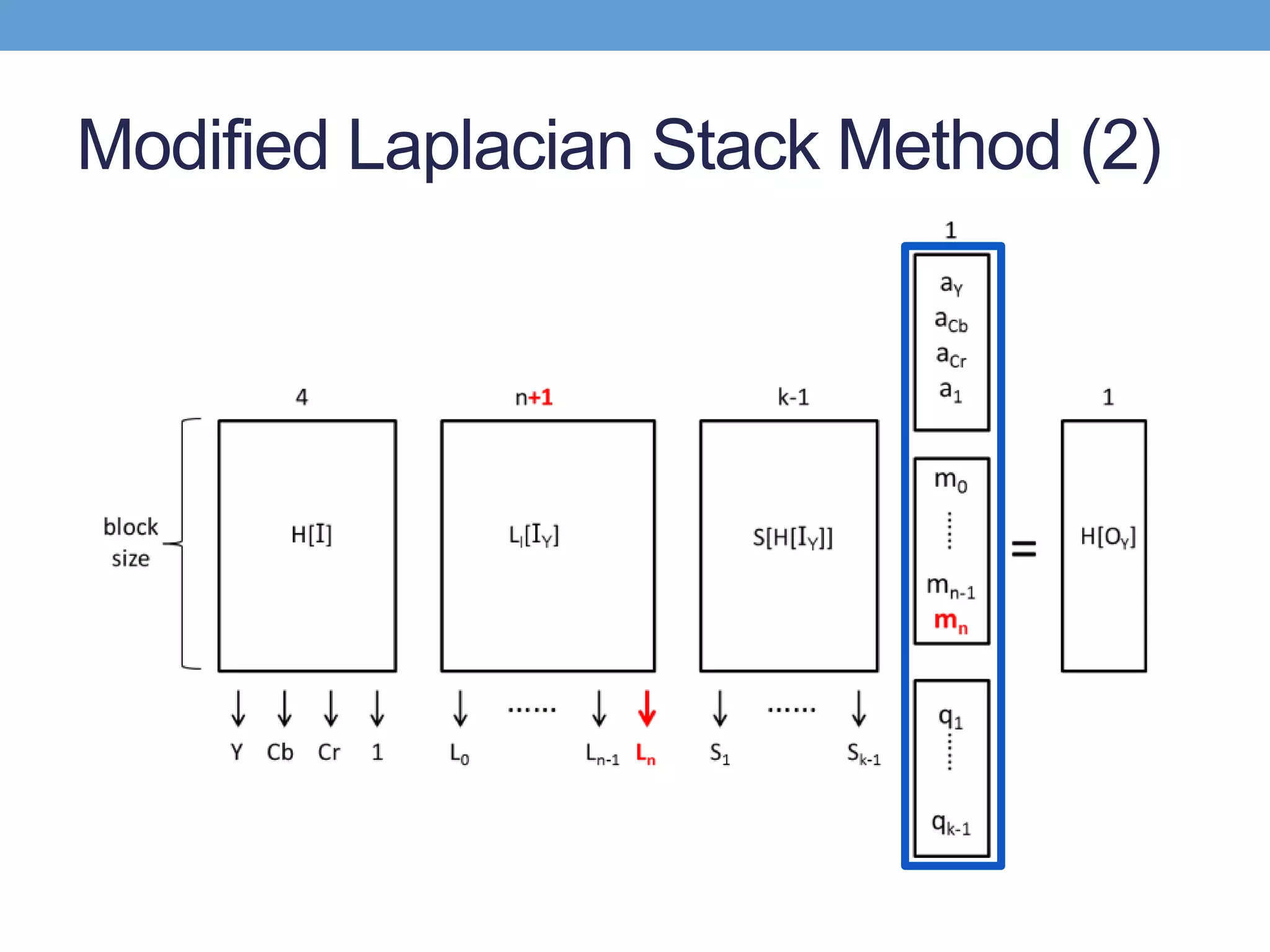
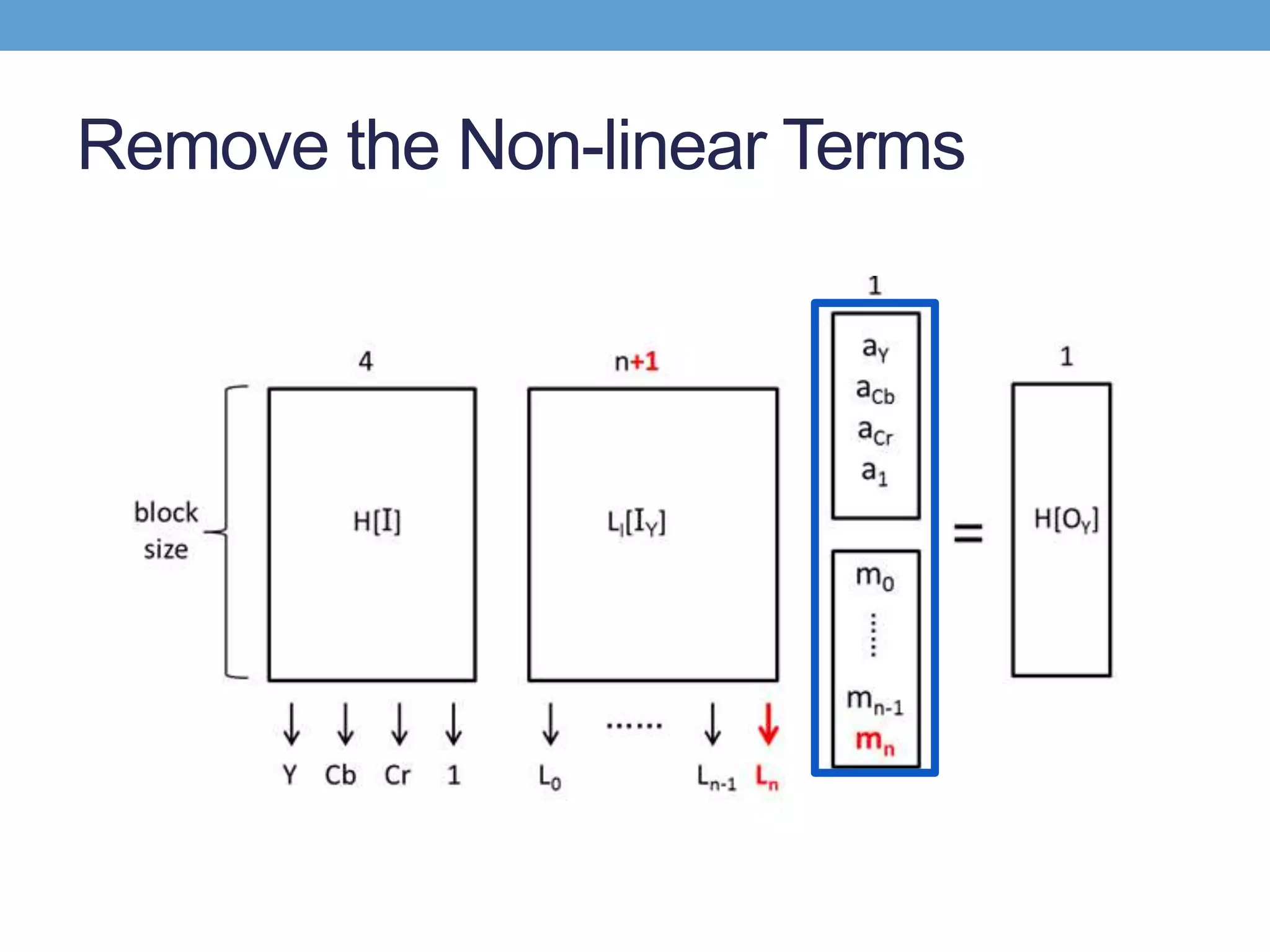
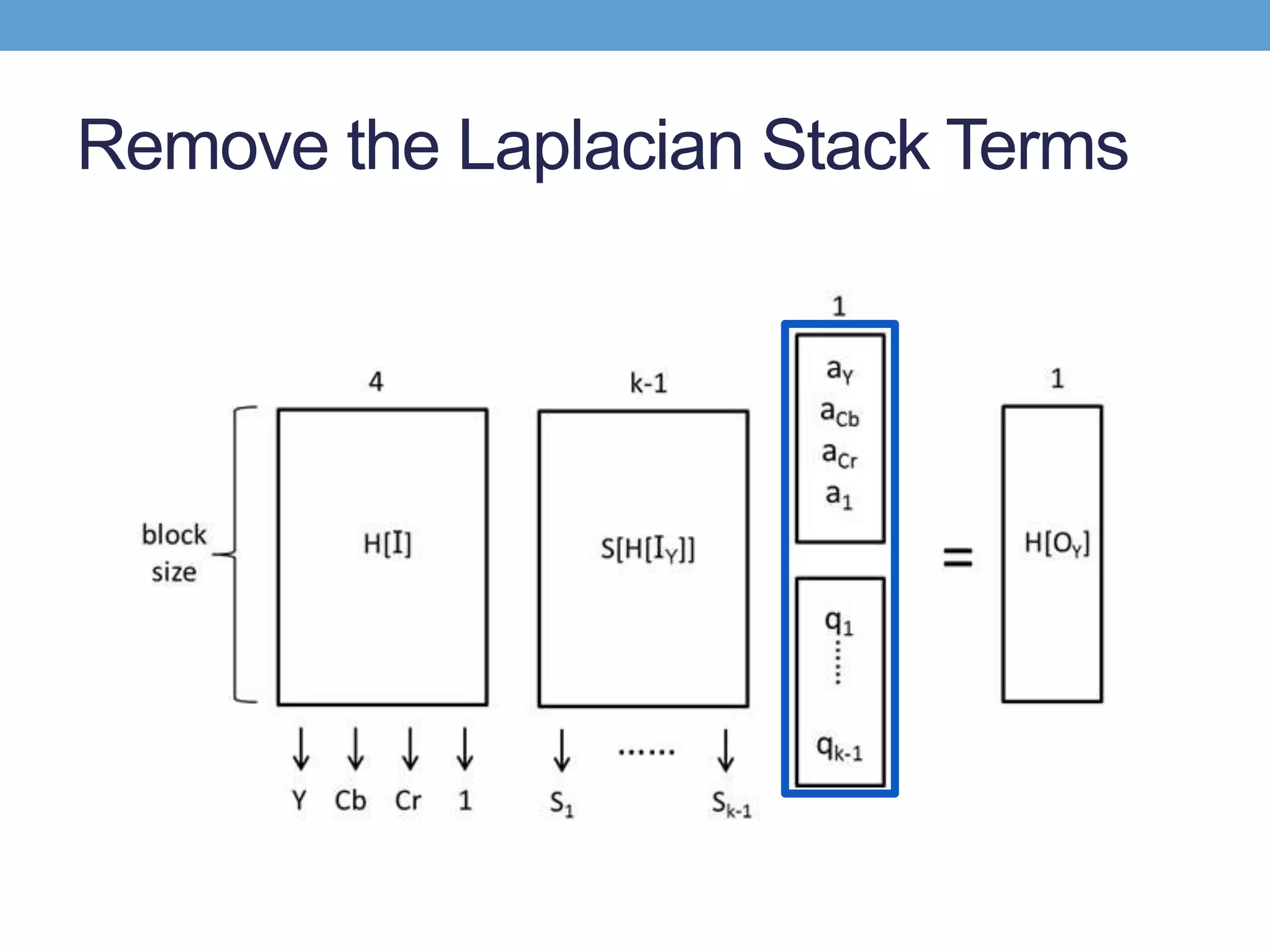
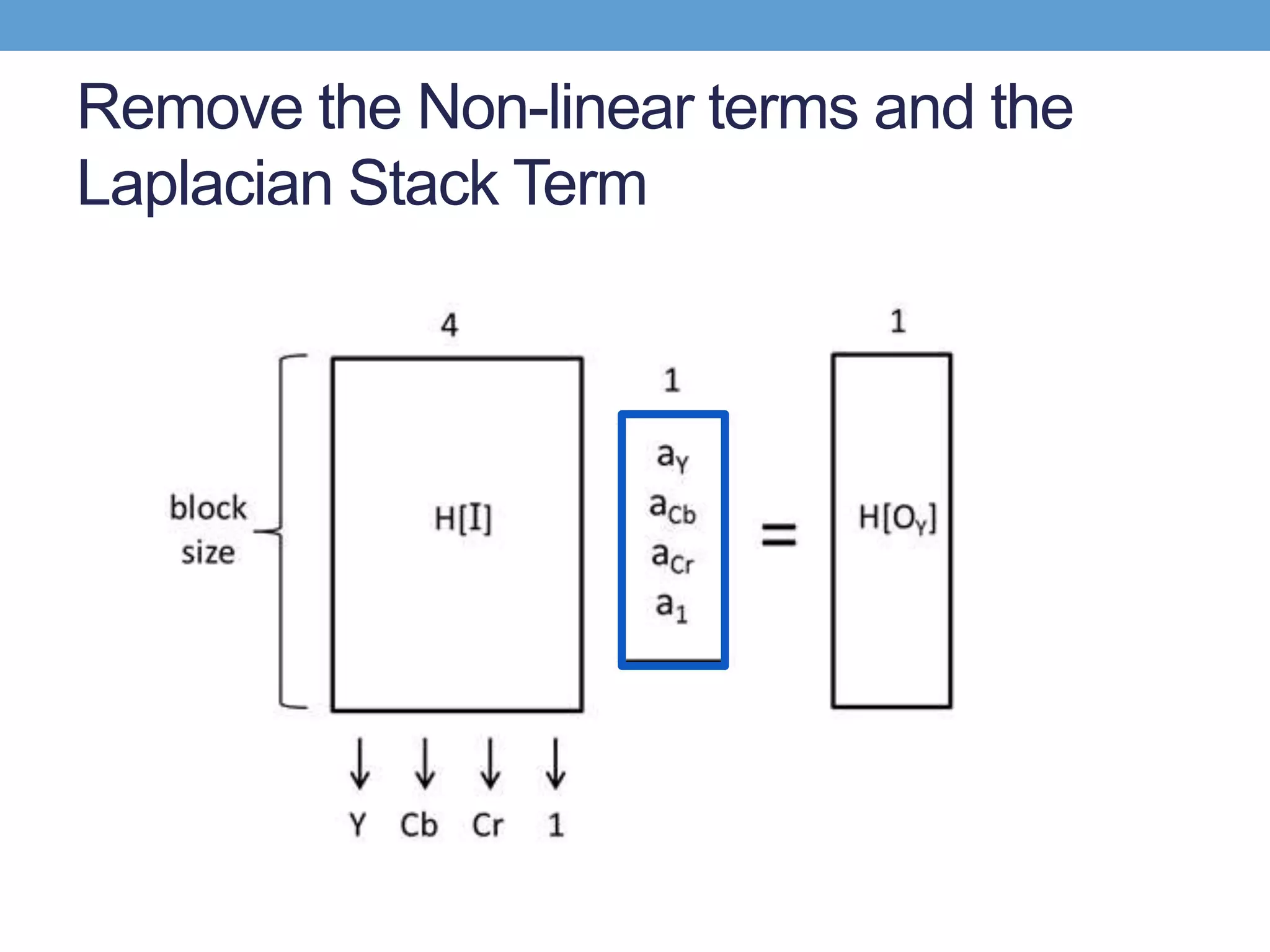
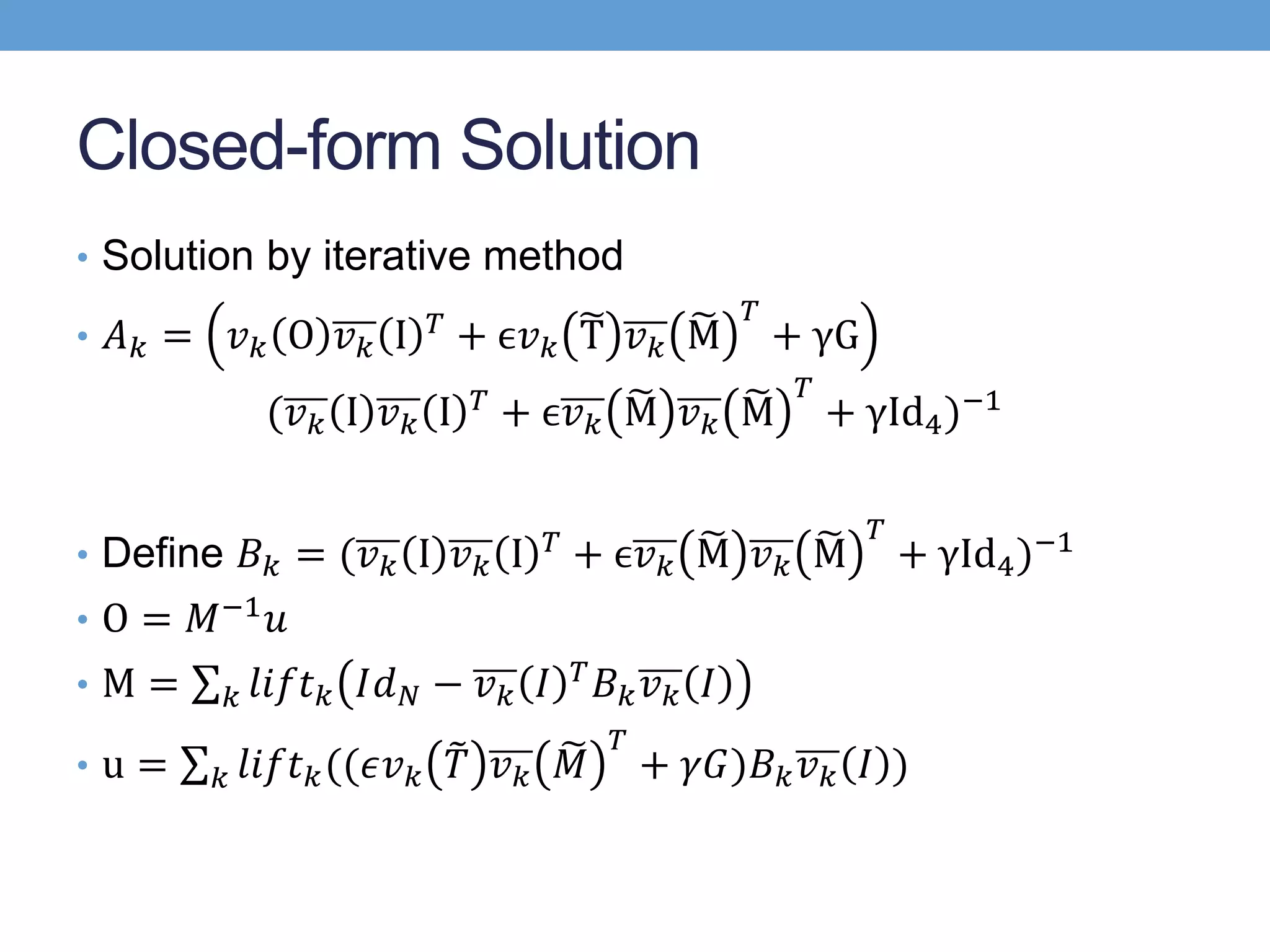
 + 1 − 1
• 𝐻ℬ O 𝑐𝑐 p = 𝐴 𝑐 ℬ 𝐻 𝐼 𝑝 + 𝑏 𝑐(ℬ)
• 𝐻ℬ O 𝑌 p = 𝐴 𝑌 ℬ 𝐻 𝐼 𝑝 + 𝑏 𝑌 ℬ +
𝑙=0
𝑛−1
𝑚𝑙 ℬ 𝐿𝑙 𝐼 𝑌 𝑝 + 𝑖=1
𝑘−1
𝑞𝑖(ℬ)𝑠𝑖(𝐻[𝐼 𝑌](𝑝))
• O = up L 𝑛 + H O 𝑐𝑐 + H[O 𝑌]
• Up-sample the low residual term
• Linearly interpolate other terms](https://image.slidesharecdn.com/analysisoflocalaffinemodelv2-161222092250/75/Analysis-of-local-affine-model-v2-22-2048.jpg)
![• H I = 𝑙=0
𝑛
𝐿𝑙[𝐼]
• Remove the low frequency residual
• Add a layer in laplacian stack and the high frequency term
Modified Laplacian Stack Method (1)
Layer 0~n-1
Layer n
Combined high-frequency data+](https://image.slidesharecdn.com/analysisoflocalaffinemodelv2-161222092250/75/Analysis-of-local-affine-model-v2-28-2048.jpg)
![Reference
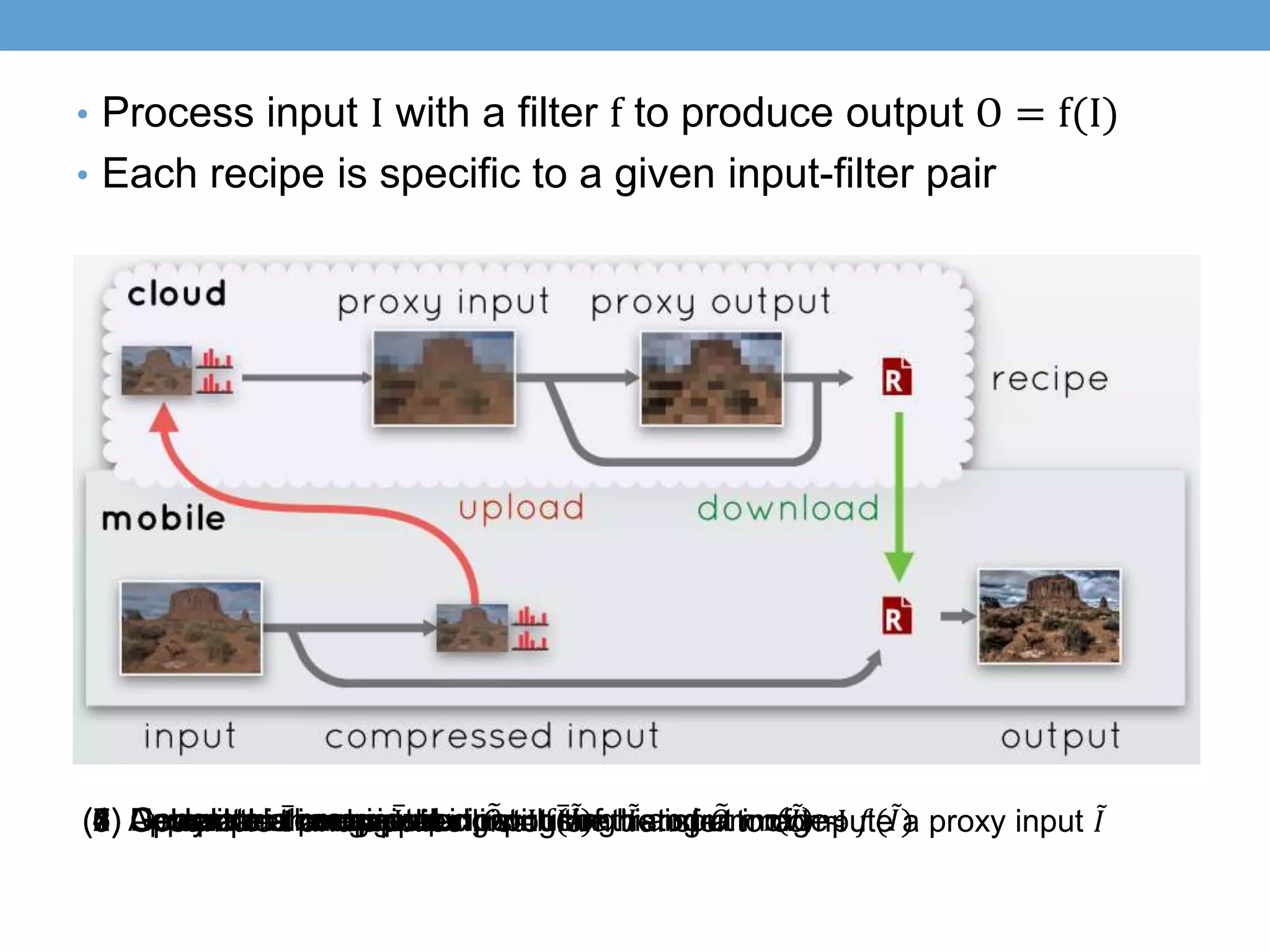
[1] Transform Recipes for Efficient Cloud Photo Enhancement
Michaël Gharbi, YiChang Shih, Gaurav Chaurasia,
Jonathan Ragan-Kelley, Sylvain Paris, Frédo Durand
SIGGRAPH ASIA 2015
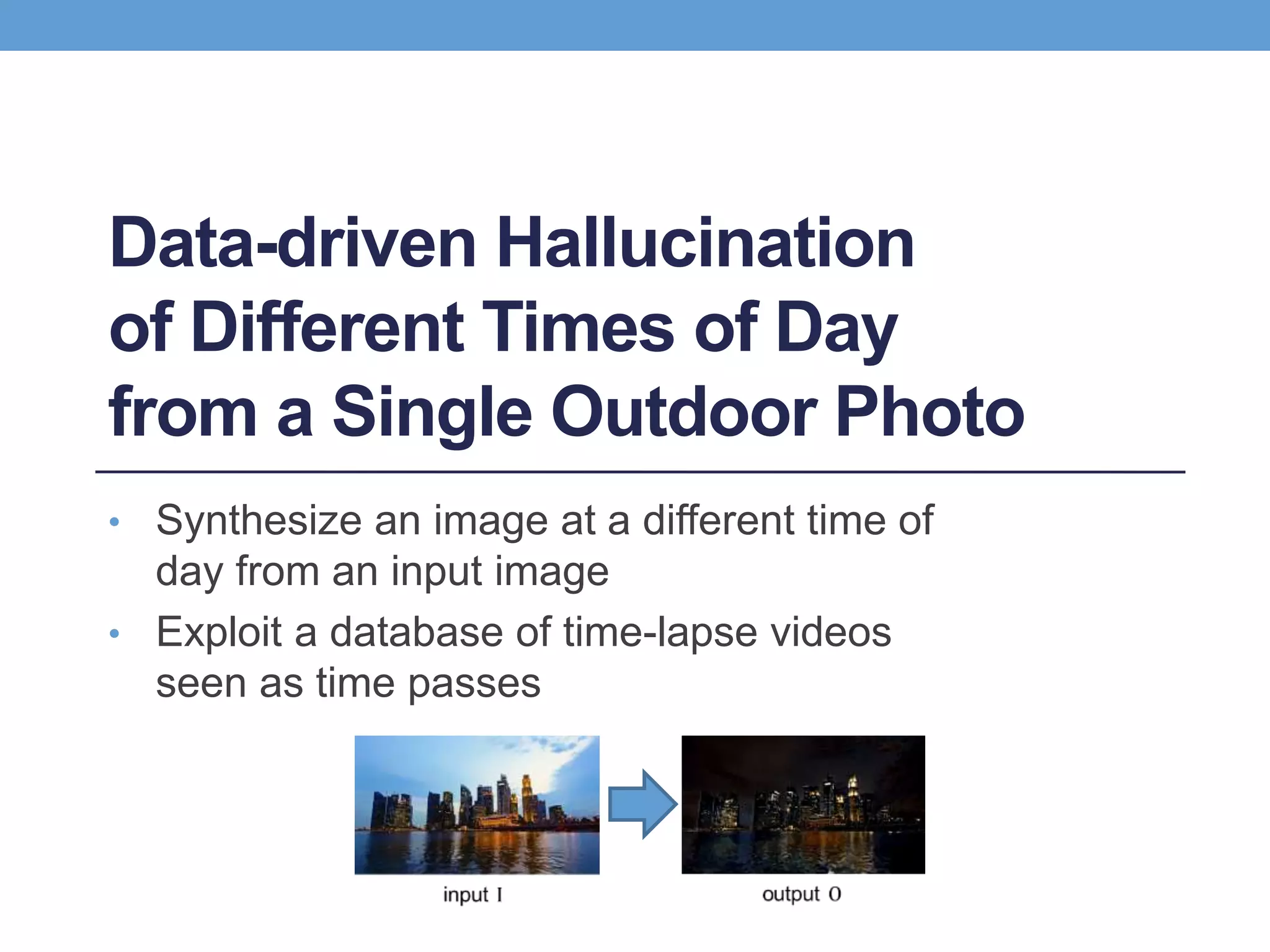
[2] Data-driven Hallucination for Different Times of Day from a Single
Outdoor Photo
YiChang Shih, Sylvain Paris, Frédo Durand, William T. Freeman
SIGGRAPH ASIA 2013
[3] SLIC Superpixels Compared to State-of-the-art Superpixel Methods
Radhakrishna Achanta, Appu Shaji, Kevin Smith, Aurelien Lucchi,
Pascal Fua, and Sabine Susstrunk](https://image.slidesharecdn.com/analysisoflocalaffinemodelv2-161222092250/75/Analysis-of-local-affine-model-v2-38-2048.jpg)





































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)




