Downloaded 190 times





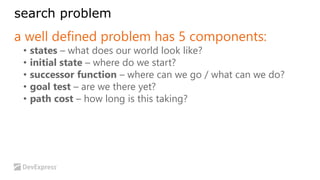
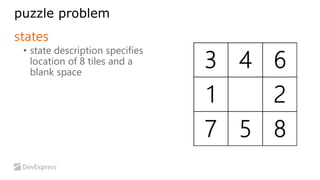
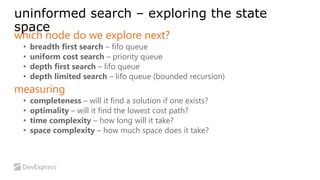
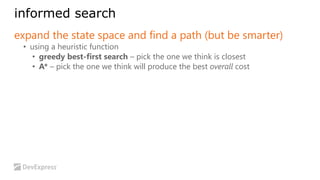
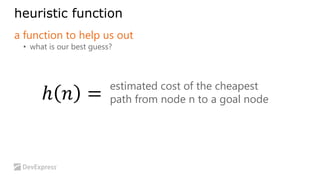
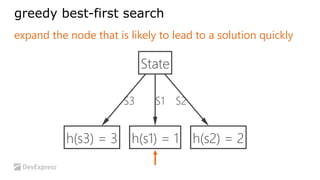
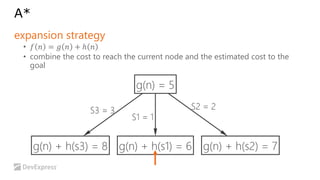
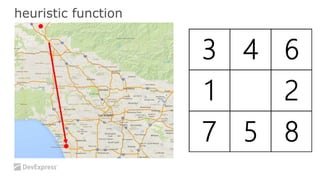

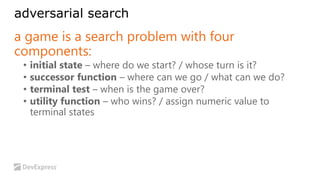
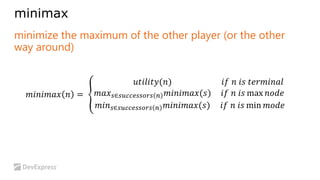
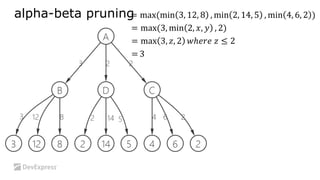



The document provides an introduction to artificial intelligence (AI) focusing on search algorithms and adversarial search techniques. It details various search strategies, including uninformed and informed search methods, as well as the minimax algorithm and alpha-beta pruning in game scenarios. The content emphasizes the importance of defining components of search problems and the use of heuristic functions for efficiency in finding solutions.



































































