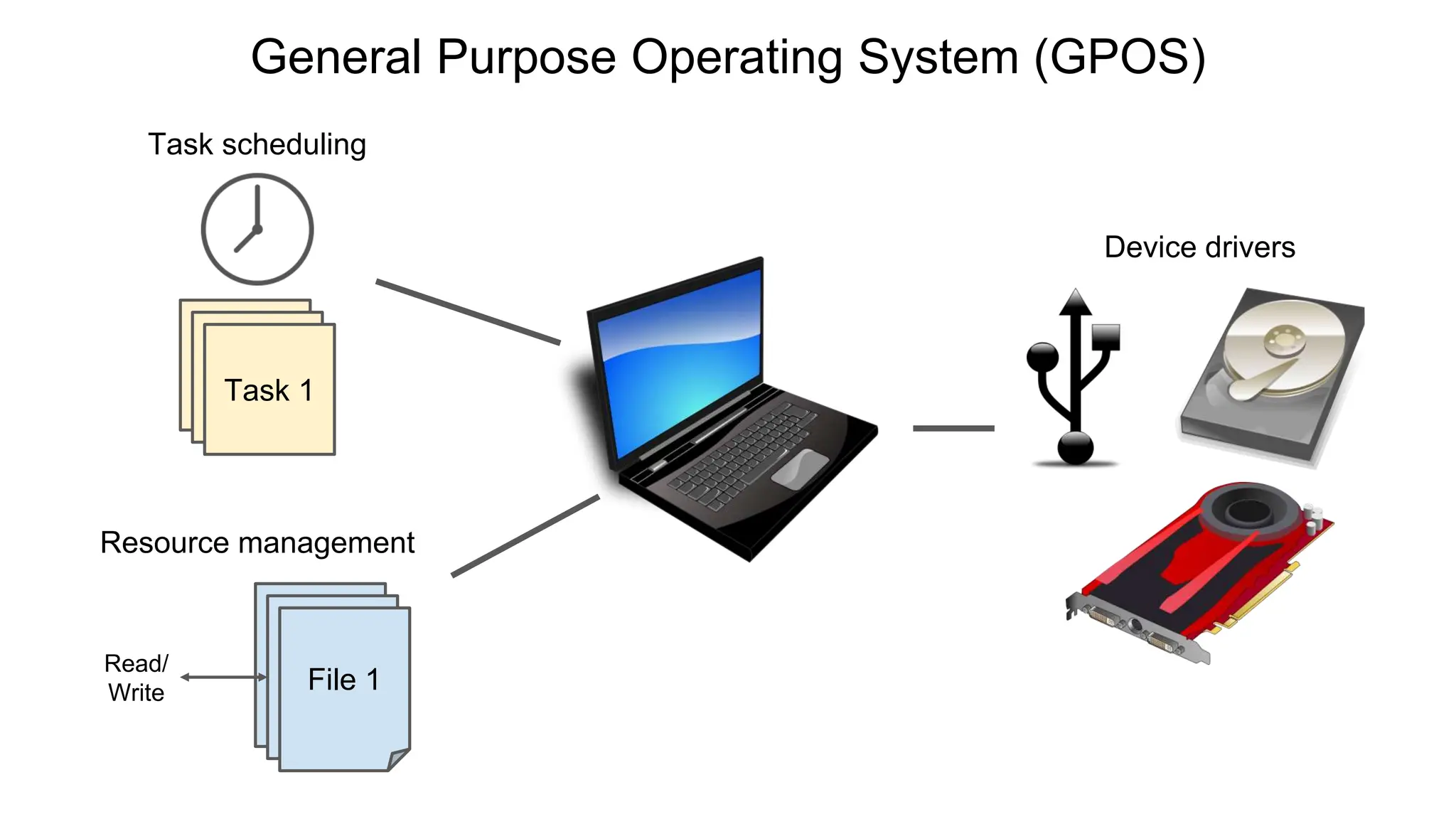
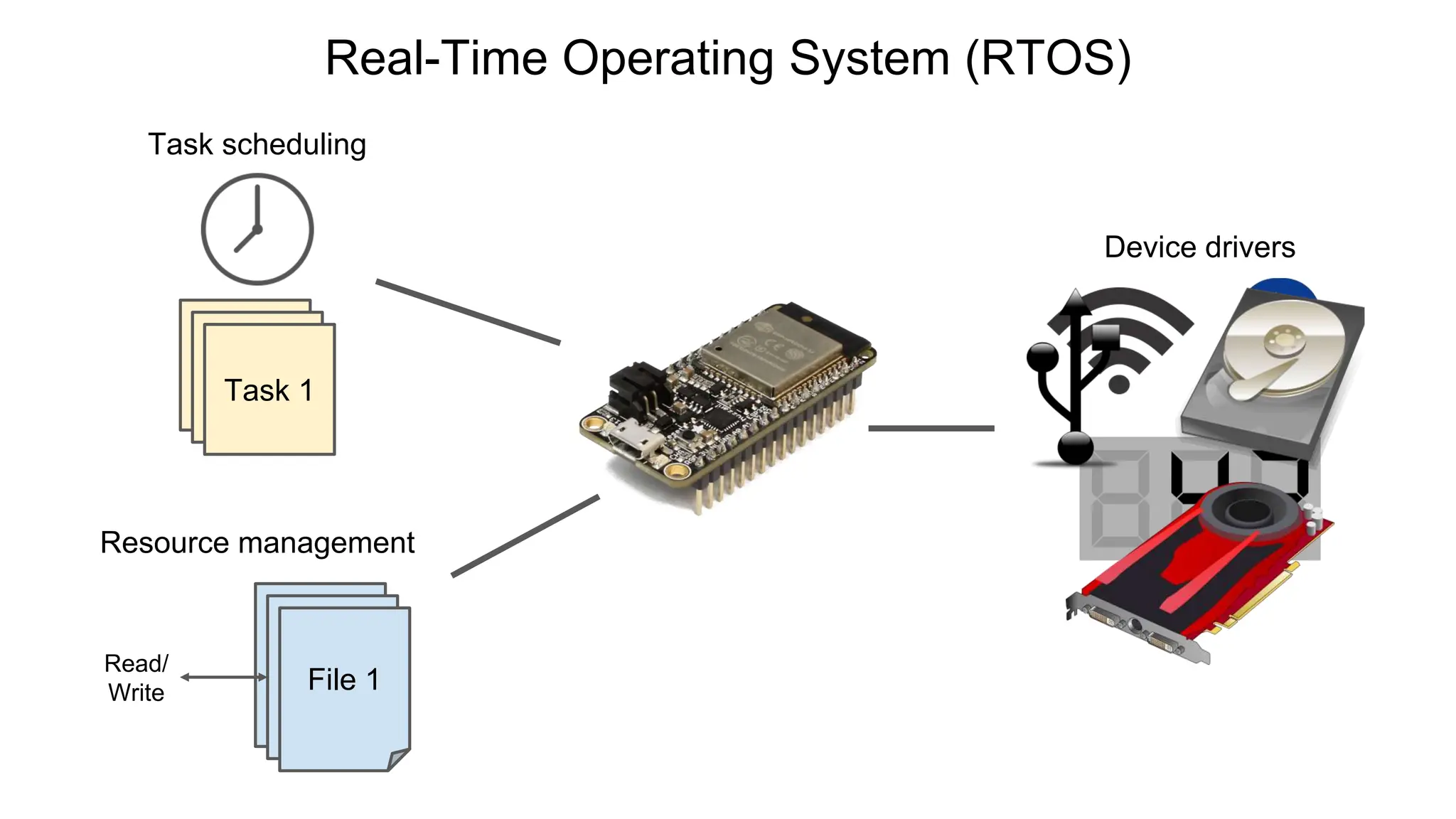
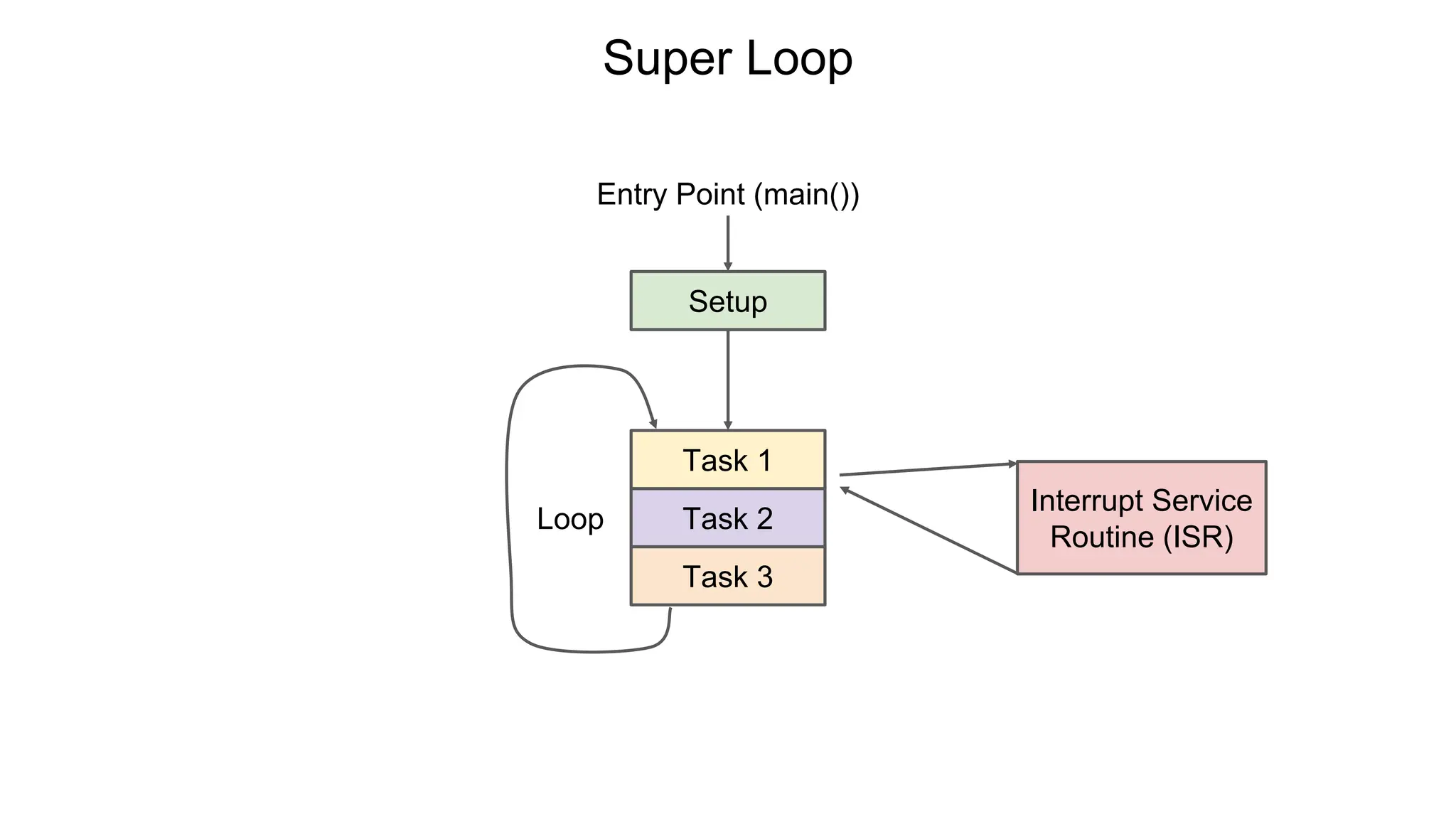
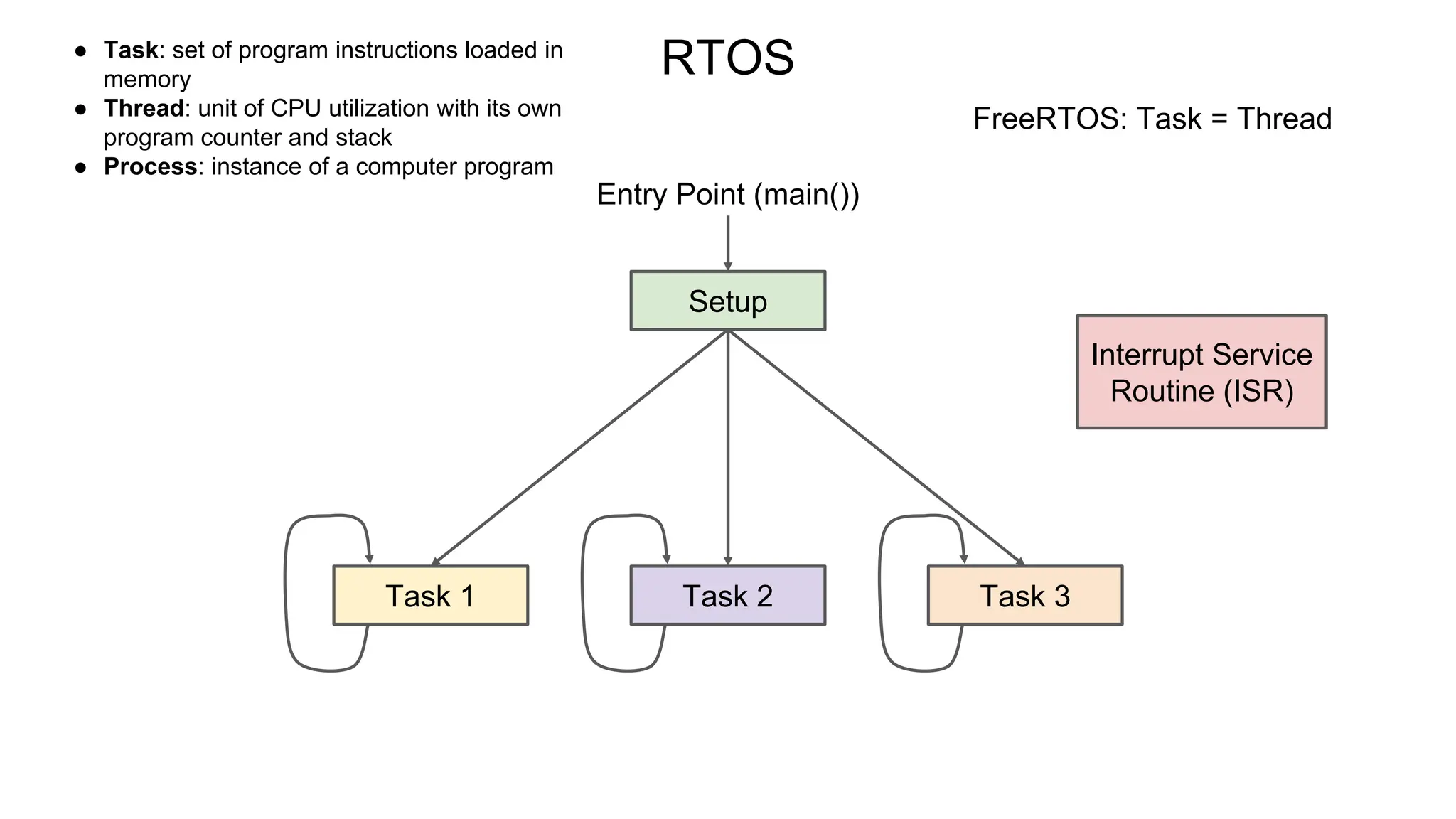
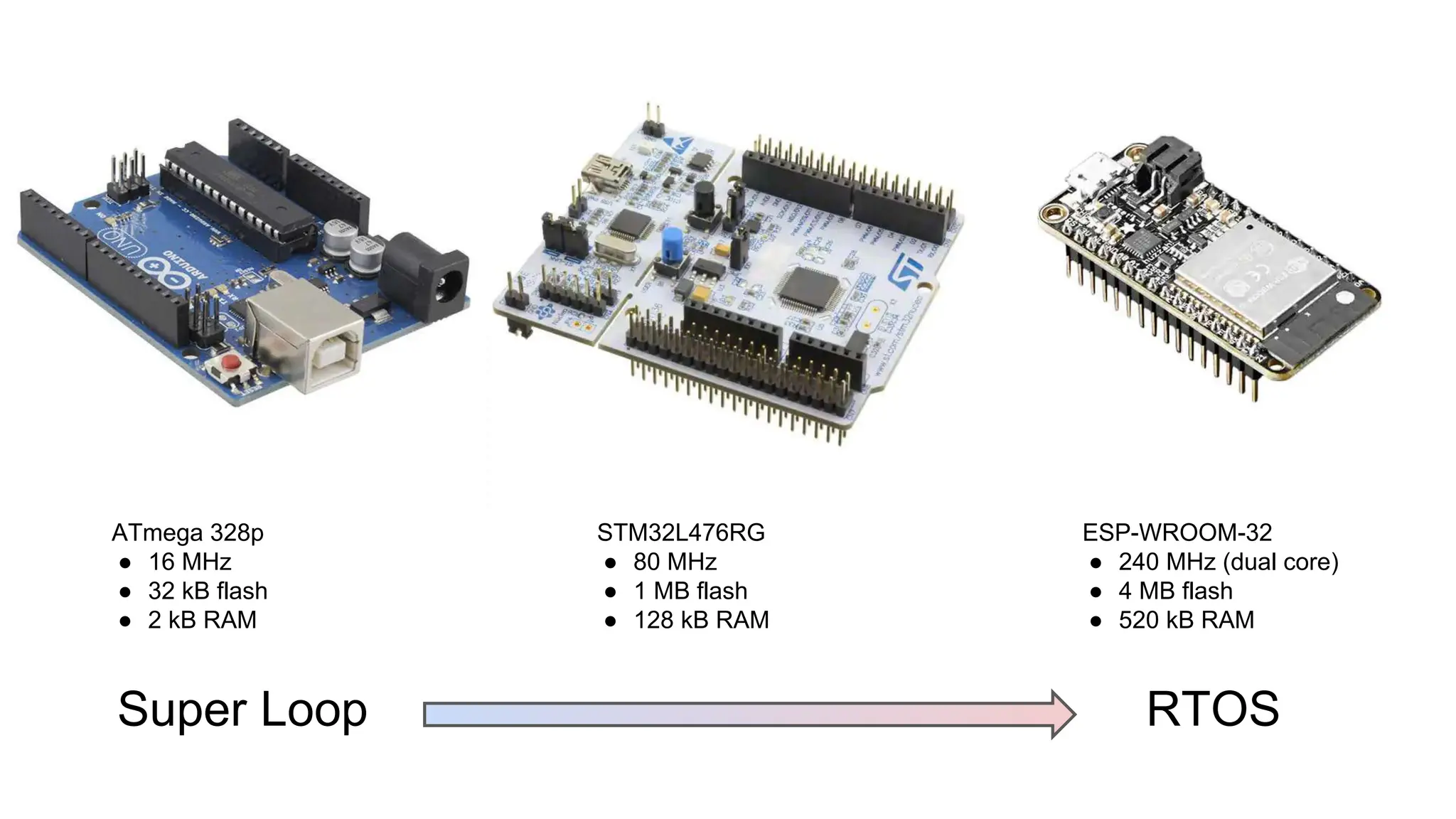
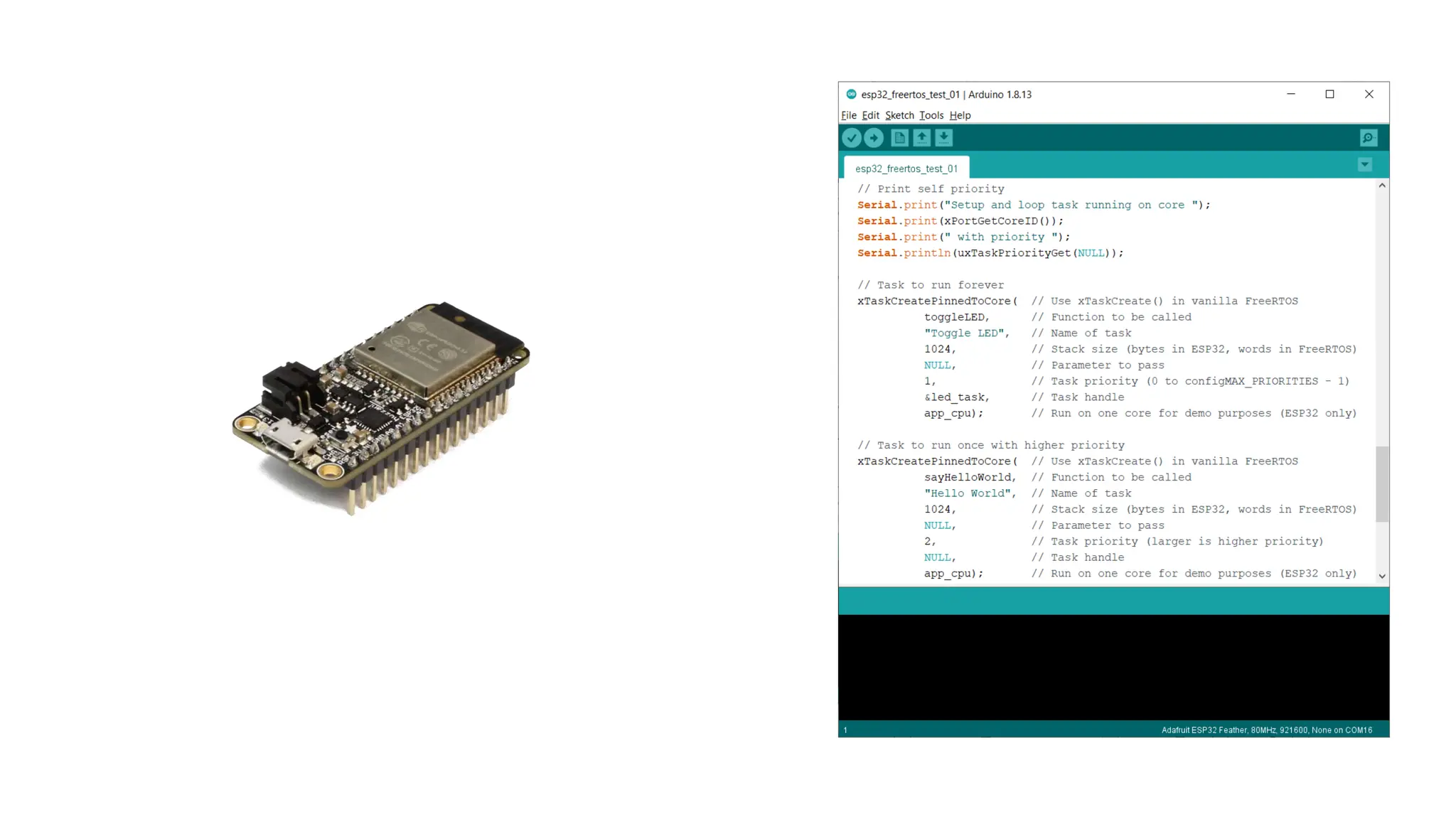
This document provides an introduction to real-time operating systems (RTOS) by comparing them to general purpose operating systems. It discusses key RTOS concepts like task scheduling, interrupt service routines, and resource management. It also gives examples of microcontrollers like the ATmega 328p, STM32L476RG, and ESP-WROOM-32 that are commonly used with RTOS and their specifications.