This document summarizes a student project that simulated the longitudinal dynamics of a Boeing 747 aircraft. The objectives were to simulate the short period and phugoid modes, calculate errors between exact and approximate solutions, and visualize the time histories. The key steps included:
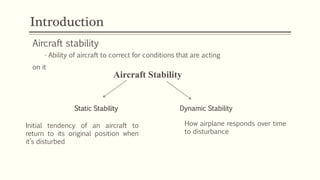
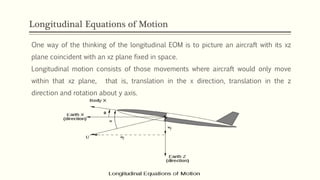
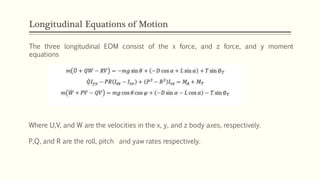
1) Developing mathematical models of the aircraft equations of motion and decoupling into longitudinal dynamics.
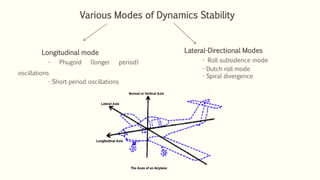
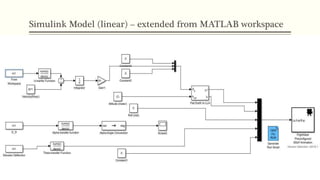
2) Creating a Simulink model to simulate the short period and phugoid modes.
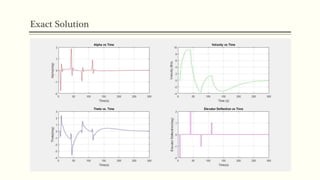
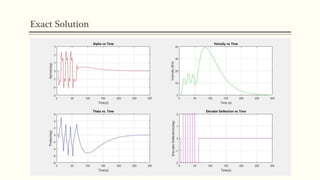
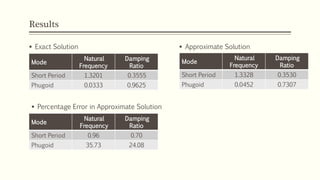
3) Calculating natural frequencies, damping ratios, and percentage errors between exact and approximate solutions.
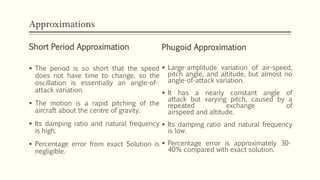
4) Visualizing the time histories of parameters like pitch angle and airspeed. The project concluded that short period approximations were accurate while phugoid approximations produced