More Related Content

PDF
MongoDB World 2018: Active-Active Application Architectures: Become a MongoDB... 
DOC
Sưu tầm các định nghĩa về thư viện số trên mạng hoặc tài liệu giấy 2019 
PDF
Lessons Learnt from Oracle Unified Directory implementation with Oracle E-Bus... 
PPTX
Apache Phoenix and Apache HBase: An Enterprise Grade Data Warehouse 
PPT
Az információs társadalom és a fogyatékosság 
PDF
SnapLogic Elastic Integration Platform as a Service (iPaaS) 
PDF

PDF
デジタルゲームにおける�人工知能のワークフローと導入フロー Similar to 東方ゲームAIとその歴史

PDF
次世代QAとAI 〜ゲーム開発におけるAI活用に正しく向き合うために〜 
PDF

PPTX
強化学習を利用した自律型GameAIの取り組み ~高速自動プレイによるステージ設計支援~ #denatechcon 
PDF
IGDA日本 2019年 新年会 SIG-AI 発表資料 
PPTX

PDF

PDF
![[AI10] ゲームキャラクターのための人工知能と社会への応用 ~ FINAL FANTASY XV を事例として ~](https://cdn.slidesharecdn.com/ss_thumbnails/ai10-170628010423-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[AI10] ゲームキャラクターのための人工知能と社会への応用 ~ FINAL FANTASY XV を事例として ~ 
PPTX

PDF

PDF

PDF

PDF

PPTX
IGDA日本 GDC報告会 ゲームAI分野レポート(2011_4_16) 
PDF
IGDA日本 GDC2011報告会 「ゲームAI分野レポート」 
PDF
シンギュラリティ大学 x SONY x WBA若手の会 講演資料 
PDF
CEDEC2018『逆転オセロニア』におけるAI活用 
PDF

PDF
京都大学ELP「デジタルゲームの人工知能」(前編) 
PDF
東方ゲームAIとその歴史
- 1.
- 2.
自己紹介
• HN: ide_an(いで)
• Twitter: @ide_an
• Mastodon: ide_an@gensokyo.town
• 某社プログラマ
• 東方界隈でツールを作ってます
• 花映塚AI自作ツール 「花AI塚」
• http://usamimi.info/~ide/programe/touhouai/
• サークルチェックツール 「trivial-circlecheck」
• http://trivial-circlecheck.herokuapp.com/
• ダブルスポイラー リプレイずれ修正パッチ 「hanakopatch」
• https://bitbucket.org/ide_an/hanakopatch/src/
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
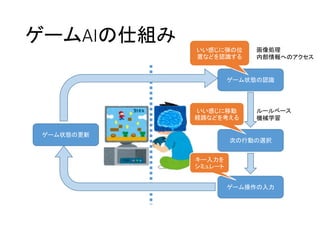
凡例とおことわり
• 凡例
• 画:画像処理
• 内: 内部情報へのアクセス
• ル: ルールベース
• 学: 機械学習
• ツ: AI作成ツール
• おことわり
• AI作成ツールで作成した個々のAIは記載していません
• そもそも追跡できてない
- 18.
原作 STG AI黄昏フロ作品 AI
2002 紅魔郷
2003 妖々夢
2004 萃夢想、永夜抄
2005 花映塚、文花帖 th075Booster (yK8Yp05c) 内学ツ
2006
2007 風神録
2008 緋想天、地霊殿 th105_ai (sweetie) 内ルツ
2009 星蓮船、非想天則 永夜抄AI (sizukuisi) 内ル th123_ai (sweetie) 内ルツ
2010 ダブルスポイラー、
妖精大戦争
永夜抄AI (Gandalph) 画ル
花映塚AI (K.Sakai et al.) 画ル
2011 神霊廟 Touhoubot Project 内ル
ダブルスポイラーAI (trial-run) 画ル
2012 地霊殿AI (ide_an) 内ル
2013 心綺楼、輝針城 TouhouPlayer (feinomenon) 画ル th135_ai (sweetie) 内ルツ
2014 弾幕アマノジャク 紅魔郷AI (aki33524) 内ル
花AI塚 (ide_an) 内ルツ
2015 深秘録、紺珠伝 AI_touhou (nobu-knellfox) 画ル
2016 紺珠伝AI (imenurok) 画学
紅魔郷AI (td2sk) 画学
紺珠伝AI( ntddk) 画学
TouhouCV (Netdex) 画ル
2017 天空璋、憑依華 Twinject (Netdex) 内ル
画: 画像処理、 内: 内部情報へのアクセス、 ル: ルールベース、 学: 機械学習、 ツ: AI作成ツール
- 19.
原作 STG AI黄昏フロ作品 AI
2002 紅魔郷
2003 妖々夢
2004 萃夢想、永夜抄
2005 花映塚、文花帖 th075Booster (yK8Yp05c) 内学ツ
2006
2007 風神録
2008 緋想天、地霊殿 th105_ai (sweetie) 内ルツ
2009 星蓮船、非想天則 永夜抄AI (sizukuisi) 内ル th123_ai (sweetie) 内ルツ
2010 ダブルスポイラー、
妖精大戦争
永夜抄AI (Gandalph) 画ル
花映塚AI (K.Sakai et al.) 画ル
2011 神霊廟 Touhoubot Project 内ル
ダブルスポイラーAI (trial-run) 画ル
2012 地霊殿AI (ide_an) 内ル
2013 心綺楼、輝針城 TouhouPlayer (feinomenon) 画ル th135_ai (sweetie) 内ルツ
2014 弾幕アマノジャク 紅魔郷AI (aki33524) 内ル
花AI塚 (ide_an) 内ルツ
2015 深秘録、紺珠伝 AI_touhou (nobu-knellfox) 画ル
2016 紺珠伝AI (imenurok) 画学
紅魔郷AI (td2sk) 画学
紺珠伝AI( ntddk) 画学
TouhouCV (Netdex) 画ル
2017 天空璋、憑依華 Twinject (Netdex) 内ル
画: 画像処理、 内: 内部情報へのアクセス、 ル: ルールベース、 学: 機械学習、 ツ: AI作成ツール
~2008 STG AI 登場以前
2009~2010 STG AI 登場
2010~2015 知見の公開化
2016~ Deep Learning
- 20.
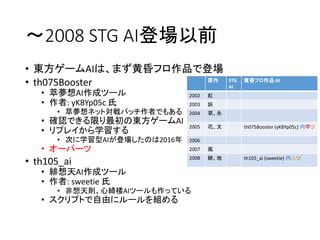
~2008 STG AI登場以前
•東方ゲームAIは、まず黄昏フロ作品で登場
• th075Booster
• 萃夢想AI作成ツール
• 作者: yK8Yp05c 氏
• 萃夢想ネット対戦パッチ作者でもある
• 確認できる限り最初の東方ゲームAI
• リプレイから学習する
• 次に学習型AIが登場したのは2016年
• オーパーツ
• th105_ai
• 緋想天AI作成ツール
• 作者: sweetie 氏
• 非想天則、心綺楼AIツールも作っている
• スクリプトで自由にルールを組める
原作 STG
AI
黄昏フロ作品 AI
2002 紅
2003 妖
2004 萃、永
2005 花、文 th075Booster (yK8Yp05c) 内学ツ
2006
2007 風
2008 緋、地 th105_ai (sweetie) 内ルツ
- 21.
なぜSTG AIが生まれなかったか?
• A.STGは対戦ゲームじゃないから
• 対戦ゲームではAIのニーズが強い
• 「良き対戦相手が欲しい」というニーズがある
• AIと戦う、AI同士で戦わせるなど、AIの楽しみ方が多様
• 一人プレイのSTGではAIのニーズが弱い
• AIのプレイを眺める以外に、AIの楽しみ方がない
• (花映塚は対戦ゲーじゃんと思った人はあとで質問し
てください)
- 22.
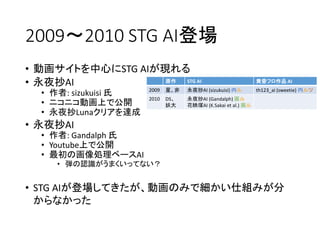
2009~2010 STG AI登場
•動画サイトを中心にSTG AIが現れる
• 永夜抄AI
• 作者: sizukuisi 氏
• ニコニコ動画上で公開
• 永夜抄Lunaクリアを達成
• 永夜抄AI
• 作者: Gandalph 氏
• Youtube上で公開
• 最初の画像処理ベースAI
• 弾の認識がうまくいってない?
• STG AIが登場してきたが、動画のみで細かい仕組みが分
からなかった
原作 STG AI 黄昏フロ作品 AI
2009 星、非 永夜抄AI (sizukuisi) 内ル th123_ai (sweetie) 内ルツ
2010 DS、
妖大
永夜抄AI (Gandalph) 画ル
花映塚AI (K.Sakai et al.) 画ル
- 23.
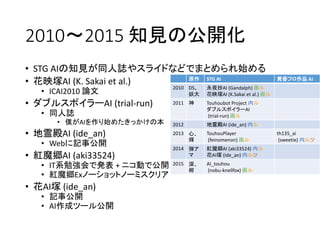
2010~2015 知見の公開化
• STGAIの知見が同人誌やスライドなどでまとめられ始める
• 花映塚AI (K. Sakai et al.)
• ICAI2010 論文
• ダブルスポイラーAI (trial-run)
• 同人誌
• 僕がAIを作り始めたきっかけの本
• 地霊殿AI (ide_an)
• Webに記事公開
• 紅魔郷AI (aki33524)
• IT系勉強会で発表 + ニコ動で公開
• 紅魔郷Exノーショットノーミスクリア
• 花AI塚 (ide_an)
• 記事公開
• AI作成ツール公開
原作 STG AI 黄昏フロ作品 AI
2010 DS、
妖大
永夜抄AI (Gandalph) 画ル
花映塚AI (K.Sakai et al.) 画ル
2011 神 Touhoubot Project 内ル
ダブルスポイラーAI
(trial-run) 画ル
2012 地霊殿AI (ide_an) 内ル
2013 心、
輝
TouhouPlayer
(feinomenon) 画ル
th135_ai
(sweetie) 内ルツ
2014 弾ア
マ
紅魔郷AI (aki33524) 内ル
花AI塚 (ide_an) 内ルツ
2015 深、
紺
AI_touhou
(nobu-knellfox) 画ル
- 24.
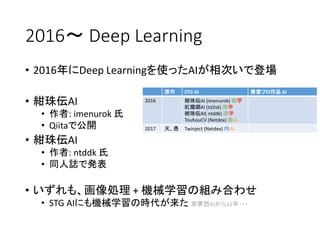
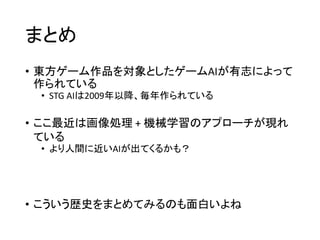
2016~ Deep Learning
•2016年にDeep Learningを使ったAIが相次いで登場
• 紺珠伝AI
• 作者: imenurok 氏
• Qiitaで公開
• 紺珠伝AI
• 作者: ntddk 氏
• 同人誌で発表
• いずれも、画像処理 + 機械学習の組み合わせ
• STG AIにも機械学習の時代が来た 萃夢想AIから11年・・・
原作 STG AI 黄昏フロ作品 AI
2016 紺珠伝AI (imenurok) 画学
紅魔郷AI (td2sk) 画学
紺珠伝AI( ntddk) 画学
TouhouCV (Netdex) 画ル
2017 天、憑 Twinject (Netdex) 内ル
- 25.
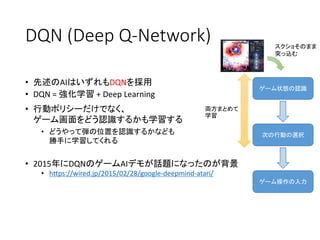
DQN (Deep Q-Network)
•先述のAIはいずれもDQNを採用
• DQN = 強化学習 + Deep Learning
• 行動ポリシーだけでなく、
ゲーム画面をどう認識するかも学習する
• どうやって弾の位置を認識するかなども
勝手に学習してくれる
• 2015年にDQNのゲームAIデモが話題になったのが背景
• https://wired.jp/2015/02/28/google-deepmind-atari/
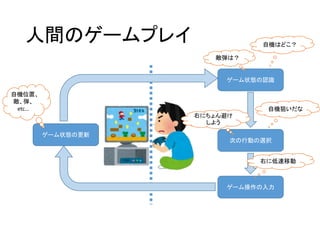
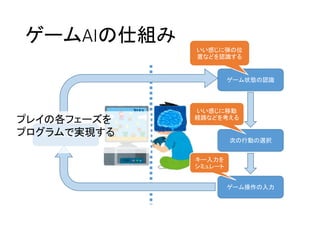
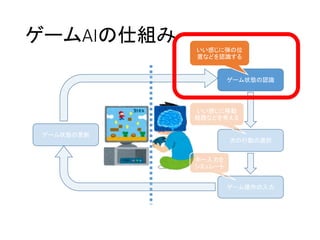
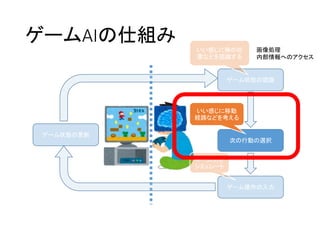
ゲーム状態の認識
次の行動の選択
ゲーム操作の入力
両方まとめて
学習
スクショそのまま
突っ込む
- 26.
- 27.
- 28.
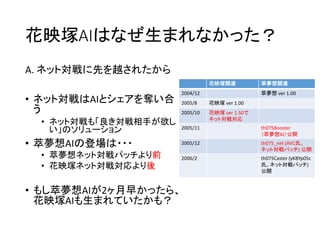
花映塚AIはなぜ生まれなかった?
A. ネット対戦に先を越されたから
• ネット対戦はAIとシェアを奪い合
う
•ネット対戦も「良き対戦相手が欲し
い」のソリューション
• 萃夢想AIの登場は・・・
• 萃夢想ネット対戦パッチより前
• 花映塚ネット対戦対応より後
• もし萃夢想AIが2ヶ月早かったら、
花映塚AIも生まれていたかも?
花映塚関連 萃夢想関連
2004/12 萃夢想 ver 1.00
2005/8 花映塚 ver 1.00
2005/10 花映塚 ver 1.50で
ネット対戦対応
2005/11 th075Booster
(萃夢想AI)公開
2005/12 th075_net (AVC氏、
ネット対戦パッチ) 公開
2006/2 th075Caster (yK8Yp05c
氏、ネット対戦パッチ)
公開
- 29.
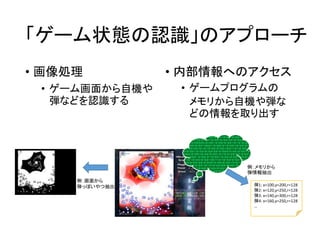
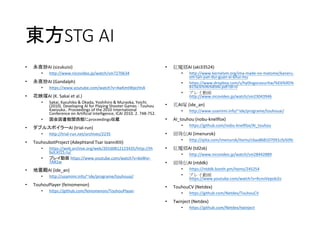
「ゲーム状態の認識」のアプローチ比較
• 画像処理
• メリット
•人間のプレイと同じ条
件
• 作品をまたいで適用で
きる汎用性
• デメリット
• 認識誤差が生じる
• 処理時間がネック
• 認識精度と処理時間
のトレードオフ
• 画像処理の知識が必要
• 内部情報へのアクセス
• メリット
• 情報が正確
• 高速
• デメリット
• 対象ゲームごとに解析
が必要
• 同じゲームでもバー
ジョンアップの度に解
析と修正が必要
• 人間と同じ土俵じゃない
ズルさ
• リバースエンジニアリン
グの知識が必要
- 30.
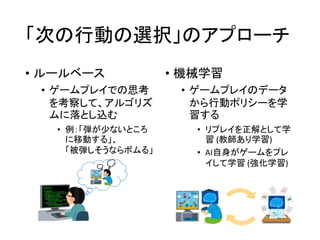
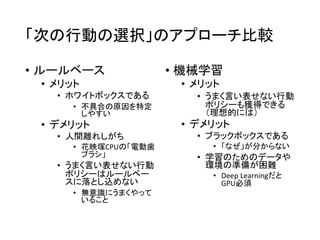
「次の行動の選択」のアプローチ比較
• ルールベース
• メリット
•ホワイトボックスである
• 不具合の原因を特定
しやすい
• デメリット
• 人間離れしがち
• 花映塚CPUの「電動歯
ブラシ」
• うまく言い表せない行動
ポリシーはルールベー
スに落とし込めない
• 無意識にうまくやって
いること
• 機械学習
• メリット
• うまく言い表せない行動
ポリシーも獲得できる
(理想的には)
• デメリット
• ブラックボックスである
• 「なぜ」が分からない
• 学習のためのデータや
環境の準備が困難
• Deep Learningだと
GPU必須
- 31.
東方格闘ゲーAI
• th075Booster (yK8Yp05c)
•http://wiki.mizuumi.net/w/Immaterial_and_Missing_Power/th075booster
• 初出
http://jbbs.shitaraba.net/bbs/read_archive.cgi/computer/6306/1127170527/#7
17
• 開発者回顧録 https://www26.atwiki.jp/th075c/pages/20.html
• Archive
http://web.archive.org/web/20090122055540/http://www.crystal.rm.st/njm45
59/r_board/r_board.cgi
• 現在はrollCaster (mauve)に組み込まれている
• th105_ai(のちにth123_ai) (sweetie)
• http://resemblances.click3.org/product_list/index.cgi/detail/52
• th135_ai (sweetie)
• http://resemblances.click3.org/product_list/index.cgi/detail/54
• 機械学習で緋想天AI構想 (作者不明)
• その後実現したのかは不明。sweetie氏とは別人。
• http://jbbs.shitaraba.net/bbs/read_archive.cgi/game/44334/1211630896/#627
- 32.
東方STG AI
• 永夜抄AI(sizukuisi)
• http://www.nicovideo.jp/watch/sm7270634
• 永夜抄AI (Gandalph)
• https://www.youtube.com/watch?v=4wKmtWpcHnA
• 花映塚AI (K. Sakai et al.)
• Sakai, Kazuhiko & Okada, Yoshihiro & Muraoka, Yoichi.
(2010). Developing AI for Playing Shooter Games - Touhou
Kaeizuka.. Proceedings of the 2010 International
Conference on Artificial Intelligence, ICAI 2010. 2. 748-752.
• 国会図書館関西館にproceedings収蔵
• ダブルスポイラーAI (trial-run)
• http://trial-run.net/archives/2235
• TouhoubotProject (Adephtand Tsar IoannXIII)
• https://web.archive.org/web/20160812123435/http://th
bot.kt15.ru/
• プレイ動画 https://www.youtube.com/watch?v=6xWvr-
TAR1w
• 地霊殿AI (ide_an)
• http://usamimi.info/~ide/programe/touhouai/
• TouhouPlayer (feinomenon)
• https://github.com/feinomenon/TouhouPlayer
• 紅魔郷AI (aki33524)
• http://www.kernelvm.org/ima-made-no-matome/kaneru-
vm-tan-jian-dui-guan-xi-6hui-mu
• https://www.dropbox.com/s/hy0tvgocxourltw/%E6%9D%
B1%E6%96%B9AI.pdf?dl=0
• プレイ動画
http://www.nicovideo.jp/watch/sm23043946
• 花AI塚 (ide_an)
• http://www.usamimi.info/~ide/programe/touhouai/
• AI_touhou (nobu-knellfox)
• https://github.com/nobu-knellfox/AI_touhou
• 紺珠伝AI (imenurok)
• http://qiita.com/imenurok/items/c6aa868107091cfa509c
• 紅魔郷AI (td2sk)
• http://www.nicovideo.jp/watch/sm28442889
• 紺珠伝AI (ntddk)
• https://ntddk.booth.pm/items/245254
• プレイ動画
https://www.youtube.com/watch?v=KcnvVepob2o
• TouhouCV (Netdex)
• https://github.com/Netdex/TouhouCV
• Twinject (Netdex)
• https://github.com/Netdex/twinject
Editor's Notes
- #6 紅魔郷や永夜抄、黄昏フロ作品である萃夢想や緋想天などが対象
収集にとりなど二次創作は対象外
実際の動画が欲しい
- #14 行動選択のアプローチにはルールベースと機械学習の2つがある。
ルールベースは、プログラマがゲームプレイのときに考えていることをコードに落とし込むというもの。
たとえば「弾が少ないところに移動する」「被弾しそうならボムる」など普段のプレイで考えるので、それをコード化する。
機械学習はゲームプレイのデータから行動選択のポリシーをゲームAI自身に自動的に獲得させるというもの。
プログラマ自身が考えるのではなく、ゲームAIに学習してもらうというのが違い。
- #19 2005年に萃夢想AIが登場したのが最初。
STG AIは2009年になってやっと登場。
2009年以降は毎年誰かしらSTG AIを作っている
技術的な傾向で言うと、ゲーム状態の取得方法は画像処理と内部情報アクセスが拮抗している。
行動選択ポリシーの方はルールベースが多いが、最近になって機械学習も出てきた。