Recommended
PPTX
ADVENTURE_Mates Ver.0.5b データ生成
PDF
[データマイニング+WEB勉強会][R勉強会] R言語によるクラスター分析 - 活用編
PPTX
PDF
[DL輪読会]Deep Learning 第6章 深層順伝播型ネットワーク
PDF
PDF
東京都市大学 データ解析入門 4 スパース性と圧縮センシング1
PDF
PDF
PDF
最近のRのランダムフォレストパッケージ -ranger/Rborist-
PPTX
[DL輪読会]SoftTriple Loss: Deep Metric Learning Without Triplet Sampling (ICCV2019)
PPTX
Sliced Wasserstein距離と生成モデル
PDF
SSII2020TS: 機械学習モデルの判断根拠の説明 〜 Explainable AI 研究の近年の展開 〜
PDF
PDF
PDF
多腕バンディット問題: 定式化と応用 (第13回ステアラボ人工知能セミナー)
PDF
PDF
[DL輪読会]Deep Anomaly Detection Using Geometric Transformations
PDF
PDF
PDF
PDF
PPTX
Image Retrieval Overview (from Traditional Local Features to Recent Deep Lear...
PDF
PDF
パターン認識と機械学習 §6.2 カーネル関数の構成
PDF
PDF
PPTX
PDF
PDF
PDF
LexADV_TryDDM Ver. 0.1bの概要
More Related Content
PPTX
ADVENTURE_Mates Ver.0.5b データ生成
PDF
[データマイニング+WEB勉強会][R勉強会] R言語によるクラスター分析 - 活用編
PPTX
PDF
[DL輪読会]Deep Learning 第6章 深層順伝播型ネットワーク
PDF
PDF
東京都市大学 データ解析入門 4 スパース性と圧縮センシング1
PDF
PDF
What's hot
PDF
最近のRのランダムフォレストパッケージ -ranger/Rborist-
PPTX
[DL輪読会]SoftTriple Loss: Deep Metric Learning Without Triplet Sampling (ICCV2019)
PPTX
Sliced Wasserstein距離と生成モデル
PDF
SSII2020TS: 機械学習モデルの判断根拠の説明 〜 Explainable AI 研究の近年の展開 〜
PDF
PDF
PDF
多腕バンディット問題: 定式化と応用 (第13回ステアラボ人工知能セミナー)
PDF
PDF
[DL輪読会]Deep Anomaly Detection Using Geometric Transformations
PDF
PDF
PDF
PDF
PPTX
Image Retrieval Overview (from Traditional Local Features to Recent Deep Lear...
PDF
PDF
パターン認識と機械学習 §6.2 カーネル関数の構成
PDF
PDF
PPTX
PDF
More from ADVENTURE Project
PDF
PDF
LexADV_TryDDM Ver. 0.1bの概要
PDF
ADVENTUREの他のモジュール・関連プロジェクトの紹介
PDF
ADVENTURE_MATES専用ビューア AdvMatesViewerについて
PDF
ADVENTURE_Magnetic Ver.1.5.0の概要
PDF
PDF
ADVENTURE_Solid Ver.2.0の概要
PPT
ADVENTURE_BCtool Ver.2.の概要と実際[デモ]
PDF
ADVENTUREの他のモジュール・関連プロジェクトの紹介
PDF
大規模並列解析用可視化モジュール ADVENTURE_POSTtool
PPT
Linuxにおけるコマンドとエディタの使用方法の紹介
PDF
ADVENTUREの他のモジュール・関連プロジェクトの紹介
PPT
PDF
ADVENTURE_Solid-1.2 構造体リファレンスマニュアル
PDF
ADVENTURE_Solid 線形代数関数群 advlasリファレンスマニュアル
PPT
ADVENTURE_Solid Ver.1.2の概要
PPT
PDF
PDF
ADVENTUREの他のモジュール・関連プロジェクトの紹介
PDF
ADVENTURE_Magnetic Ver.1.3の解説
ADVENTURE_Mates Ver. 0.5bの概要 1. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
藤井秀樹
東京大学大学院工学系研究科システム創成学専攻
http://save.sys.t.u-tokyo.ac.jp
fujii@sys.t.u-tokyo.ac.jp
第10回 ADVENTURE定期セミナー
2015.06.26
ADVENTURE_Mates Ver. 0.5bの概要
2. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
目次
交通流シミュレーションの意義
交通工学の課題
交通流シミュレーションのニーズ
交通流シミュレータADVENTURE_Matesの開発
シミュレータの開発方針と特徴
マルチエージェントモデルによる交通流現象のモデル化
– 道路空間の定義
– 自動車エージェントの定義
シミュレータとしての機能
基本性能の検証と妥当性の確認
ADVENTURE_Matesを応用した研究事例
おわりに
2
3. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
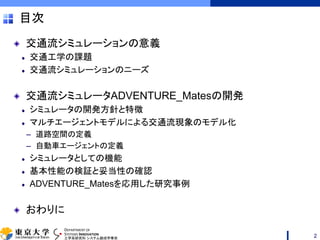
背景 – 交通工学の課題 (1)
3
交通事故
交通渋滞
国内で発生する渋滞損失
= 年間38億時間・12兆円
環境問題
日本のCO2総排出量のうち,
約18%は自動車交通に由来
自動車
エネルギー
転換家庭・業務
産業
運輸
自動車運転能力の有無により
享受できる社会的利益に差
移動権の格差
0
3000
6000
9000
12000
15000
18000
0
20
40
60
80
100
120
S21
26
31
36
41
46
51
56
61
H3
8
13
18
重傷者数・死者数
発生件数・軽傷者数
年度
発生件数[万件] 軽傷者数[万人]
重傷者数[十人] 死者数[人]
理想の交通
迅速性
安全性
快適性
経済性
正確性
随意性
公平性
4. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
背景 – 交通工学の課題 (2)
災害と交通
道路ネットワーク機能の喪失
– 災害による直接的な破壊
– 周囲の建築物の倒壊による閉塞
– 信号機の停電
避難のための交通
– 原則徒歩,移動困難者や避難所が遠い場合は自動車
避難する自動車の渋滞,乗り捨て
道路ネットワーク寸断による迂回の必要性
救助・支援物資輸送・復旧のための交通
道路の復旧
高速道路 15箇所
国道 171箇所
県道等 540箇所
東日本大震災により
通行止めとなった道路
同時に検討する必要
4
5. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
背景 – 交通工学の課題 (3)
解決策の例
道路構造の改良
– バイパスの建設,ネットワークの多重化
– 交差点形状の変更(例 右折専用レーン設置)
道路施設運用の効率化
– 信号サイクルの最適化
車両の改良
– ハイブリッドカー・電気自動車
– ITS(Intelligent Transport Systems)の利用
交通システムの転換
– 脱自動車社会の実現
カーシェアリング,公共交通の利用
交通渋滞
交通事故
地球温暖化
移動に関する
格差
災害対策
5
対策は有効か,別のリスクが露見する恐れはないか,
定量的に予測したい
6. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
交通流シミュレーションのニーズ
交通現象を解明するための科学的手法
交通は複雑・巨大であり,実験は難しい
– 時間・コストの問題 / 安全確保の問題 / インフラとしての必要性
理論式による試算では細かな挙動や動的な変化を捉られない
6
シミュレーションによるバーチャル社会実験
• 既存のインフラに捉われない,自由な条件設定が可能.
• 現実の社会活動を妨げない.
• 安価であり,高速化可能.再実験が容易.
• 参加者を危険にさらす心配がない.
知的マルチエージェントモデルを用いた大規模・微視的交通流シミュレータ
ADVENTURE_Mates (AdvMates, MATES)
Multi-Agent-based Traffic and Environment Simulator
7. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
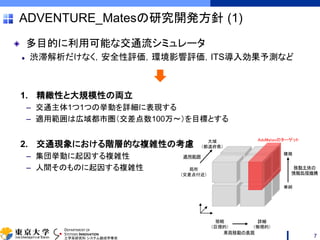
ADVENTURE_Matesの研究開発方針 (1)
多目的に利用可能な交通流シミュレータ
渋滞解析だけなく,安全性評価,環境影響評価,ITS導入効果予測など
1. 精緻性と大規模性の両立
– 交通主体1つ1つの挙動を詳細に表現する
– 適用範囲は広域都市圏(交差点数100万~)を目標とする
2. 交通現象における階層的な複雑性の考慮
– 集団挙動に起因する複雑性
– 人間そのものに起因する複雑性
7
適用範囲
簡略
(巨視的)
詳細
(微視的)
大域
(都道府県)
局所
(交差点付近)
単純
複雑
移動主体の
情報処理機構
AdvMatesのターゲット
車両移動の表現
8. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
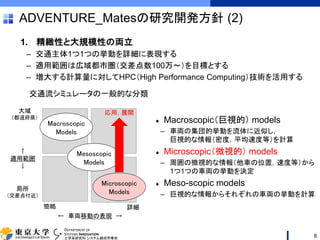
ADVENTURE_Matesの研究開発方針 (2)
1. 精緻性と大規模性の両立
– 交通主体1つ1つの挙動を詳細に表現する
– 適用範囲は広域都市圏(交差点数100万~)を目標とする
– 増大する計算量に対してHPC(High Performance Computing)技術を活用する
8
Macroscopic(巨視的) models
– 車両の集団的挙動を流体に近似し,
巨視的な情報(密度,平均速度等)を計算
Microscopic(微視的) models
– 周囲の微視的な情報(他車の位置,速度等)から
1つ1つの車両の挙動を決定
Meso-scopic models
– 巨視的な情報からそれぞれの車両の挙動を計算
↑
適用範囲
↓
簡略 詳細
大域
(都道府県)
局所
(交差点付近)
Macroscopic
Models
← 車両移動の表現 →
Microscopic
Models
Mesoscopic
Models
交通流シミュレータの一般的な分類
応用,展開
9. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
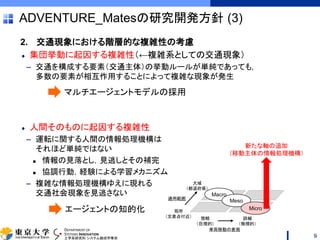
ADVENTURE_Matesの研究開発方針 (3)
2. 交通現象における階層的な複雑性の考慮
集団挙動に起因する複雑性(←複雑系としての交通現象)
– 交通を構成する要素(交通主体)の挙動ルールが単純であっても,
多数の要素が相互作用することによって複雑な現象が発生
人間そのものに起因する複雑性
– 運転に関する人間の情報処理機構は
それほど単純ではない
情報の見落とし,見逃しとその補完
協調行動,経験による学習メカニズム
– 複雑な情報処理機構ゆえに現れる
交通社会現象を見逃さない
9
マルチエージェントモデルの採用
エージェントの知的化
適用範囲
簡略
(巨視的)
詳細
(微視的)
大域
(都道府県)
局所
(交差点付近)
車両移動の表現
Macro
Meso
Micro
新たな軸の追加
(移動主体の情報処理機構)
10. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
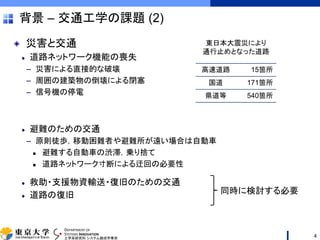
開発の経緯
– バーチャル社会実験の提案
[Yoshimura, “MATES: Multi-Agent Based Traffic and Environment Simulator —
Theory, Implementation and Practical Application”, Computer Modeling in
Engineering and Sciences, Vol. 11, No. 1, pp. 17-25, 2006.]
– 歩行者との相互作用
[藤井ら, 知的マルチエージェント交通流シミュレータMATESの開発 第二報:
歩行者エージェントの実装と歩車相互作用の理論・実測値との比較, シミュレー
ション, Vol. 25, No. 4, pp. 274-280, 2006]
– 領域分割法による並列計算
[小橋ら,知的マルチエージェント交通流シミュレータMATESの並列化, 日本計算
工学会論文集, Vol. 2010, 20100003, 2010 ]
– 視覚認知モデルと交通事故シミュレーション
[藤井ら, マルチエージェント交通流シミュレーションにおける交通事故モデリング,
人工知能学会論文誌, Vol. 26, No. 1, pp. 42-49, 2011 ]
– 自動車のCO2排出量の推定
[Fujii, et al., “Precise Evaluation of Vehicles Emission in Urban Traffic Using Multi-
agent-based Traffic Simulator MATES”, CMES: Computer Modeling in
Engineering and Sciences, Vol. 88, No. 1, pp. 49-64, 2012. ]
10
MATES -Ⅰ
- 1999年~
- MASの採用
- A*による経路探索
MATES -Ⅱ
- 2007年~
- 地図の自由度の向上
- プレ処理の整備
- 追従モデルの改良
ADVENTURE_Mates
- 基本機能を抜粋
- 2014年ソース公開
(Ver. 0.5b)
誰もが利用可能な交通流シミュレータへ
http://adventure.sys.t.u-tokyo.ac.jp/jp/download/Mates.html
(研究成果の例)
11. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
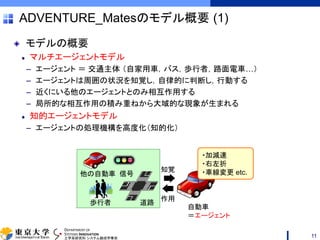
ADVENTURE_Matesのモデル概要 (1)
モデルの概要
マルチエージェントモデル
– エージェント = 交通主体 (自家用車,バス,歩行者,路面電車…)
– エージェントは周囲の状況を知覚し,自律的に判断し,行動する
– 近くにいる他のエージェントとのみ相互作用する
– 局所的な相互作用の積み重ねから大域的な現象が生まれる
知的エージェントモデル
– エージェントの処理機構を高度化(知的化)
11
他の自動車
歩行者
信号
道路
知覚
作用
・加減速
・右左折
・車線変更 etc.
自動車
=エージェント
12. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
ADVENTURE_Matesのモデル概要 (2)
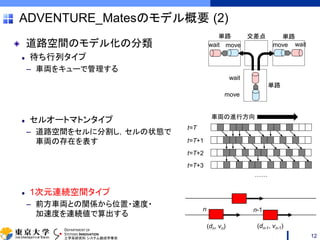
道路空間のモデル化の分類
待ち行列タイプ
– 車両をキューで管理する
セルオートマトンタイプ
– 道路空間をセルに分割し,セルの状態で
車両の存在を表す
1次元連続空間タイプ
– 前方車両との関係から位置・速度・
加速度を連続値で算出する
12
move
wait
move waitwait move
交差点単路 単路
単路
車両の進行方向
t=T
t=T+1
t=T+2
t=T+3
……
n n-1
(dn, vn) (dn-1, vn-1)
13. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
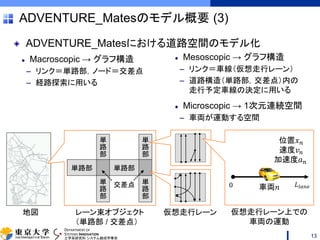
Mesoscopic → グラフ構造
– リンク=車線(仮想走行レーン)
– 道路構造(単路部,交差点)内の
走行予定車線の決定に用いる
Microscopic → 1次元連続空間
– 車両が運動する空間
Macroscopic → グラフ構造
– リンク=単路部,ノード=交差点
– 経路探索に用いる
単
路
部
ADVENTURE_Matesのモデル概要 (3)
13
単路部
単
路
部
単
路
部
交差点
単路部
単
路
部
地図 レーン束オブジェクト
(単路部 / 交差点)
仮想走行レーン
𝐿𝑙𝑎𝑛𝑒0
位置𝑥 𝑛
速度𝑣 𝑛
加速度𝑎 𝑛
車両𝑛
仮想走行レーン上での
車両の運動
ADVENTURE_Matesにおける道路空間のモデル化
14. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
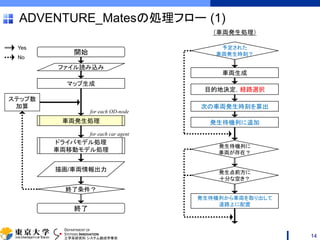
ADVENTURE_Matesの処理フロー (1)
14
開始
ファイル読み込み
マップ生成
終了条件?
終了
ステップ数
加算
Yes
No
描画/車両情報出力
ドライバモデル処理
車両移動モデル処理
車両発生処理
for each OD-node
(車両発生処理)
予定された
車両発生時刻?
目的地決定,経路選択
車両生成
発生待機列に追加
発生待機列に
車両が存在?
次の車両発生時刻を算出
発生点前方に
十分な空き?
発生待機列から車両を取り出して
道路上に配置
for each car agent
15. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
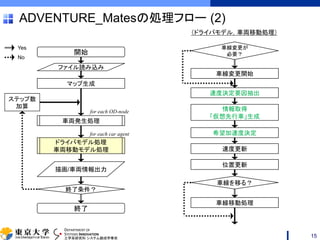
ADVENTURE_Matesの処理フロー (2)
15
開始
ファイル読み込み
マップ生成
終了条件?
終了
ステップ数
加算
Yes
No
描画/車両情報出力
ドライバモデル処理
車両移動モデル処理
車両発生処理
for each OD-node
for each car agent
(ドライバモデル,車両移動処理)
情報取得
「仮想先行車」生成
速度決定要因抽出
速度更新
車線を移る?
希望加速度決定
車線変更が
必要?
車線変更開始
車線移動処理
位置更新
16. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
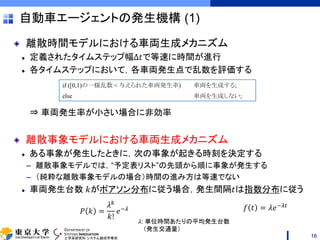
自動車エージェントの発生機構 (1)
離散時間モデルにおける車両生成メカニズム
定義されたタイムステップ幅Δ𝑡で等速に時間が進行
各タイムステップにおいて,各車両発生点で乱数を評価する
⇒ 車両発生率が小さい場合に非効率
離散事象モデルにおける車両生成メカニズム
ある事象が発生したときに,次の事象が起きる時刻を決定する
– 離散事象モデルでは,“予定表リスト”の先頭から順に事象が発生する
– (純粋な離散事象モデルの場合)時間の進み方は等速でない
車両発生台数 𝑘がポアソン分布に従う場合,発生間隔𝑡は指数分布に従う
16
if ([0,1)の一様乱数 < 与えられた車両発生率) 車両を生成する;
else 車両を生成しない;
𝑃 𝑘 =
𝜆 𝑘
𝑘!
𝑒−𝜆 𝑓 𝑡 = 𝜆𝑒−𝜆𝑡
𝜆: 単位時間あたりの平均発生台数
(発生交通量)
17. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
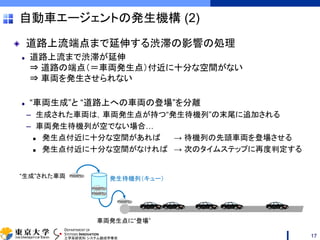
道路上流端点まで延伸する渋滞の影響の処理
道路上流まで渋滞が延伸
⇒ 道路の端点(=車両発生点)付近に十分な空間がない
⇒ 車両を発生させられない
“車両生成”と “道路上への車両の登場”を分離
– 生成された車両は,車両発生点が持つ“発生待機列”の末尾に追加される
– 車両発生待機列が空でない場合…
発生点付近に十分な空間があれば → 待機列の先頭車両を登場させる
発生点付近に十分な空間がなければ → 次のタイムステップに再度判定する
自動車エージェントの発生機構 (2)
17
車両発生点に“登場”
“生成”された車両 発生待機列(キュー)
18. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
自動車エージェントの機能 (1)
エージェントの経路選択機構
経路はO(Origin: 出発地)とD(Destination: 目的地)とを結ぶ交差点の
リストとして個々のエージェントが保持
経路選択にはA*アルゴリズムを用いる
[Hart, et al., A Formal Basis for the Heuristic Determination of Minimum Cost Paths,
IEEE, Transactions on Systems Science and Cybernetics,, Vol. 4, No. 2, pp. 100-107, 1968]
以下の6つの要因を考慮して各エージェントの好みの経路を選択する
1. 経路の長さ
2. 予想旅行時間
3. 交差点での直進回数
4. 交差点での左折回数
5. 交差点での右折回数
6. 通過する単路部の幅の逆数 … 値が小さい方が高効用
走行中の状況により予定された経路から外れた場合には再探索する
18
19. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
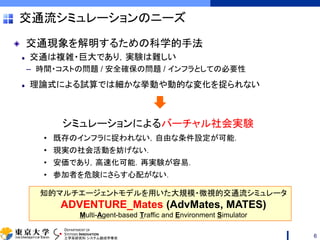
自動車エージェントの加速度決定要因
自動車エージェントの機能 (2)
エージェントの加速度決定機構
追従モデルの1つであるGeneralized Force Modelを採用・拡張
[Helbing, et al., Generalized Force Model of Traffic Dynamics, Physical Review E, Vol. 58, pp. 133–13, 1998]
19
最高速度まで加速 先行車に追従
車線変更先の
先行車に追従
車線変更中の
車両に追従
交差点手前で停止
(信号)
交差点手前で停止
(交錯レーンの車両)
右左折前減速
各要因に対する加速度候補を算出
最小の加速度候補を採用
速度を更新
位置を更新
ሷ𝑥 𝑛 𝑡 + 𝑇 =
𝑉 𝑠 𝑛, ሶ𝑥 𝑛 𝑡 − ሶ𝑥 𝑛 𝑡
𝜏1
−
Δ𝑣 𝑛Θ Δ𝑣 𝑛
𝜏2
exp −
𝑠 𝑛 − 𝑠 ሶ𝑥 𝑛 𝑡
𝑅′
𝑉 𝑠 𝑛, ሶ𝑥 𝑛 𝑡 = 𝑣n
0
1 − exp −
𝑠 𝑛 − 𝑠 ሶ𝑥 𝑛 𝑡
𝑅
Δ𝑣 𝑛 = ሶ𝑥 𝑛 𝑡 − ሶ𝑥 𝑛−1 𝑡 , 𝑠 𝑛 = 𝑥 𝑛−1 𝑡 − 𝑥 𝑛(𝑡), 𝑠 ሶ𝑥 𝑛 𝑡 = 𝑑 + 𝑇 ሶ𝑥 𝑛(𝑡)
𝑥 𝑛 𝑡 : 時刻𝑡における車両𝑛の位置
𝑇: 反応遅れ時間
𝑣 𝑛
0
: 車両𝑛の希望速度
𝜏1, 𝜏2: 緩和時間
𝑅, 𝑅′
: 相互作用距離
𝑑: 停車時の車間距離
Θ: Heaviside関数
20. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
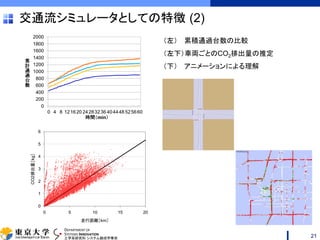
交通流シミュレータとしての特徴 (1)
開発言語と動作環境
C++ (一部はC言語)で開発,OpenMPによるマルチスレッド処理
Linux上で開発,Windows (Cygwin, MinGW) に対応
シミュレータの入出力
20
ADVENTURE_Mates
(advmates-calc/sim)
道路ネットワークに関する情報
• ノード(交差点)の座標
• ノード(交差点)の接続関係
• 車線数
信号に関する情報
• サイクル長
• スプリット
• オフセット
車両に関する情報
• OD表(各O-Dペアの交通量)
• 経路探索パラメータ
各タイムステップ(Δ𝑡 = 0.1[sec])の
車両の位置,速度,加速度
各車両の移動距離/時間
各観測点での交通量
ユーザによる手入力
OpenStreetMap からインポート
http://www.openstreetmap.org/
※advmates-calc
: 計算のみ実行して結果をテキストファイルに出力
advmates-sim
: 計算と同時に簡易的な可視化を実行
21. 22. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
基本性能の検証と妥当性の確認 (1)
交通流シミュレータとしての検証
標準検証(verification)マニュアル [交通工学研究会, 2002]
– シミュレータ使用者にシミュレータの特性を公開するのが目的
– 検証項目
車両の発生
モデルパラメータと交通流率の関係/ボトルネック容量
モデルパラメータと飽和交通流率の関係
渋滞の延伸と解消およびショックウェーブの伝播速度
合流部の容量と合流比(未実施)
信号交差点での対向直進交通による右折容量の低下
経路選択(未実施)
22
23. 24. 25. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
基本性能の検証と妥当性の確認 (4)
自由流のQ(交通流)-K(密度)特性
(パラメータと交通流率の関係)
発生点 到着点
1km…車両密度を測定
需要:500,1000,1500,2000,2500,3000[台/h]
反応遅れ時間 1.0[s]
最大加速度 2.5[m/s2](小型),
1.4[m/s2](大型)
希望速度 60[km/h]
大型車混入率 15%
検証に用いたパラメータ
シミュレーション条件
0
500
1000
1500
2000
2500
3000
3500
0 10 20 30 40 50 60 70
交通量Q[pcu/hr]
密度K[pcu/km]
500台/hr
1000台/hr
1500台/hr
2000台/hr
2500台/hr
3000台/hr
実際に観測された交通流のQ-K関係
[Sugiyama et al., 2008] より引用
交通量を測定
シミュレーション結果
25
26. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
基本性能の検証と妥当性の確認 (5)
渋滞流のQ(交通流)-K(密度)特性
(パラメータと交通流率の関係)
検証に用いたパラメータ
反応遅れ時間 1.0[s]
最大加速度 2.5[m/s2](小型),
1.4[m/s2](大型)
希望速度 60[km/h]
大型車混入率 15%
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150
交通量Q[pcu/hr]
密度K[pcu/km]
20km/hr
30km/hr
40km/hr
50km/hr
自由流
到着点発生点
1km…車両密度を測定
交通量を測定
シミュレーション条件
需要:3500[台/h]
相転移
実際に観測された交通流のQ-K関係
[Sugiyama et al., 2008] より引用
シミュレーション結果
ボトルネック:
制限速度50,40,30,20[km/h]
交通流のQ-K特性を表現できている
26
27. 28. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
200m
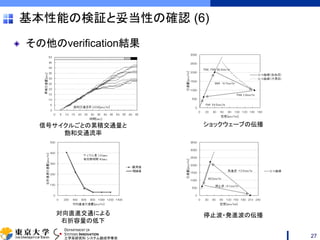
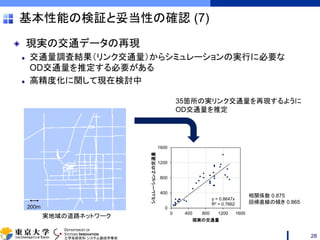
基本性能の検証と妥当性の確認 (7)
現実の交通データの再現
交通量調査結果(リンク交通量)からシミュレーションの実行に必要な
OD交通量を推定する必要がある
高精度化に関して現在検討中
28
実地域の道路ネットワーク
相関係数 0.875
回帰直線の傾き 0.865
y = 0.8647x
R² = 0.7662
0
400
800
1200
1600
0 400 800 1200 1600
シミュレーション上の交通量
現実の交通量
35箇所の実リンク交通量を再現するように
OD交通量を推定
29. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
研究事例
29
交通流シミュレータとしての機能向上
交通と環境
• CO2排出量の推定
交通とテクノロジ
• 電気自動車
• ITS技術評価
道路空間の再配分
• 路面電車
• オンデマンドバス
• 歩車混合交通
エージェントの処理機構
• 協調行動
• 視覚認知モデルと交通事故
• 経路選択の学習
計算技術
• 領域分割法を用いた並列計算
• 経路探索の高速化
渋滞の解消
• バイパスの建設
• 信号制御の最適化
シミュレーション基盤
シミュレーション応用
30. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
視覚認知モデルと交通事故
ドライバーの視野と視点移動を考慮したモデル
運転席から見える風景を画像化し,視界の中からのみ対象物を
「認知する」モデル → 交通事故の表現
周辺視野
中心視野
[藤井, 吉村, 高野, マルチエージェント交通流シミュレーションにおける交通事故モデリング, 人工知能学会論文誌,
Vol. 26, No. 1, pp. 42-49, 2011.]
30
31. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
経路選択の学習
学習機構を搭載した自動車エージェント
従来の(Dijkstra法,A*等の)経路選択アルゴリズムの問題点
– 運転者がネットワーク全体のコストを常時正確に取得可能
– 道路ネットワークの変更に瞬時に反応し,過渡状態が表現できない
– 本来の運転者は道路ネットワークの変更に応じて知識を徐々に修正するはず
Q学習を利用した経路選択アルゴリズム
31
道路ネットワークの知識を
試行錯誤的に獲得
過去の経路選択経験に邪魔され
過渡的な渋滞が発生
↓
道路ネットワークに関する知識を修正
[内田, 藤井, 吉村, 荒井, 道路ネットワークの変化に対する経路選択の学習, 情報処理学会論文誌, Vol. 53, No. 11,
pp. 2409-2418, 2012. ]
32. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
歩車混合交通シミュレーション
自動車系と歩行者系の連成シミュレーション
系の分離および双方の系の相互作用モデルを構築
自動車系
歩行者系
加速度 At
速度 Vt
位置 Xt
加速度at
速度 vt
位置 xt
加速度 At+Dt
速度 Vt+Dt
位置 Xt+Dt
加速度 at+Dt
速度 vt+Dt
位置 xt+Dt
時刻
渋谷駅前スクランブル交差点のシミュレーション
…
…
…
…
[藤井, 吉村, 知的マルチエージェント交通流シミュレータMATESの開発 第三報:多階層歩行者モデルの開発と
歩車混合交通シミュレーション, 日本シミュレーション学会論文誌, Vol. 3, No. 3, pp. 70-78, 2011.]
32
33. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
二酸化炭素排出量の推定
排気排出量推定システムの構築
千葉県柏市を走行する車両の
CO2排出量の分布
– 走行距離が同じであっても,排出
量には大きな差があることを確認
ADVENTURE_MatesによるSIM結果
(各車の速度・加速度)
自動車排気排出量データベース(※)
道路地図
(勾配)
車両の特性や微視的な挙動を反映した
二酸化炭素排出量の推定が可能
※石油エネルギー技術センターによる
[Fujii, Yoshimura, Precise Evaluation of Vehicles Emission in Urban
Traffic Using Multi-agent-based Traffic Simulator MATES, CMES:
Computer Modeling in Engineering and Sciences, Vol. 88, No. 1, pp.
49-64, 2012. ]
33
34. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
おわりに
交通流シミュレータADVENTURE_Matesの研究開発
シミュレータの開発方針
– 精緻性と大規模性の両立
– 交通現象における階層的な複雑性の考慮
知的マルチエージェントモデルを用いた交通流のモデル化
– 階層的な道路空間の定義
– 自動車エージェントの発生/経路選択/加速度決定
交通問題の変化とADVENTURE_Matesを用いた研究
交通を取り巻く状況は刻々と変化している
⇒ 新たな課題(環境問題・ITSの検証・公共交通指向開発)
シミュレータに対するニーズの多様化と,それを受け入れられる枠組み
34
35. DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
今後の開発予定
既に実装済みの機能 (動作確認中)
道路ネットワークの機能
– 時間帯別・車種別の単路部通行規制
– 時間帯別の速度規制
自動車エージェントの機能
– 発生時刻が指定された車両(バスなど)
– 特定の出発地・目的地を除外した経路選択
その他
– オフラインレンダリング(サーバ上で可視化:計算しながら画像ファイルを出力)
35

![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
背景 – 交通工学の課題 (1)
3
交通事故
交通渋滞
国内で発生する渋滞損失
= 年間38億時間・12兆円
環境問題
日本のCO2総排出量のうち,
約18%は自動車交通に由来
自動車
エネルギー
転換家庭・業務
産業
運輸
自動車運転能力の有無により
享受できる社会的利益に差
移動権の格差
0
3000
6000
9000
12000
15000
18000
0
20
40
60
80
100
120
S21
26
31
36
41
46
51
56
61
H3
8
13
18
重傷者数・死者数
発生件数・軽傷者数
年度
発生件数[万件] 軽傷者数[万人]
重傷者数[十人] 死者数[人]
理想の交通
迅速性
安全性
快適性
経済性
正確性
随意性
公平性](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-3-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
開発の経緯
– バーチャル社会実験の提案
[Yoshimura, “MATES: Multi-Agent Based Traffic and Environment Simulator —
Theory, Implementation and Practical Application”, Computer Modeling in
Engineering and Sciences, Vol. 11, No. 1, pp. 17-25, 2006.]
– 歩行者との相互作用
[藤井ら, 知的マルチエージェント交通流シミュレータMATESの開発 第二報:
歩行者エージェントの実装と歩車相互作用の理論・実測値との比較, シミュレー
ション, Vol. 25, No. 4, pp. 274-280, 2006]
– 領域分割法による並列計算
[小橋ら,知的マルチエージェント交通流シミュレータMATESの並列化, 日本計算
工学会論文集, Vol. 2010, 20100003, 2010 ]
– 視覚認知モデルと交通事故シミュレーション
[藤井ら, マルチエージェント交通流シミュレーションにおける交通事故モデリング,
人工知能学会論文誌, Vol. 26, No. 1, pp. 42-49, 2011 ]
– 自動車のCO2排出量の推定
[Fujii, et al., “Precise Evaluation of Vehicles Emission in Urban Traffic Using Multi-
agent-based Traffic Simulator MATES”, CMES: Computer Modeling in
Engineering and Sciences, Vol. 88, No. 1, pp. 49-64, 2012. ]
10
MATES -Ⅰ
- 1999年~
- MASの採用
- A*による経路探索
MATES -Ⅱ
- 2007年~
- 地図の自由度の向上
- プレ処理の整備
- 追従モデルの改良
ADVENTURE_Mates
- 基本機能を抜粋
- 2014年ソース公開
(Ver. 0.5b)
誰もが利用可能な交通流シミュレータへ
http://adventure.sys.t.u-tokyo.ac.jp/jp/download/Mates.html
(研究成果の例)](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-10-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
自動車エージェントの機能 (1)
エージェントの経路選択機構
経路はO(Origin: 出発地)とD(Destination: 目的地)とを結ぶ交差点の
リストとして個々のエージェントが保持
経路選択にはA*アルゴリズムを用いる
[Hart, et al., A Formal Basis for the Heuristic Determination of Minimum Cost Paths,
IEEE, Transactions on Systems Science and Cybernetics,, Vol. 4, No. 2, pp. 100-107, 1968]
以下の6つの要因を考慮して各エージェントの好みの経路を選択する
1. 経路の長さ
2. 予想旅行時間
3. 交差点での直進回数
4. 交差点での左折回数
5. 交差点での右折回数
6. 通過する単路部の幅の逆数 … 値が小さい方が高効用
走行中の状況により予定された経路から外れた場合には再探索する
18](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-18-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
自動車エージェントの加速度決定要因
自動車エージェントの機能 (2)
エージェントの加速度決定機構
追従モデルの1つであるGeneralized Force Modelを採用・拡張
[Helbing, et al., Generalized Force Model of Traffic Dynamics, Physical Review E, Vol. 58, pp. 133–13, 1998]
19
最高速度まで加速 先行車に追従
車線変更先の
先行車に追従
車線変更中の
車両に追従
交差点手前で停止
(信号)
交差点手前で停止
(交錯レーンの車両)
右左折前減速
各要因に対する加速度候補を算出
最小の加速度候補を採用
速度を更新
位置を更新
ሷ𝑥 𝑛 𝑡 + 𝑇 =
𝑉 𝑠 𝑛, ሶ𝑥 𝑛 𝑡 − ሶ𝑥 𝑛 𝑡
𝜏1
−
Δ𝑣 𝑛Θ Δ𝑣 𝑛
𝜏2
exp −
𝑠 𝑛 − 𝑠 ሶ𝑥 𝑛 𝑡
𝑅′
𝑉 𝑠 𝑛, ሶ𝑥 𝑛 𝑡 = 𝑣n
0
1 − exp −
𝑠 𝑛 − 𝑠 ሶ𝑥 𝑛 𝑡
𝑅
Δ𝑣 𝑛 = ሶ𝑥 𝑛 𝑡 − ሶ𝑥 𝑛−1 𝑡 , 𝑠 𝑛 = 𝑥 𝑛−1 𝑡 − 𝑥 𝑛(𝑡), 𝑠 ሶ𝑥 𝑛 𝑡 = 𝑑 + 𝑇 ሶ𝑥 𝑛(𝑡)
𝑥 𝑛 𝑡 : 時刻𝑡における車両𝑛の位置
𝑇: 反応遅れ時間
𝑣 𝑛
0
: 車両𝑛の希望速度
𝜏1, 𝜏2: 緩和時間
𝑅, 𝑅′
: 相互作用距離
𝑑: 停車時の車間距離
Θ: Heaviside関数](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-19-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
交通流シミュレータとしての特徴 (1)
開発言語と動作環境
C++ (一部はC言語)で開発,OpenMPによるマルチスレッド処理
Linux上で開発,Windows (Cygwin, MinGW) に対応
シミュレータの入出力
20
ADVENTURE_Mates
(advmates-calc/sim)
道路ネットワークに関する情報
• ノード(交差点)の座標
• ノード(交差点)の接続関係
• 車線数
信号に関する情報
• サイクル長
• スプリット
• オフセット
車両に関する情報
• OD表(各O-Dペアの交通量)
• 経路探索パラメータ
各タイムステップ(Δ𝑡 = 0.1[sec])の
車両の位置,速度,加速度
各車両の移動距離/時間
各観測点での交通量
ユーザによる手入力
OpenStreetMap からインポート
http://www.openstreetmap.org/
※advmates-calc
: 計算のみ実行して結果をテキストファイルに出力
advmates-sim
: 計算と同時に簡易的な可視化を実行](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-20-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
基本性能の検証と妥当性の確認 (1)
交通流シミュレータとしての検証
標準検証(verification)マニュアル [交通工学研究会, 2002]
– シミュレータ使用者にシミュレータの特性を公開するのが目的
– 検証項目
車両の発生
モデルパラメータと交通流率の関係/ボトルネック容量
モデルパラメータと飽和交通流率の関係
渋滞の延伸と解消およびショックウェーブの伝播速度
合流部の容量と合流比(未実施)
信号交差点での対向直進交通による右折容量の低下
経路選択(未実施)
22](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-22-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
基本性能の検証と妥当性の確認 (2)
車両発生プロセスの特性
交通需要 500[台/h] の場合
23
発生点 到着点
需要:500,1000,2000 [台/h]
シミュレーション条件
発生交通量と車頭時間間隔を計測](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-23-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
基本性能の検証と妥当性の確認 (3)
車両発生プロセスの特性
交通需要 1000[台/h] の場合
交通需要 2000[台/h]の場合
24
実際の発生交通量にばらつきがあることに注意
車頭時間間隔は理論値によく合致](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-24-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
基本性能の検証と妥当性の確認 (4)
自由流のQ(交通流)-K(密度)特性
(パラメータと交通流率の関係)
発生点 到着点
1km…車両密度を測定
需要:500,1000,1500,2000,2500,3000[台/h]
反応遅れ時間 1.0[s]
最大加速度 2.5[m/s2](小型),
1.4[m/s2](大型)
希望速度 60[km/h]
大型車混入率 15%
検証に用いたパラメータ
シミュレーション条件
0
500
1000
1500
2000
2500
3000
3500
0 10 20 30 40 50 60 70
交通量Q[pcu/hr]
密度K[pcu/km]
500台/hr
1000台/hr
1500台/hr
2000台/hr
2500台/hr
3000台/hr
実際に観測された交通流のQ-K関係
[Sugiyama et al., 2008] より引用
交通量を測定
シミュレーション結果
25](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-25-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
基本性能の検証と妥当性の確認 (5)
渋滞流のQ(交通流)-K(密度)特性
(パラメータと交通流率の関係)
検証に用いたパラメータ
反応遅れ時間 1.0[s]
最大加速度 2.5[m/s2](小型),
1.4[m/s2](大型)
希望速度 60[km/h]
大型車混入率 15%
0
500
1000
1500
2000
2500
3000
3500
0 50 100 150
交通量Q[pcu/hr]
密度K[pcu/km]
20km/hr
30km/hr
40km/hr
50km/hr
自由流
到着点発生点
1km…車両密度を測定
交通量を測定
シミュレーション条件
需要:3500[台/h]
相転移
実際に観測された交通流のQ-K関係
[Sugiyama et al., 2008] より引用
シミュレーション結果
ボトルネック:
制限速度50,40,30,20[km/h]
交通流のQ-K特性を表現できている
26](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-26-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
視覚認知モデルと交通事故
ドライバーの視野と視点移動を考慮したモデル
運転席から見える風景を画像化し,視界の中からのみ対象物を
「認知する」モデル → 交通事故の表現
周辺視野
中心視野
[藤井, 吉村, 高野, マルチエージェント交通流シミュレーションにおける交通事故モデリング, 人工知能学会論文誌,
Vol. 26, No. 1, pp. 42-49, 2011.]
30](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-30-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
経路選択の学習
学習機構を搭載した自動車エージェント
従来の(Dijkstra法,A*等の)経路選択アルゴリズムの問題点
– 運転者がネットワーク全体のコストを常時正確に取得可能
– 道路ネットワークの変更に瞬時に反応し,過渡状態が表現できない
– 本来の運転者は道路ネットワークの変更に応じて知識を徐々に修正するはず
Q学習を利用した経路選択アルゴリズム
31
道路ネットワークの知識を
試行錯誤的に獲得
過去の経路選択経験に邪魔され
過渡的な渋滞が発生
↓
道路ネットワークに関する知識を修正
[内田, 藤井, 吉村, 荒井, 道路ネットワークの変化に対する経路選択の学習, 情報処理学会論文誌, Vol. 53, No. 11,
pp. 2409-2418, 2012. ]](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-31-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
歩車混合交通シミュレーション
自動車系と歩行者系の連成シミュレーション
系の分離および双方の系の相互作用モデルを構築
自動車系
歩行者系
加速度 At
速度 Vt
位置 Xt
加速度at
速度 vt
位置 xt
加速度 At+Dt
速度 Vt+Dt
位置 Xt+Dt
加速度 at+Dt
速度 vt+Dt
位置 xt+Dt
時刻
渋谷駅前スクランブル交差点のシミュレーション
…
…
…
…
[藤井, 吉村, 知的マルチエージェント交通流シミュレータMATESの開発 第三報:多階層歩行者モデルの開発と
歩車混合交通シミュレーション, 日本シミュレーション学会論文誌, Vol. 3, No. 3, pp. 70-78, 2011.]
32](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-32-320.jpg)
![DEPARTMENT OF
SYSTEMS INNOVATION
工学系研究科 システム創成学専攻
二酸化炭素排出量の推定
排気排出量推定システムの構築
千葉県柏市を走行する車両の
CO2排出量の分布
– 走行距離が同じであっても,排出
量には大きな差があることを確認
ADVENTURE_MatesによるSIM結果
(各車の速度・加速度)
自動車排気排出量データベース(※)
道路地図
(勾配)
車両の特性や微視的な挙動を反映した
二酸化炭素排出量の推定が可能
※石油エネルギー技術センターによる
[Fujii, Yoshimura, Precise Evaluation of Vehicles Emission in Urban
Traffic Using Multi-agent-based Traffic Simulator MATES, CMES:
Computer Modeling in Engineering and Sciences, Vol. 88, No. 1, pp.
49-64, 2012. ]
33](https://image.slidesharecdn.com/150626advseminarmatessummarywebpub-180316031535/85/ADVENTURE_Mates-Ver-0-5b-33-320.jpg)


![[データマイニング+WEB勉強会][R勉強会] R言語によるクラスター分析 - 活用編](https://cdn.slidesharecdn.com/ss_thumbnails/cluster-100416230155-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Deep Learning 第6章 深層順伝播型ネットワーク](https://cdn.slidesharecdn.com/ss_thumbnails/deeplearning6-180601022208-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]SoftTriple Loss: Deep Metric Learning Without Triplet Sampling (ICCV2019)](https://cdn.slidesharecdn.com/ss_thumbnails/yokota20190920dlhack-190920011134-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Deep Anomaly Detection Using Geometric Transformations](https://cdn.slidesharecdn.com/ss_thumbnails/deepanomalydetectionusinggeometrictransformations-190329122109-thumbnail.jpg?width=640&height=640&fit=bounds)


















![ADVENTURE_BCtool Ver.2.の概要と実際[デモ]](https://cdn.slidesharecdn.com/ss_thumbnails/bctoolver2-6asdelivered-180316024120-thumbnail.jpg?width=640&height=640&fit=bounds)











