Download to read offline

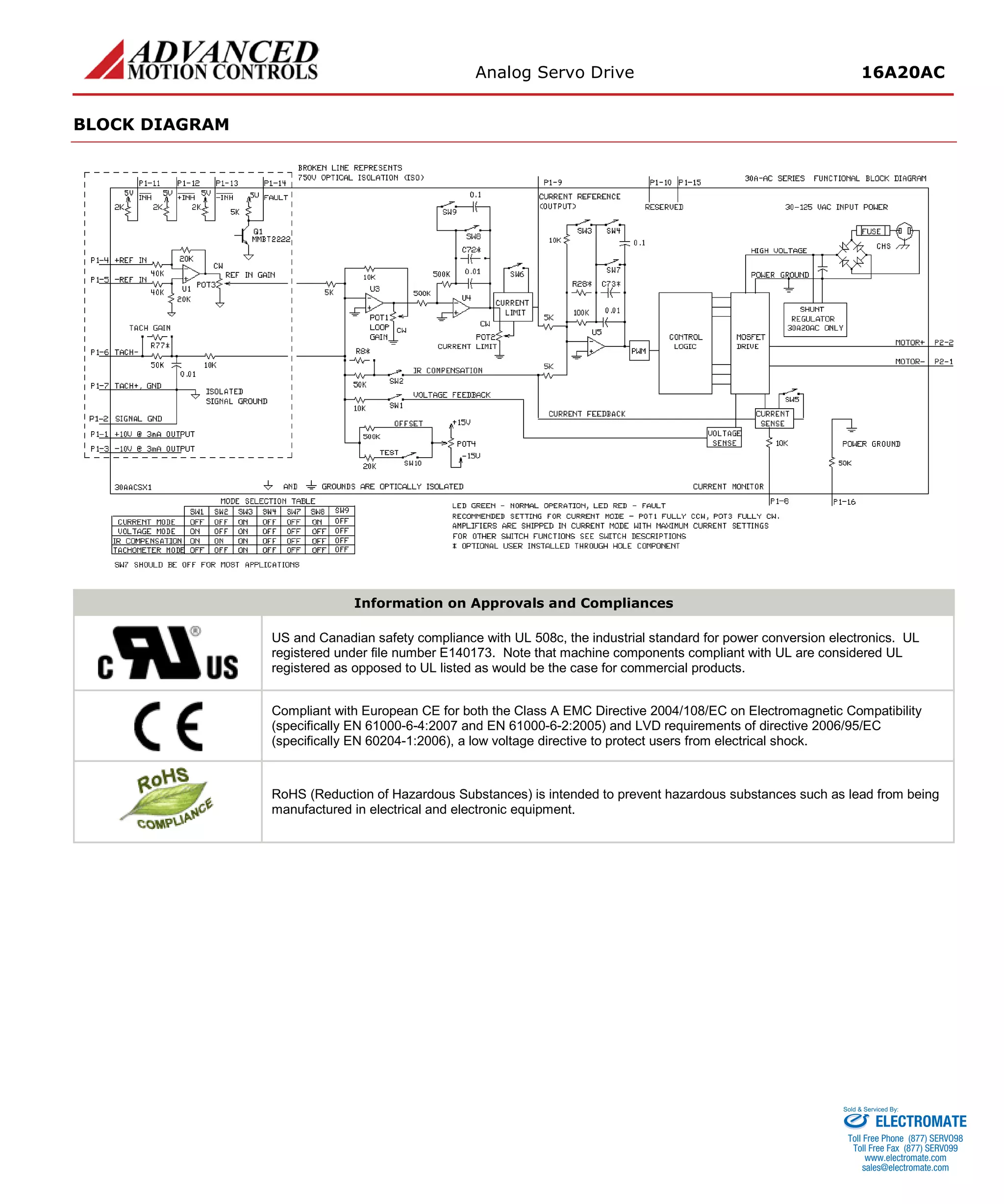
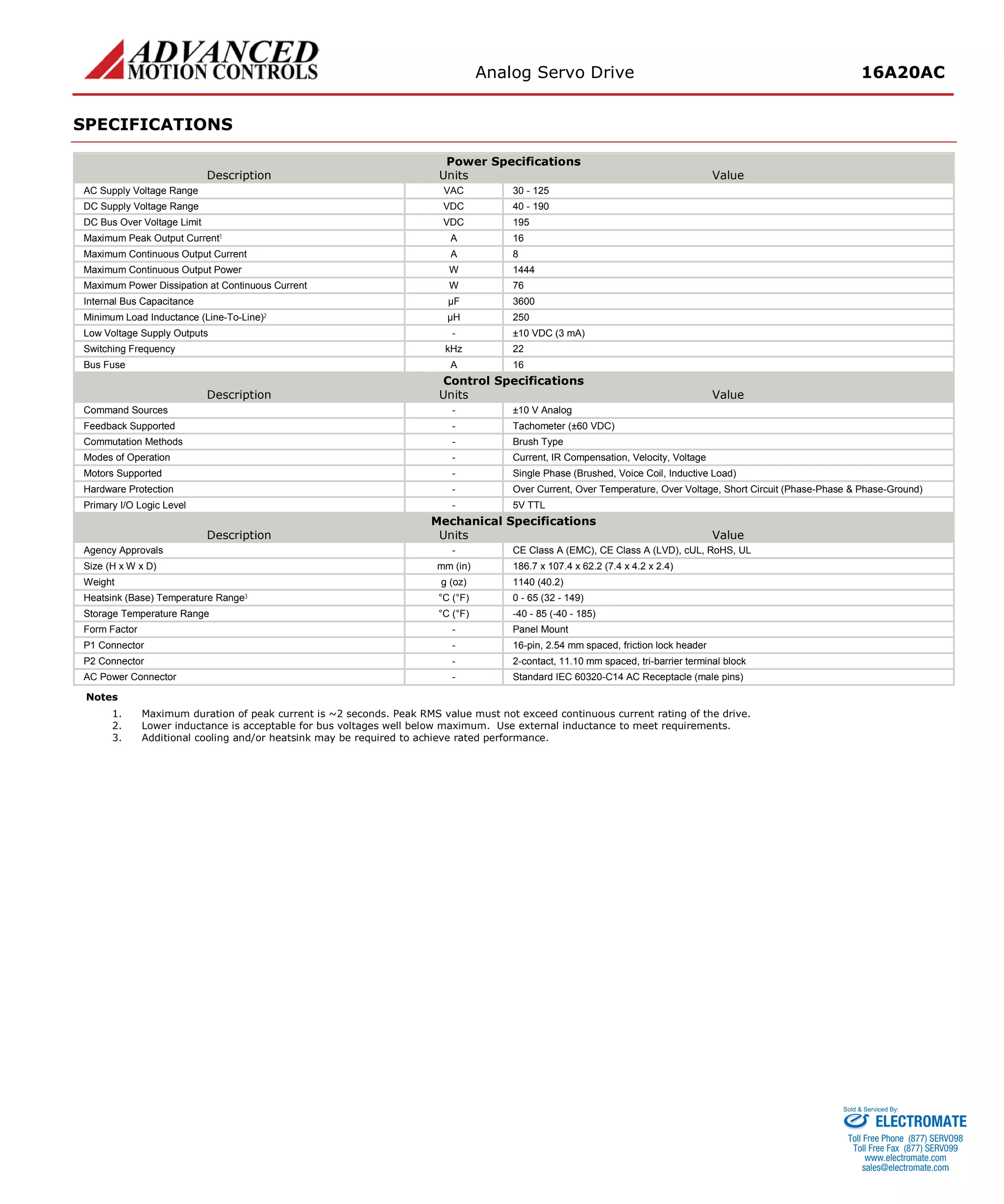
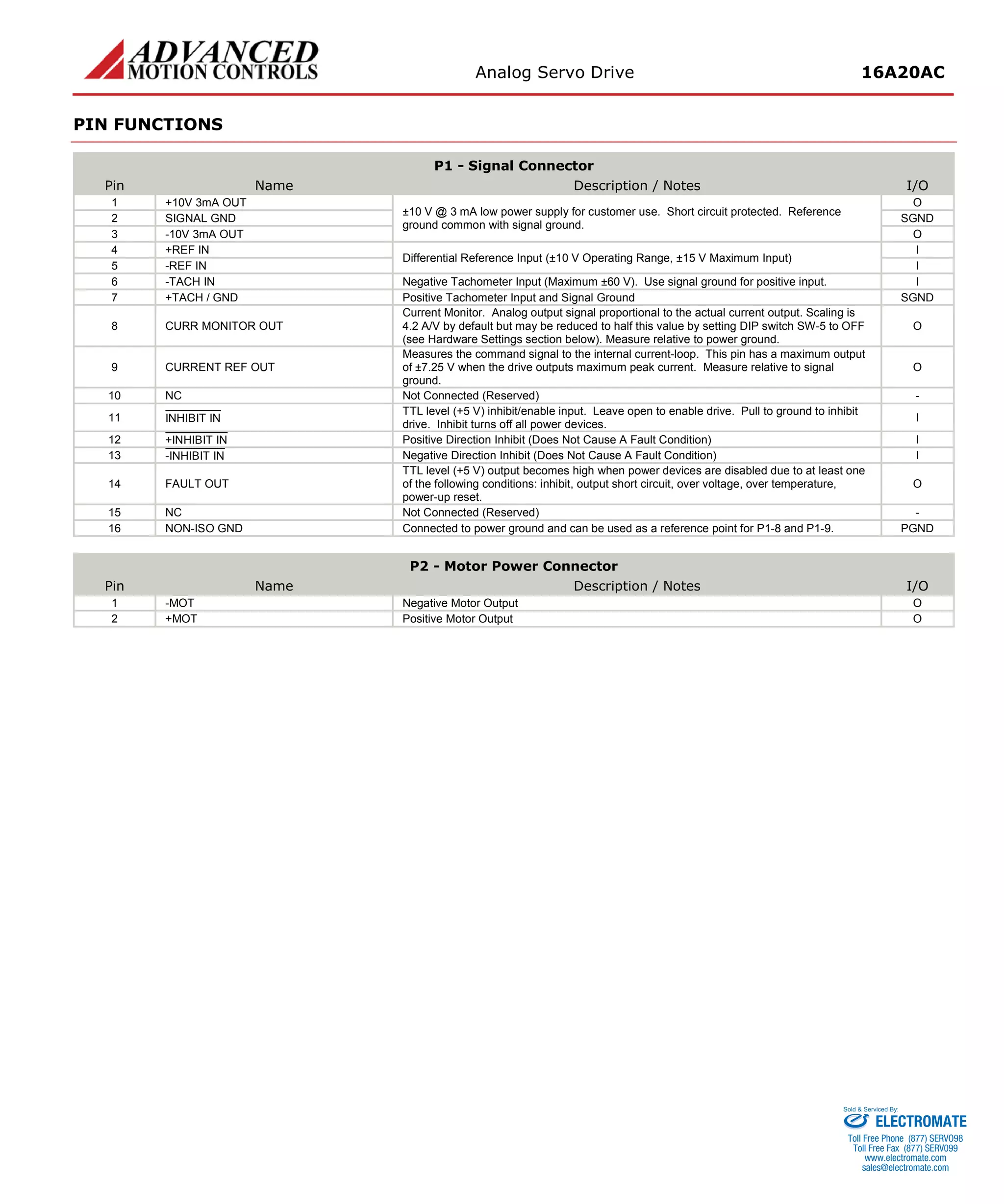
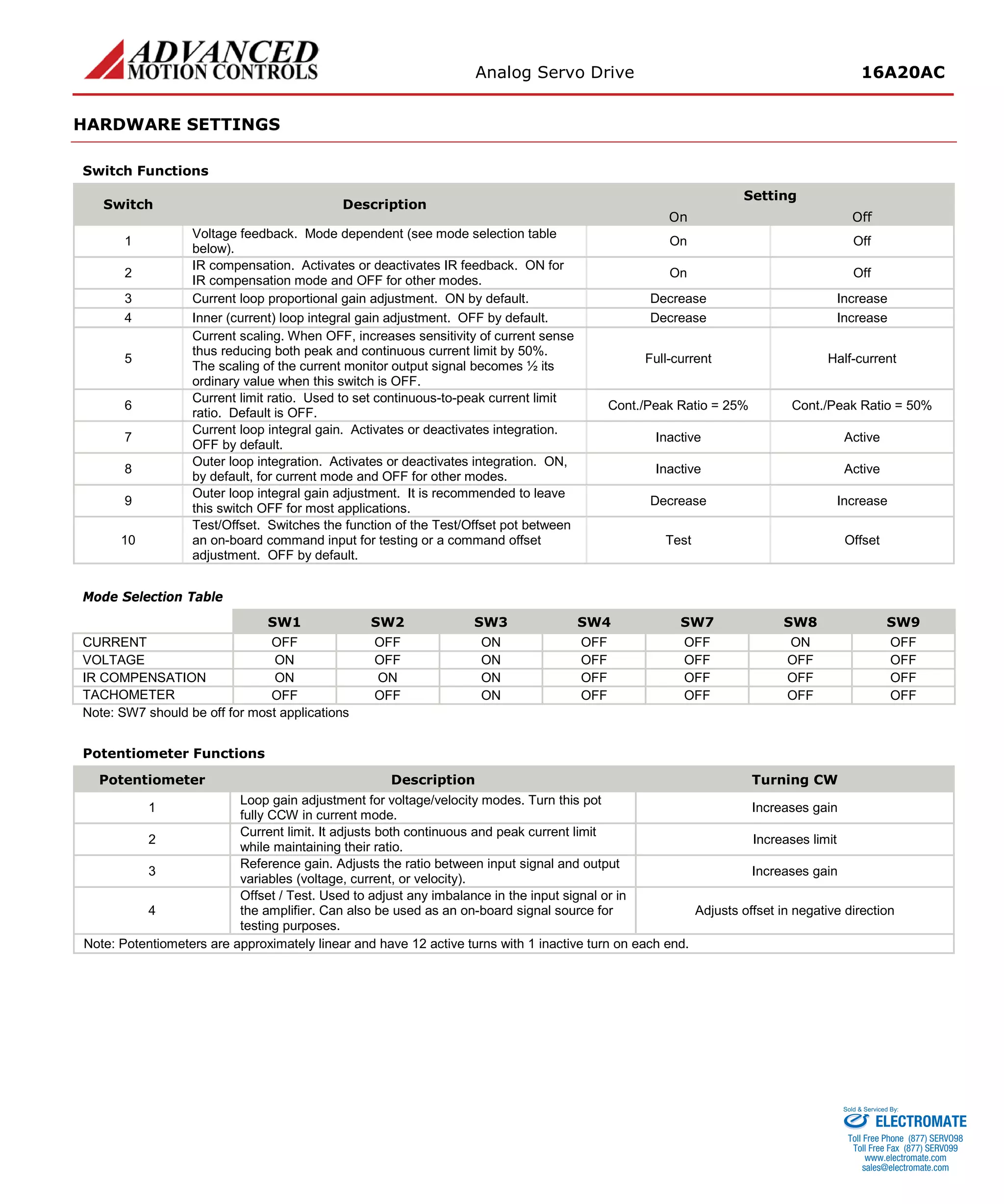
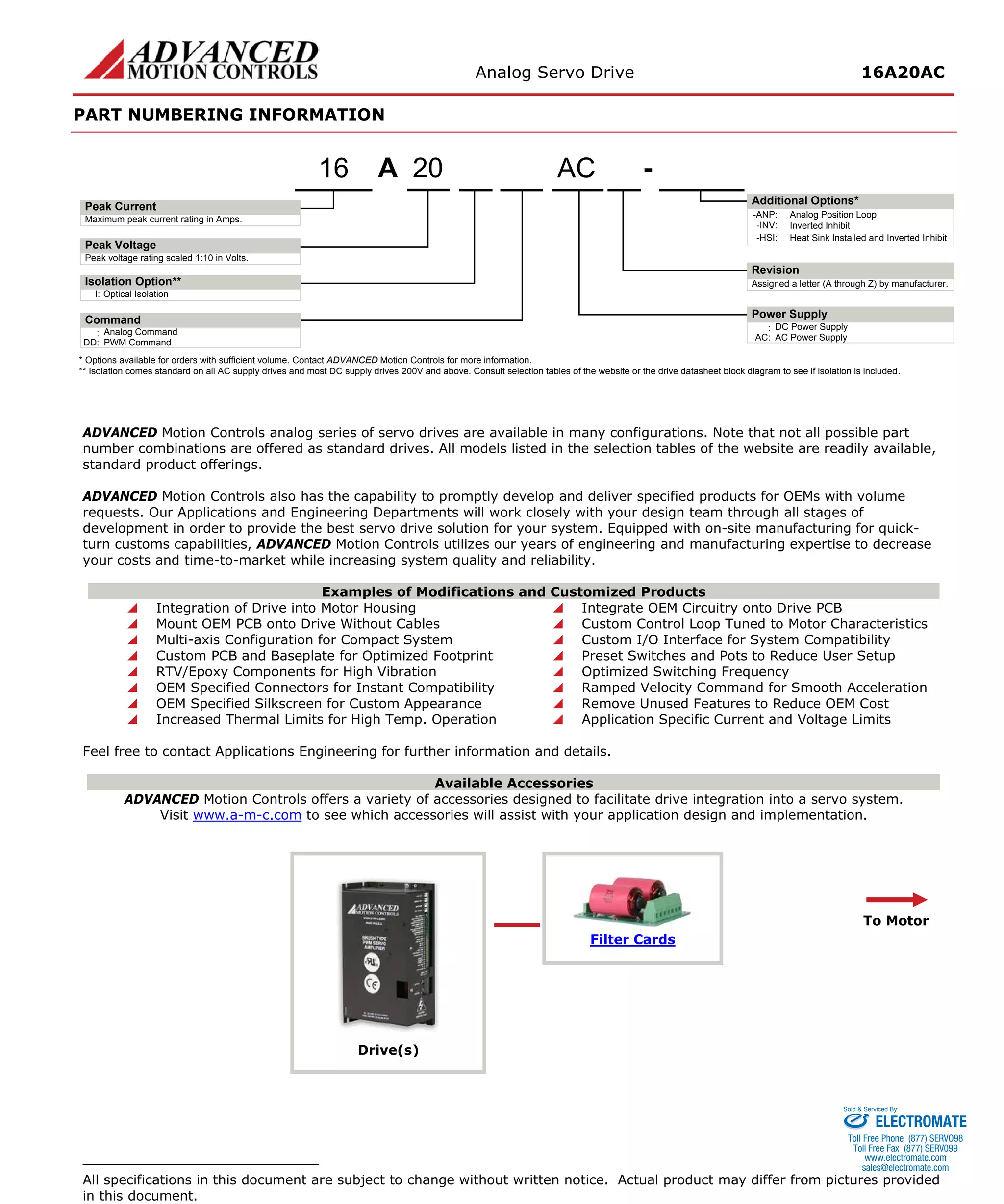

The document describes an analog servo drive that can drive DC motors. It provides peak and continuous current ratings of 16A and 8A respectively. It has features like adjustable current limits, high switching frequency, and fault monitoring. It can interface with digital controllers or operate standalone, and supports modes like current, voltage, and velocity control.


























































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)




![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)



