A single loop repetitive voltage controller for a four
•Download as PPTX, PDF•
0 likes•85 views

A single loop repetitive voltage controller for a four

Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (16)
Similar to A single loop repetitive voltage controller for a four
Similar to A single loop repetitive voltage controller for a four (20)
More from Wesam Rohouma
More from Wesam Rohouma (10)
Recently uploaded
Recently uploaded (20)
A single loop repetitive voltage controller for a four
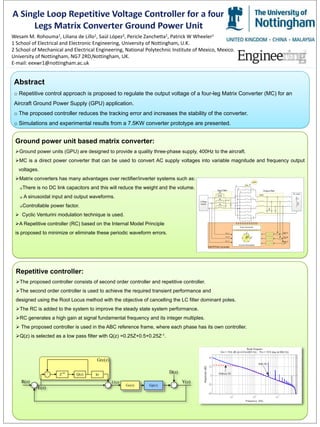
- 1. Abstract o Repetitive control approach is proposed to regulate the output voltage of a four-leg Matrix Converter (MC) for an Aircraft Ground Power Supply (GPU) application. o The proposed controller reduces the tracking error and increases the stability of the converter. o Simulations and experimental results from a 7.5KW converter prototype are presented. Ground power unit based matrix converter: Ground power units (GPU) are designed to provide a quality three-phase supply, 400Hz to the aircraft. MC is a direct power converter that can be used to convert AC supply voltages into variable magnitude and frequency output voltages. Matrix converters has many advantages over rectifier/inverter systems such as: There is no DC link capacitors and this will reduce the weight and the volume. A sinusoidal input and output waveforms. Controllable power factor. Cyclic Venturini modulation technique is used. A Repetitive controller (RC) based on the Internal Model Principle is proposed to minimize or eliminate these periodic waveform errors. Repetitive controller: The proposed controller consists of second order controller and repetitive controller. The second order controller is used to achieve the required transient performance and designed using the Root Locus method with the objective of cancelling the LC filter dominant poles. The RC is added to the system to improve the steady state system performance. RC generates a high gain at signal fundamental frequency and its integer multiples. The proposed controller is used in the ABC reference frame, where each phase has its own controller. Q(z) is selected as a low pass filter with Q(z) =0.25Z+0.5+0.25Z-1. Wesam M. Rohouma1, Liliana de Lillo1, Saúl López2, Pericle Zanchetta1, Patrick W Wheeler1 1 School of Electrical and Electronic Engineering, University of Nottingham, U.K. 2 School of Mechanical and Electrical Engineering, National Polytechnic Institute of Mexico, Mexico. University of Nottingham, NG7 2RD,Nottingham, UK. E-mail: eexwr1@nottingham.ac.uk
- 2. Response to voltage step change Results and discussion: A 7.5KVA experimental prototype was successfully built to validate the effectiveness of the proposed controller. Conclusions Steady state operation: 0.02 0.025 0.03 0.035 0.04 -120 -80 -40 0 40 80 120 Time Voltage 0 0.01 0.02 0.03 0.04 0.05 0.06 -8 -6 -4 -2 0 2 4 6 8 Time Current(Amp) 0 1000 2000 3000 4000 5000 6000 0 20 40 60 80 100 Frequency (Hz) THD= 1.18% Mag(%ofFundamental) Unbalanced load test: Output voltage and currents during ±30% load unbalance 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 -120 -80 -40 0 40 80 120 Time Votage 0 1000 2000 3000 4000 5000 6000 0 20 40 60 80 100 Frequency (Hz) THD= 3.14% Mag(%ofFundamental) 0 0.01 0.02 0.03 0.04 0.05 0.06 -8 -6 -4 -2 0 2 4 6 8 Time Current(Amp) Load disconnection and connection: Wesam M. Rohouma1, Liliana de Lillo1, Saúl López2, Pericle Zanchetta1, Patrick W Wheeler1 1 School of Electrical and Electronic Engineering, University of Nottingham, U.K. 2 School of Mechanical and Electrical Engineering, National Polytechnic Institute of Mexico, Mexico. University of Nottingham, NG7 2RD,Nottingham, UK. E-mail: eexwr1@nottingham.ac.uk Four-Leg Matrix Converter was presented as GPU for aircraft servicing application. A controller consists of plug-in Repetitive controller and second order controller is proposed. Single voltage control loop implemented in ABC reference frame. Extensive experimental tests showed that the controller was able to offer high tracking accuracy, fast transient response. The proposed controller was able to regulate the output voltage during different loading with minimum distortion. 0.04 0.042 0.044 0.046 0.048 0.05 0.052 0.054 -120 -80 -40 0 40 80 120 Time Voltage VRef-A VFB-A Ia Ib Ic In 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 60 70 80 90 100 110 Time Voltage VRef Vom