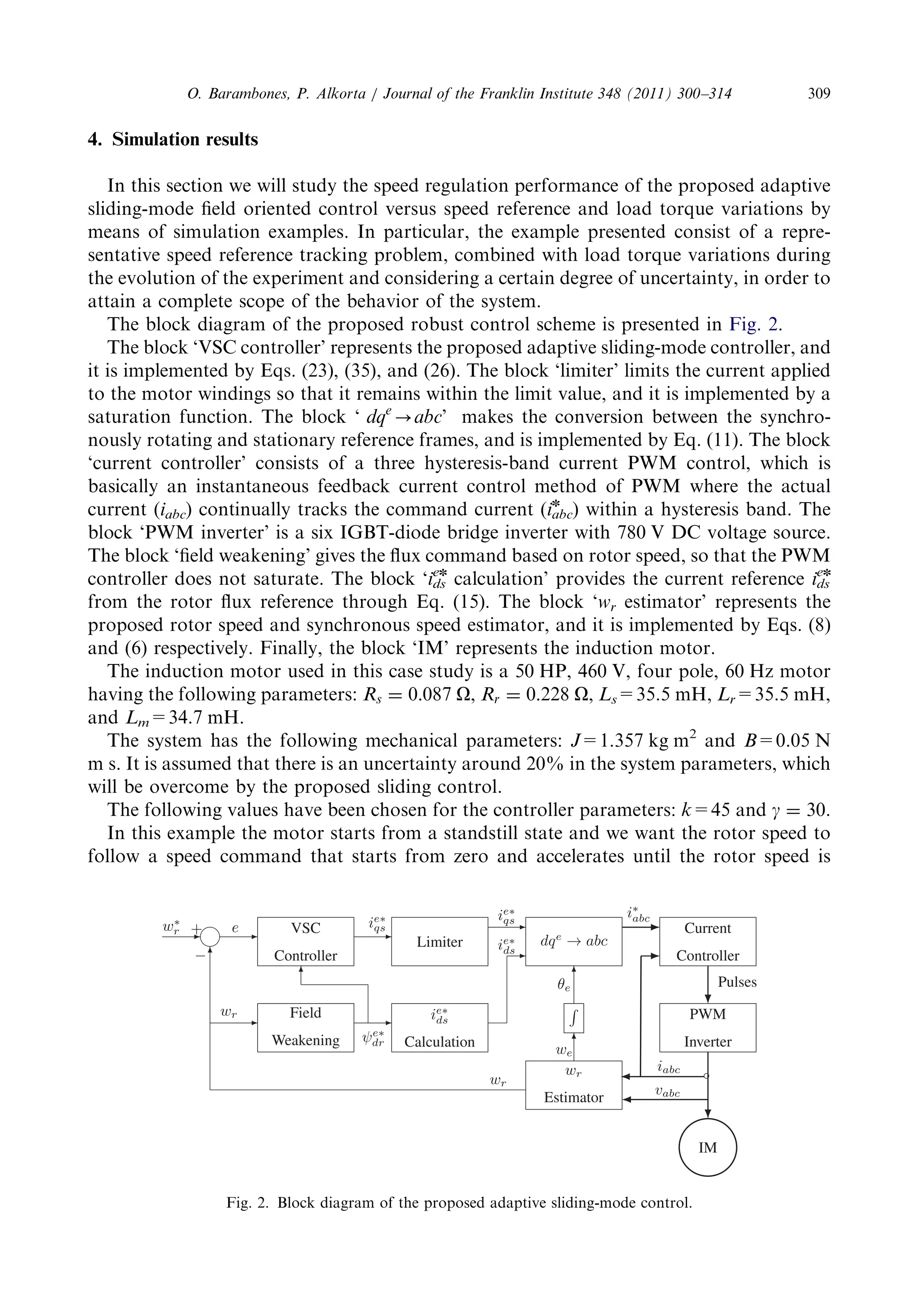
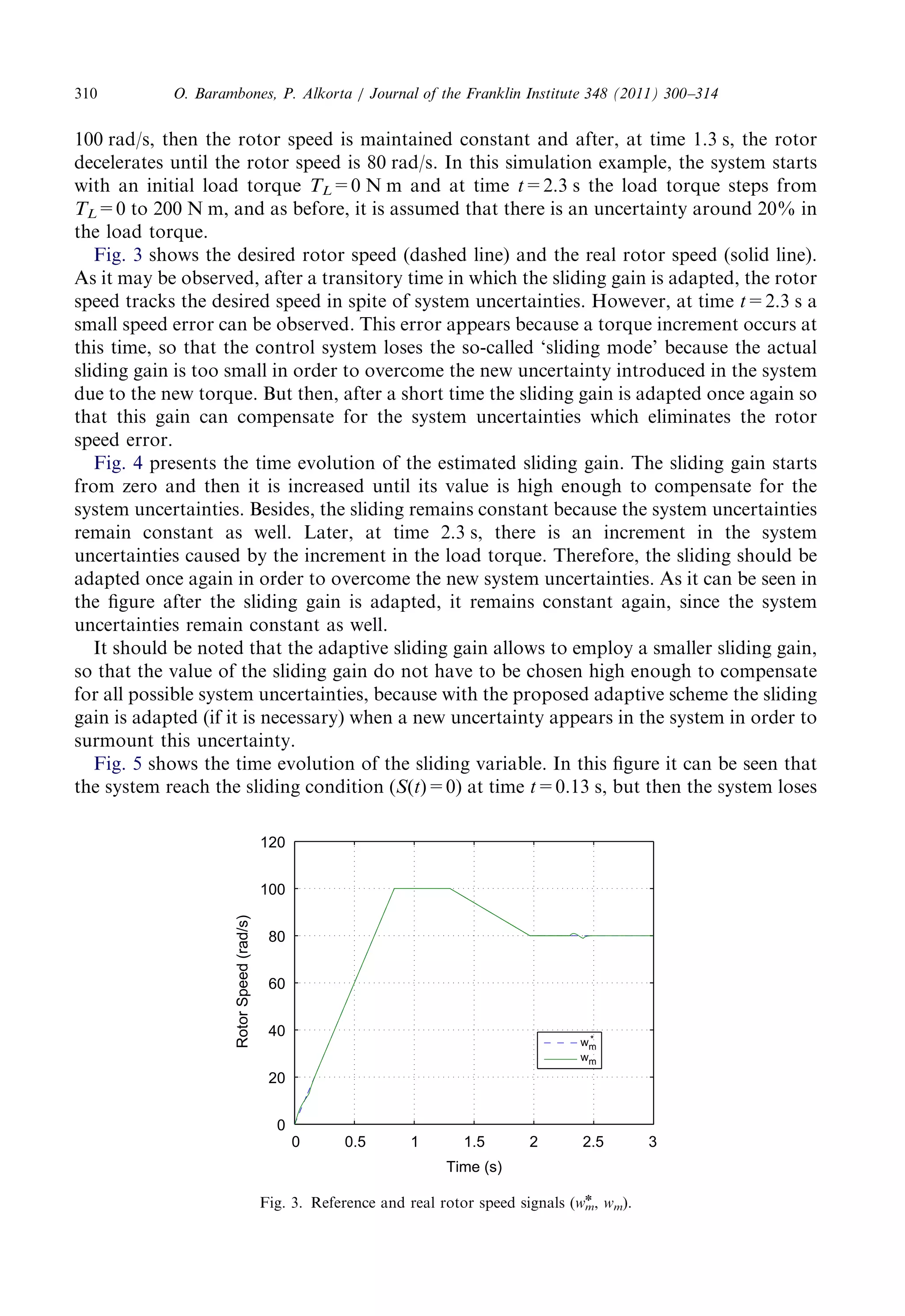
This document presents a novel adaptive sliding-mode control system to control the speed of an induction motor drive. The control system uses vector (field-oriented) control theory for induction motor drives and incorporates an adaptive sliding-mode control law. This adaptive law calculates the sliding gain online without needing to determine an upper bound on system uncertainties. Simulation results show the proposed controller provides high performance, is robust to parameter variations and external load disturbances, and reduces chattering compared to traditional sliding-mode controllers.
![a simplercontrol.Besides,ACmachinespresentedsomedisadvantagesincomparisonwith
DC ones,ashighercost,higherrotorinertiaand maintenanceproblems.Nevertheless,inthe
last twoorthreedecadeswehaveseenextensiveresearchanddevelopmenteffortsinvariable-
frequency,variable-speedAC machinedrivestechnology [1], whichhaveovercomesomeofthe
abovedisadvantagesoftheACmotors.
The developmentoffieldorientedcontrolinthebeginningof1970smadeitfeasibleto
control theinductionmotorasaseparatelyexcitedDCmotor [1–3]. Inthissense,thefield-
orientedtechniqueguaranteesthedecouplingoftorqueandfluxcontrolcommandsforthe
inductionmotor.Thismeansthatwhenthefluxisgovernedbymeansofcontrollingthe
current id, thetorqueisnotaffected.Similarly,whenthetorqueisgovernedbycontrolling
the current iq, thefluxisnotaffectedand,therefore,itcanbeachievedtransientresponse
as fastasinthecaseofDCmachines.
On theotherhand,whendealingwithindirectfield-orientedcontrolofinduction
motors,aknowledgeofrotorspeedisrequiredinordertoorienttheinjectedstatorcurrent
vector andtoestablishanadequatespeedfeedbackcontrol.Althoughtheuseofaflux
estimatorindirectfieldorientedcontroleliminatestheneedofthespeedsensorinorderto
orient theinjectedstatorcurrentvector,thismethodisnotpractical.Thisisbecausethe
flux estimatordoesnotworkproperlyinalowspeedregion.Thefluxestimatorpresentsa
pole ontheoriginofthe S plane (pureintegrator),andthereforeitisverysensitivetothe
offset ofthevoltagesensorandtheparametervariations.
However,thespeedorpositionsensorofinductionmotorstilllimitsitsapplicationsto
somespecialenvironmentsnotonlyduetothedifficultiesofmountingthesensor,butalso
becauseoftheneedoflowcostandreliablesystems.Theresearchanddevelopmentworkon
a sensorlessdriverfortheACmotorisprogressinggreatly.Muchworkhasbeendoneusing
thefieldorientedbasedmethodapproach [4–7]. Intheseschemesthespeedisobtainedbased
onthemeasurementofstatorvoltagesandcurrents.Ontheotherhand,theinductionmotor
modelcanbeobtainedusingaNeuralNetworkapproach.IntheworkofAlanisetal. [8]
a discrete-timenonlinearsystemidentificationviarecurrenthighorderneuralnetworksis
proposed.Inthisworkasixth-orderdiscrete-timeinductionmotormodelinthestatorfixed
referenceframeiscalculatedusingtheproposedrecurrentneuralnetworksscheme.
Nevertheless,therobustnesstoparametervariationsandloaddisturbancesinthe
inductionmachinesstilldeservestobefurtherstudiedand,inparticular,specialattention
should bepaidtothelowspeedregiontransients.
Thus, theperformanceofthefieldorientedcontrolstronglydependsonuncertainties,
which areusuallyduetounknownparameters,parametervariations,externalload
disturbances,unmodelledandnonlineardynamics,etc.Therefore,manystudieshavebeen
made onthemotordrivesinordertopreservetheperformanceundertheseparameter
variationsandexternalloaddisturbances,suchasnonlinearcontrol,optimalcontrol,
variablestructuresystemcontrol,adaptivecontrol,neuralcontrolandfuzzycontrol
[9–13]. Recently,thegeneticalgorithmapproachhasalsobeenusedinordertocontrolthe
electric motors.TheworkofMontazeri-Ghetal. [14], describestheapplicationofthe
geneticalgorithmfortheoptimizationofthecontrolparametersinparallelhybridelectric
vehiclesdrivenbyanelectricinductionmachine.
To overcometheabovesystemuncertainties,the variablestructurecontrolstrategyusing
the sliding-modehasbeenfocussedonmanystudiesandresearchforthecontroloftheAC
servo drivesysteminthepastdecade [15–19]. Thesliding-modecontrolcanoffermanygood
properties,suchasgoodperformanceagainstunmodelled dynamics,insensitivitytoparameter
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 301](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-2-2048.jpg)
![variations,externaldisturbance rejection andfastdynamicresponse [20]. Theseadvantagesof
the sliding-modecontrolmaybeemployedinthepositionandspeedcontrolofanACservo
system.
The robustpropertiesofthesliding-modesystemsarealsobeenemployedinthe
observersdesign [21]. Inthisworkanobserver-basedsliding-modecontrolproblemis
investigatedforaclassofuncertaindeltaoperatorsystemswithnonlinearexogenous
disturbanceandthecontrolsystemstabilityisdemonstratedusingtheLyapunovstability
theory. IntheworkofBoiko [22] the estimationprecisionandbandwidthofsliding-mode
observersareanalyzedinthefrequencydomainfordifferentsettingsoftheobserverdesign
parameters.Inthispaperanexampleofsliding-modeobserverdesignforestimationofDC
motor speedfromthemeasurementsofarmaturecurrentisconsidered.
A position-and-velocitysensorlesscontrolforbrushlessDCmotorsusinganadaptive
sliding modeobserverisproposedinFuruhashi [23]. Inthisworkasliding-modeobserver
is proposedinordertoestimatethepositionandvelocityforbrushlessDCmotors.Then,
the velocityofthesystemisregulatedusingaPIcontrol.Asensorlesssliding-modetorque
control forinductionmotorsusedinhybridelectricvehicleapplicationsisdevelopedin
Proca etal. [24]. Thesliding-modecontrolproposedinthisworkallowsforfastandprecise
torque trackingoverawiderangeofspeed.Thepaperalsopresentstheidentificationand
parameterestimationofaninductionmotormodelwithvaryingparameters.Inthepaper
[25] a surveyofapplicationsofsecond-ordersliding-modecontroltomechanicalsystemsis
presented.Inthispaperdifferentsecond-ordersliding-modecontrollers,previously
presentedintheliterature,areshownandsomechallengingcontrolproblemsinvolving
mechanicalsystemsareaddressedandsolved.Arobustsliding-modesensorlessspeed-
control schemeofavoltage-fedinductionmotorisproposedinRashedetal. [26]. Inthis
work asecond-orderslidingmodeisproposedinordertoreducethechatteringproblem
that usuallyappearsinthetraditionalsliding-modecontrollers.IntheworkofAuroraand
Ferrara [27] a sliding-modecontrolalgorithmforcurrent-fedinductionmotorsis
presented.Inthispaperisproposedanadaptivesecond-ordersliding-modeobserverfor
speed androtorflux,andtheloadtorqueandtherotortimeconstantarealsoestimated.
Thehigherorderslidingmode(HOSM)proposedinthiswork,presentsomeadvantagesover
standardsliding-modecontrolschemes,oneofthemostimportantisthechatteringreduction.
However intheHOSManaccurateknowledgeofrotorfluxandmachineparametersisthekey
factorinordertoobtainahigh-performanceandhigh-efficiencyinduction-motorcontrol
scheme. Then,thesecontrolschemesrequireamorepreciseknowledgeofthesystemparameters
or theuseofestimatorsinordertocalculatethesystemparameters,whichimpliesmore
computationalcostthantraditionalsliding-modecontrollers.
On theotherhand,theslidingcontrolschemesrequirepriorknowledgeoftheupperbound
for thesystemuncertaintiessincethisboundis employed intheswitchinggaincalculation.
It shouldbenotedthatthechoiceofsuchboundmaynotbeeasilyobtainedduetothe
complicatedstructureoftheuncertainties inpracticalcontrolsystems [28,29]. Moreover,this
upperboundshouldbedeterminedasaccurately aspossible,becausethevaluetobe
considered fortheslidinggainincreaseswiththe bound,andthereforethecontroleffortwillbe
also proportionaltothisbound.Hence,ahigh upperboundforthesystemuncertainties
implies morecontroleffortandtheproblemofthechatteringwillbeincreased.
In ordertosurmountthisdrawback,inthispaperisproposedanadaptivelawinorder
to calculatetheslidinggain.Therefore,inourproposedadaptivesliding-modecontrol
scheme wedonotneedtocalculateanupperboundofthesystemuncertainties,which
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 302](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-3-2048.jpg)
![greatlysimplifiesthecontrollerdesign.Moreover,thisupperboundcanbeunknownand
can bevariablealongthetimebecausetheslidinggainisadaptedon-line.
In thissense,thispaperpresentsanewsensorlessvectorcontrolschemeconsistingon
the onehandofaspeedestimationalgorithmsothatthereisnoneedforaspeedsensor
and ontheotherhandofanadaptativevariablestructurecontrollawwithanintegral
sliding surfacethatcompensatesfortheuncertaintiesinthesystem.Intheproposed
adaptivesliding-modecontrolscheme,unlikethetraditionalsliding-modecontrolschemes,
the slidinggainisnotcalculatedinadvance,becauseitisestimatedon-lineinorderto
compensatethepresentsystemuncertaintiesthatcanbevariablesalongthetime.
Using thisvariablestructurecontrolintheinductionmotordrive,thecontrolledspeedis
insensitivetovariationsinthemotorparametersandloaddisturbances.Thisvariable
structurecontrolprovidesagoodtransientresponseandexponentialconvergenceofthe
speed trajectorytrackingdespiteparameteruncertaintiesandloadtorquedisturbances.
The closedloopstabilityoftheproposedschemeisdemonstratedusingLyapunov
stabilitytheory,andtheexponentialconvergenceofthecontrolledspeedisalsoprovided.
Thisreportisorganizedasfollows.Therotor speedestimationisintroducedinSection2.
Then, theproposedrobustspeedcontrolwithadaptativeslidinggainispresentedinSection3.
In Section4,somesimulationresultsarepresented.Finally,concludingremarksarestatedin
the lastsection.
2. Rotorspeedcomputation
Many schemesbasedonsimplifiedmotormodelshavebeendevisedtosensethespeedof
the inductionmotorfrommeasuredterminalquantitiesforcontrolpurposes.Inorderto
obtain anaccuratedynamicrepresentationofthemotorspeed,itisnecessarytobasethe
calculationonthecoupledcircuitequationsofthemotor.
Since themotorvoltagesandcurrentsaremeasuredinastationaryframeofreference,it
is alsoconvenienttoexpresstheseequationsinthatstationaryframe.
From thestatorvoltageequationsinthestationaryframeitisobtained [3]:
_c
dr ¼
Lr
Lm
vds
Lr
Lm
Rs þ sLs
d
dt
ids ð1Þ
_c
qr ¼
Lr
Lm
vqs
Lr
Lm
Rs þ sLs
d
dt
iqs ð2Þ
where c is thefluxlinkage; L is theinductance; v is thevoltage; R is theresistance; i is the
current and s ¼ 1L2
m=ðLrLsÞ is themotorleakagecoefficient.Thesubscripts r and s
denoterespectivelytherotorandstatorvaluesreferredtothestator,andthesubscripts d
and q denote the dq-axiscomponentsinthestationaryreferenceframe.
The rotorfluxequationsinthestationaryframeare [3]
_c
dr ¼
Lm
Tr
idswrcqr
1
Tr
cdr ð3Þ
_c
qr ¼
Lm
Tr
iqs þ wrcdr
1
Tr
cqr ð4Þ
where wr is therotorelectricalspeedand Tr=Lr/Rr is therotortimeconstant.
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 303](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-4-2048.jpg)
![The angle ye of therotorfluxvector(cr ) inrelationtothe d-axisofthestationaryframe
is definedasfollows:
ye ¼ arctan
cqr
cdr
ð5Þ
being itsderivative:
_y
e ¼ we ¼
cdr
_c
qrcqr
_c
dr
c2
dr þ c2
qr
ð6Þ
SubstitutingEqs.(3)and(4)inEq.(6)itisobtained:
we ¼ wr
Lm
Tr
cdriqscqrids
c2
dr þ c2
qr
!
ð7Þ
Then, substitutingEq.(6)inEq.(7),andsolvingfor wr we obtain
wr ¼
1
c2
r
cdr
_c
qrcqr
_c
dr
Lm
Tr
ðcdriqscqridsÞ
ð8Þ
where c2
r ¼ c2
dr þ c2
qr.
Therefore,givenacompleteknowledgeofthemotorparameters,theinstantaneous
speed wr can becalculatedfromthepreviousequation,wherethestatormeasuredcurrent
and voltages,andtherotorfluxestimationobtainedfromarotorfluxobserverbasedon
Eqs. (1)and(2)havebeenemployed.
3. Variablestructurerobustspeedcontrolwithadaptiveslidinggain
In general,themechanicalequationofaninductionmotorcanbewrittenas
Jw_ m þ Bwm þ TL ¼ Te ð9Þ
where J and B are theinertiaconstantandtheviscousfrictioncoefficientoftheinduction
motorsystemrespectively; TL is theexternalload; wm is therotormechanicalspeedin
angularfrequency,whichisrelatedtotherotorelectricalspeedby wm=2wr/p where p is the
polenumbers,and Te denotesthegeneratedtorqueofaninductionmotor,definedas [3]
Te ¼
3p
4
Lm
Lr
ðce
drie
qsce
qrie
dsÞ ð10Þ
where ce
dr and ce
qr are therotor-fluxlinkages,thesubscript‘e’denotesthatthequantityis
referredtothesynchronouslyrotatingreferenceframe; iqs
e and ids
e are thestatorcurrents,
and p is thepolenumber.
The relationbetweenthesynchronouslyrotatingreferenceframeandthestationary
reference frameiscomputedbytheso-calledreversePark’stransformation:
xa
xb
xc
2
64
3
75
¼
cosðyeÞ sinðyeÞ
cosðye2p=3Þ sinðye2p=3Þ
cosðye þ 2p=3Þ sinðye þ 2p=3Þ
2
64
3
75
xd
xq
#
ð11Þ
where ye is theanglepositionbetweenthe d-axis ofthesynchronouslyrotatingandthe
stationaryreferenceframes,andthequantitiesareassumedtobebalanced.
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 304](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-5-2048.jpg)
![Using thefield-orientationcontrolprinciple [3] the currentcomponent ids
e is alignedin
the directionoftherotorfluxvector cr, andthecurrentcomponent iqs
e is alignedinthe
directionperpendiculartoit.Undertheseconditions,itissatisfiedthat
ce
qr ¼ 0; ce
dr ¼ jcrj ð12Þ
Fig. 1 shows thevectorialdiagramoftheinductionmotorinthestationaryandinthe
synchronouslyrotatingreferenceframes.Thesubscripts‘s’indicatesthestationaryframe
and thesubscript‘e’indicatesthesynchronouslyrotatingreferenceframe.
Therefore,takingintoaccountthepreviousresults,theequationofinductionmotor
torque (10)issimplifiedto
Te ¼
3p
4
Lm
Lr
ce
drie
qs ¼ KT ie
qs ð13Þ
wherethetorqueconstant, KT, isdefinedasfollows:
KT ¼
3p
4
Lm
Lr
ce
dr ð14Þ
ce
dr being thecommandrotorflux.
With theabove-mentionedfieldorientation,thedynamicsoftherotorfluxisgivenby [3]
dce
dr
dt
þ
ce
dr
Tr
¼
Lm
Tr
ie
ds ð15Þ
Then, themechanicalequation(9)becomes
w_ m þ awm þ f ¼ bie
qs ð16Þ
Fig. 1.Vectorialdiagramoftheinductionmotor.
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 305](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-6-2048.jpg)
![where theparametersaredefinedas
a ¼
B
J
; b ¼
KT
J
; f ¼
TL
J
ð17Þ
Now,wearegoingtoconsiderthepreviousmechanicalequation(16)withuncertainties
as follows:
w_ m ¼ ða þ DaÞwmðf þ DfÞ þ ðb þ DbÞie
qs ð18Þ
where theterms Da, Db and Df representtheuncertaintiesoftheterms a, b and f
respectively.Itshouldbenotedthattheseuncertaintiesareunknown,andthattheprecise
calculationofanupperboundis,ingeneral,ratherdifficulttoachieve.
Let usdefinethetrackingspeederrorasfollows:
eðtÞ ¼ wmðtÞw
mðtÞ ð19Þ
where wm
n is therotorspeedcommand.
Takingthederivativeofthepreviousequationwithrespecttotimeyields
e_ðtÞ ¼ w_ mw_
m ¼ aeðtÞ þ uðtÞ þ dðtÞ ð20Þ
where thefollowingtermshavebeencollectedinthesignal u(t):
uðtÞ ¼ bie
qsðtÞaw
mðtÞf ðtÞw_
mðtÞ ð21Þ
and theuncertaintytermshavebeencollectedinthesignal d(t),
dðtÞ ¼ DawmðtÞDf ðtÞ þ Dbie
qsðtÞ ð22Þ
To compensatefortheabovedescribeduncertaintiespresentinthesystem,asliding
adaptivecontrolschemeisproposed.Intheslidingcontroltheory,theswitchinggainmust
be constructedsoastoattaintheslidingcondition [20,30]. Inordertomeetthisconditiona
suitable choiceoftheslidinggainshouldbemadetocompensatefortheuncertainties.To
select theslidinggainvector,anupperboundoftheparametervariations,unmodelled
dynamics,noisemagnitudes,etc.shouldbegiven,butinpracticalapplicationsthereare
situationsinwhichtheseboundsareunknown,oratleastdifficulttocalculate.Asolution
could betochooseasufficientlyhighvaluefortheslidinggain,butthisapproachcould
cause atoohighcontrolsignal,oratleastmorecontrolactivitythanneededinorderto
achieve thecontrolobjective.
One possiblewaytoovercomethisdifficultyistoestimatethegainandtoupdateitby
means ofsomeadaptationlaw,sothattheslidingconditionisachieved.
Now,wearegoingtoproposetheslidingvariable S(t) withanintegralcomponentas
SðtÞ ¼ eðtÞ þ
Z t
0
ða þ kÞeðtÞ dt ð23Þ
where k is aconstantgain,and a is aparameterthatwasalreadydefinedinEq.(17).
Then theslidingsurfaceisdefinedas
SðtÞ ¼ eðtÞ þ
Z t
0
ða þ kÞeðtÞ dt ¼ 0 ð24Þ
Now, wearegoingtodesignavariablestructurespeedcontroller,thatincorporatesan
adaptiveslidinggain,inordertocontroltheACmotordrive
uðtÞ ¼ keðtÞ^b
ðtÞg sgnðSÞ ð25Þ
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 306](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-7-2048.jpg)
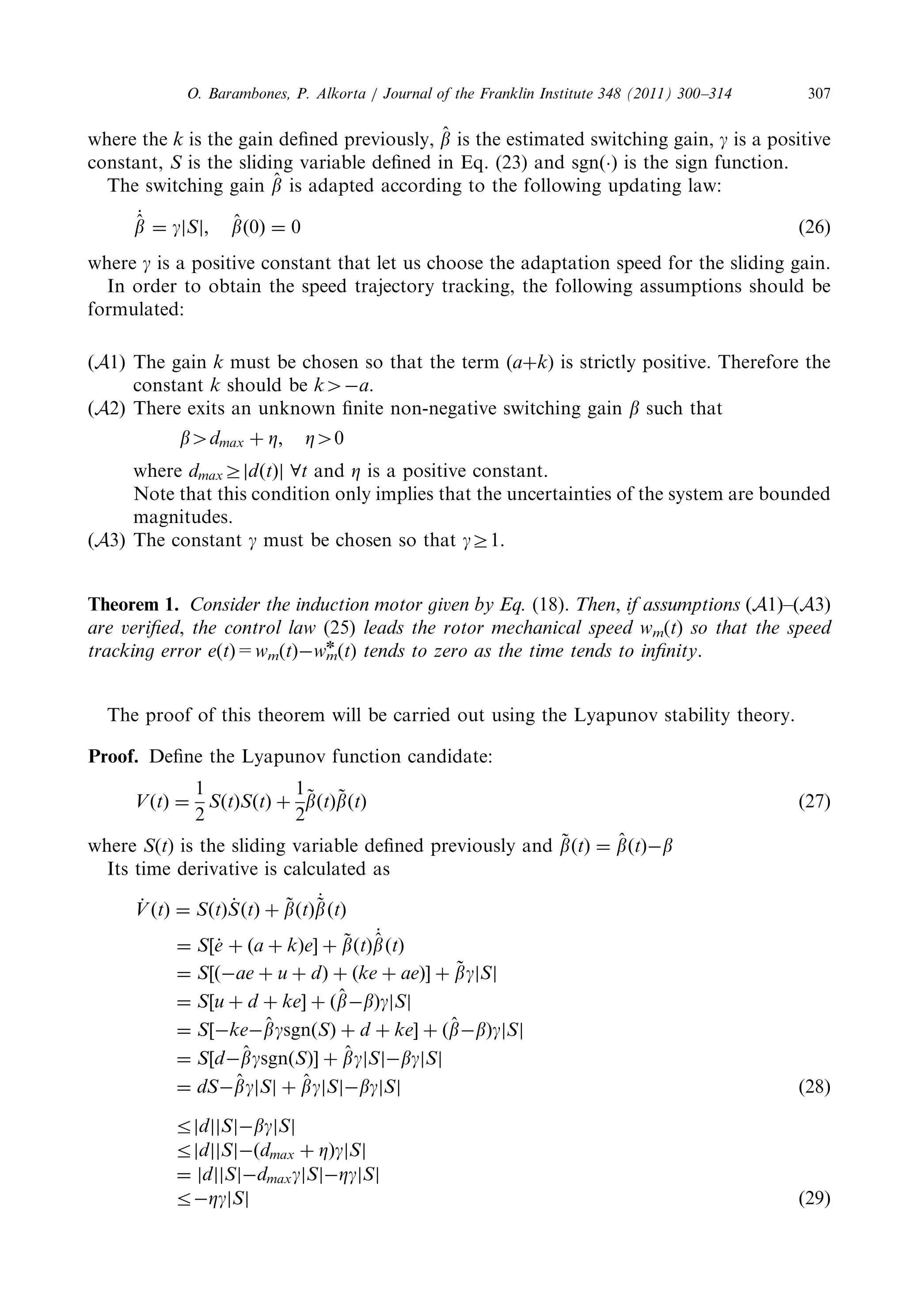
![then
_V
ðtÞr0 ð30Þ
It shouldbenotedthatEqs.(23),(20),(25)and(26),andtheassumptions ðA2Þ and ðA3Þ
have beenusedintheproof.
UsingLyapunov’sdirectmethod,since V(t) isclearlypositive-definite, _V
ðtÞ is negative
semidefiniteand V(t) tendstoinfinityas S(t) and ~b
ðtÞ tends toinfinity,thentheequilibrium
at theorigin ½SðtÞ; ~b
ðtÞ ¼½0; 0 is globallystable,andthereforethevariables S(t) and ~b
ðtÞ
are bounded.Then,since S(t) isboundedonehasthat e(t) isalsobounded.
Besides,computingthederivativeofEq.(23),itisobtained:
_S
ðtÞ ¼ _eðtÞ þ ða þ kÞeðtÞ ð31Þ
then, substitutingEq.(20)inEq.(31),
_S
ðtÞ ¼ aeðtÞ þ uðtÞ þ dðtÞ þ ða þ kÞeðtÞ
¼ keðtÞ þ dðtÞ þ uðtÞ ð32Þ
FromEq.(32)wecanconcludethat _S
ðtÞ is boundedbecause e(t), u(t) and d(t) are
bounded.
Now,fromEq.(28)itisdeducedthat
€V
ðtÞ ¼ d_S
ðtÞbg
d
dt
jSðtÞj ð33Þ
which isaboundedquantitybecause _S
ðtÞ is bounded.
Undertheseconditions,since €V
is bounded, _V
is auniformlycontinuousfunction,so
Barbalat’slemmaletusconcludethat _V
-0 as t-1, whichimpliesthat SðtÞ-0 as t-1.
Therefore S(t) tendstozeroasthetime t tendstoinfinity.Moreover,alltrajectories
startingofftheslidingsurface S=0 mustreachitasymptoticallyandthenwillremainonthis
surface.Thissystem’sbehavior,onceontheslidingsurfaceisusuallycalled slidingmode [20].
Whentheslidingmodeoccursontheslidingsurface(24),then SðtÞ ¼ _S
ðtÞ ¼ 0, and
therefore thedynamicbehaviorofthetrackingproblem(20)isequivalentlygovernedby
the followingequation:
_S
ðtÞ ¼ 0 ) _eðtÞ ¼ ða þ kÞeðtÞ ð34Þ
Then, underassumption ðA1Þ, thetrackingerror e(t) convergestozeroexponentially.
It shouldbenotedthat,atypicalmotionundersliding-modecontrolconsistsofa reaching
phase duringwhichtrajectoriesstartingofftheslidingsurface S=0 movetowardsitand
reachit,followedbya slidingphase duringwhichthemotionisconfinedtothissurfaceand
wherethesystemtrackingerror,representedbythereduced-ordermodel(34),tendstozero.
Finally,thetorquecurrentcommand, iqs
en(t), canbeobtaineddirectlysubstitutingEq.(25)
in Eq.(21):
ie
qs ðtÞ ¼
1
b
½ke^ bgsgnðSÞ þ aw
m þ w_
m þ f ð35Þ
Therefore,theproposedvariablestructurespeedcontrolwithadaptiveslidinggain
resolves thespeedtrackingproblemfortheinductionmotor,withuncertaintiesin
mechanicalparametersandloadtorque.
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 308](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-9-2048.jpg)
![estimatorisbasedonstatorvoltageequationsandrotorfluxequationsinthestationary
referenceframe.Itisproposedasavariablestructurecontrolwhichusesanintegralsliding
surfacetorelaxtherequirementoftheaccelerationsignal,thatisusualinconventional
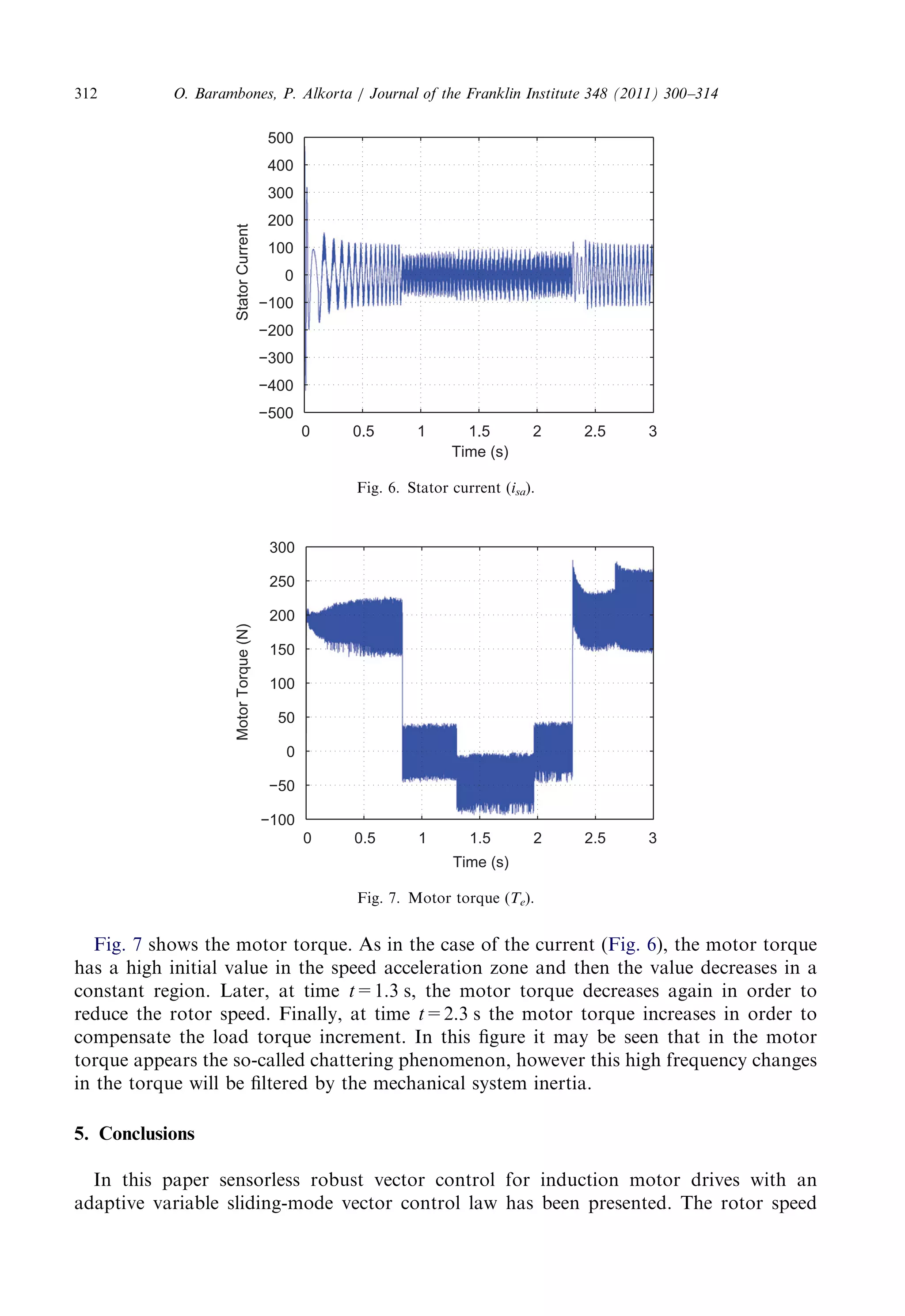
sliding-modespeedcontroltechniques.Duetothenatureoftheslidingcontrolthiscontrol
scheme isrobustunderuncertaintiescausedbyparametererrorsorbychangesintheload
torque. Moreover,theproposedvariablestructurecontrolincorporatesandadaptive
algorithmtocalculatetheslidinggainvalue.Theadaptationoftheslidinggain,ontheone
hand avoidstheneedofcomputingtheupperboundofthesystemuncertainties,andon
the otherhandallowstoemployassmallerslidinggainaspossibletoovercometheactual
system uncertainties.Thenthecontrolsignalofourproposedvariablestructurecontrol
schemes willbesmallerthanthecontrolsignalsofthetraditionalvariablestructurecontrol
schemes,becauseinthesetraditionalschemestheslidinggainvalueshouldbechosenhigh
enoughtoovercomeallthepossibleuncertaintiesthatcouldappearinthesystemalong
the time.
The closedloopstabilityofthedesignpresentedinthispaperhasbeenprovedthought
Lyapunovstabilitytheory.Finally,bymeansofsimulationexamples,ithasbeenshown
that theproposedcontrolschemeperformsreasonablywellinpractice,andthatthespeed
trackingobjectiveisachievedunderuncertaintiesintheparametersandloadtorque.
Acknowledgments
The authorsareverygratefultotheBasqueGovernmentbythesupportofthiswork
through theprojectS-PE09UN12andtotheUPV/EHUbyitssupportthroughproject
GUI07/08.
References
[1] W.Leonhard,ControlofElectricalDrives,Springer,Berlin,1996.
[2] P.Vas,VectorControlofACMachines,OxfordSciencePublications,Oxford,1994.
[3] B.K.Bose,ModernPowerElectronicsandACDrives,PrenticeHall,NewJersey,2001.
[4] R.Beguenane,M.A.Ouhrouche,A.M.Trzynadlowski,Anewschemeforsensorlessinductionmotorcontrol
drives operatinginlowspeedregion,MathematicsandComputersinSimulation71(2006)109–120.
[5] S.Sunter,Slipenergyrecoveryofarotor-sidefieldorientedcontrolledwoundrotorinductionmotorfedby
matrix converter,JournaloftheFranklinInstitute345(2008)419–435.
[6] M.Comanescu,Aninduction-motorspeedestimatorbasedonintegralsliding-modecurrentcontrol,IEEE
Transactions onIndustrialElectronics56(9)(2009)3414–3423.
[7] M.I.Marei,M.F.Shaaban,A.A.El-Sattar,Aspeedestimationunitforinductionmotorsbasedonadaptive
linear combiner,EnergyConversionandManagement50(2009)1664–1670.
[8] A.Y.Alanis,E.N.Sanchez,A.G.Loukianov,E.A.Hernandez,Discrete-timerecurrenthighorderneural
networks fornonlinearidentification,JournaloftheFranklinInstitute347(2010)1253–1265.
[9] T-J.Ren,T-C.Chen,Robustspeed-controlledinductionmotordrivebasedonrecurrentneuralnetwork,
Electric PowerSystemResearch76(2006)1064–1074.
[10] M.Montanari,S.Peresada,A.Tilli,Aspeed-sensorlessindirectfield-orientedcontrolforinductionmotors
based onhighgainspeedestimation,Automatica42(2006)1637–1650.
[11] R.Marino,P.Tomei,C.M.Verrelli,Anadaptivetrackingcontrolfromcurrentmeasurementsforinduction
motors withuncertainloadtorqueandrotorresistance,Automatica44(2008)2593–2599.
[12] J.B.Oliveira,A.D.Araujo,S.M.Dias,Controllingthespeedofathree-phaseinductionmotorusinga
simplified indirectadaptiveslidingmodescheme,ControlEngineeringPractice18(2010)577–584.
[13] M.A.Fnaiech,F.Betin,G.A.Capolino,F.Fnaiech,Fuzzylogicandsliding-modecontrolsappliedtosix-
phase inductionmachinewithopenphases,IEEETransactionsonIndustrialElectronics57(1)(2010)
354–364.
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 313](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-14-2048.jpg)
![[14] M.Montazeri-Gh,A.Poursamad,B.Ghalichi,Applicationofgeneticalgorithmforoptimizationofcontrol
strategy inparallelhybridelectricvehicles,JournaloftheFranklinInstitute343(2006)420–435.
[15] A.Benchaib,C.Edwards,Nonlinearslidingmodecontrolofaninductionmotor,InternationalJournalof
Adaptive ControlandSignalProcesing14(2000)201–221.
[16] O.Barambones,A.J.Garrido,Asensorlessvariablestructurecontrolofinductionmotordrives,Electric
Power SystemsResearch72(2004)21–32.
[17] R.Yazdanpanah,J.Soltani,G.R.ArabMarkadeh,Nonlineartorqueandstatorfluxcontrollerforinduction
motor drivebasedonadaptiveinput–outputfeedbacklinearizationandslidingmodecontrol,Energy
ConversionandManagement49(2008)541–550.
[18] B.Castillo-Toledo,S.DiGennaro,A.G.Loukianov,J.Rivera,Discretetimeslidingmodecontrolwith
applicationtoinductionmotors,Automatica44(2008)3036–3045.
[19] T.Orowska-Kowalska,M.Kami nski, K.Szabat,Implementationofasliding-modecontrollerwithan
integral functionandfuzzygainvaluefortheelectricaldrivewithanelasticjoint,IEEETransactionson
Industrial Electronics57(4)(2010)1309–1317.
[20] V.I.Utkin,Slidingmodecontroldesignprinciplesandapplicationstoelectricdrives,IEEETransactionson
Industrial Electronics40(1993)26–36.
[21] H.Yang,Y.Xia,P.Shi,Observer-basedslidingmodecontrolforaclassofdiscretesystemsviadelta
operator approach,JournaloftheFranklinInstitute347(2010)1199–1213.
[22] I.Boiko,Frequencydomainprecisionanalysisanddesignofslidingmodeobservers,JournaloftheFranklin
Institute 347(2010)899–909.
[23] T.Furuhashi,S.Sangwongwanich,S.Okuma,Aposition-and-velocitysensorlesscontrolforbrushlessDC
motors usinganadaptiveslidingmodeobserver,IEEETransactionsonIndustrialElectronics39(1992)
89–95.
[24] A.B.Proca,A.Keyhani,J.M.Miller,Sensorlesssliding-modecontrolofinductionmotorsusingoperating
condition dependentmodels,IEEETransactionsonEnergyConversion18(2003)205–212.
[25] G.Bartolini,A.Pisano,E.Punta,E.Usai,Asurveyofapplicationsofsecond-orderslidingmodecontrolto
mechanicalsystems,InternationalJournalofControl76(2003)875–892.
[26] M.Rashed,K.B.Goh,M.W.Dunnigan,P.F.A.MacConnell,A.F.Stronach,B.W.Williams,Sensorless
second-ordersliding-modespeedcontrolofavoltage-fedinduction-motordriveusingnonlinearstate
feedback, IEEProceedingsElectricPowerApplications152(2005)1127–1136.
[27] C.Aurora,A.Ferrara,Aslidingmodeobserverforsensorlessinductionmotorspeedregulation,
InternationalJournalofSystemsScience38(2007)913–929.
[28] Y.Xia,Z.Zhu,C.Li,H.Yang,Q.Zhu,Robustadaptiveslidingmodecontrolforuncertaindiscrete-time
systems withtimedelay,JournaloftheFranklinInstitute347(1)(2010)339–357.
[29] M.C.Pai,Designofadaptiveslidingmodecontrollerforrobusttrackingandmodelfollowing,Journalofthe
Franklin Institute347(2010)1838–1849.
[30] J.J.E.Slotine,W.Li,AppliedNonlinearControl,Prentice-Hall,EnglewoodCliffs,NJ,USA,1991.
O. Barambones,P.Alkorta/JournaloftheFranklinInstitute348(2011)300–314 314](https://image.slidesharecdn.com/arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw-141202041539-conversion-gate01/75/A-robust-vector-control-for-induction-motor-drives-with-an-adaptive-sliding-mode-control-law-15-2048.jpg)


































































