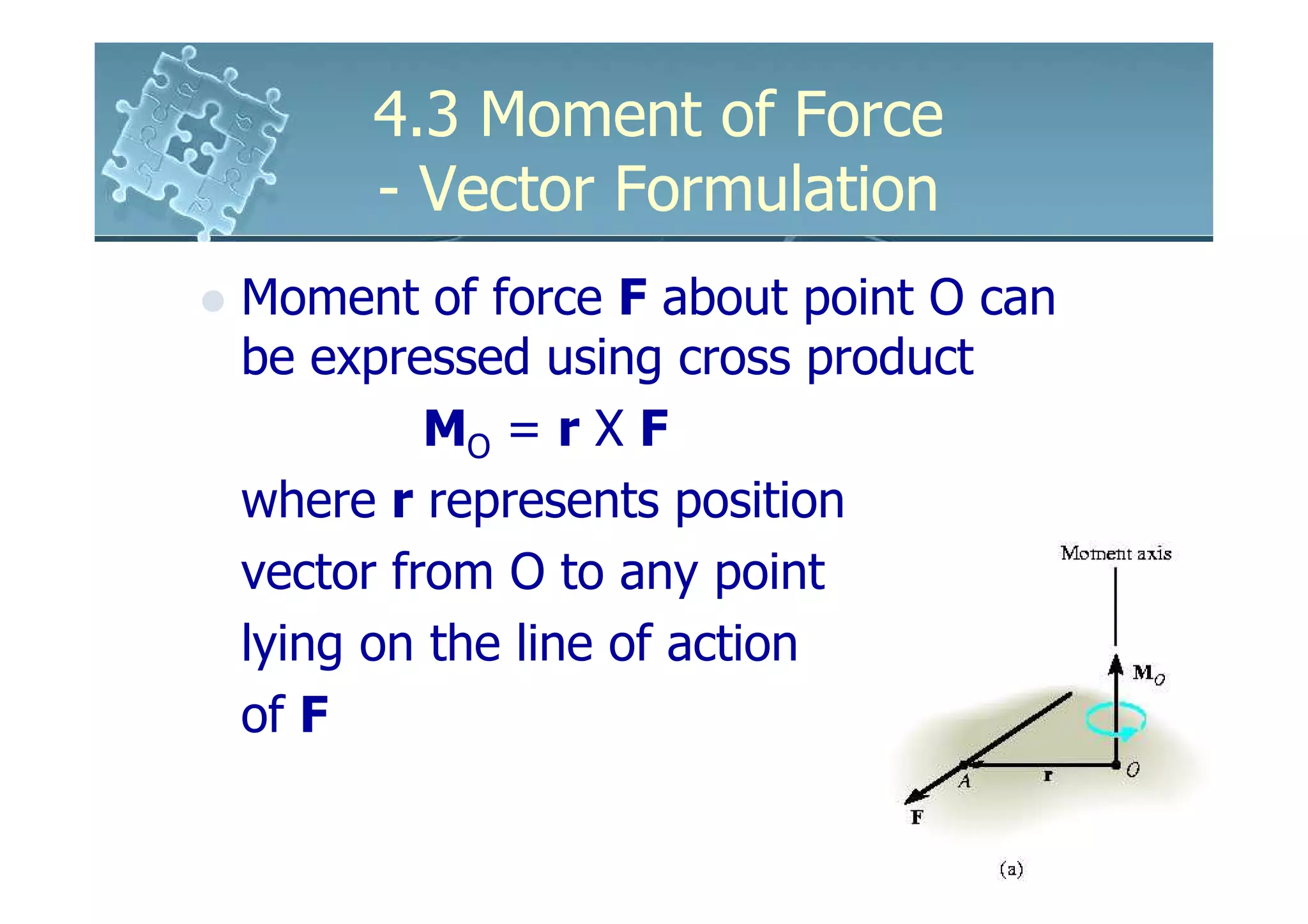
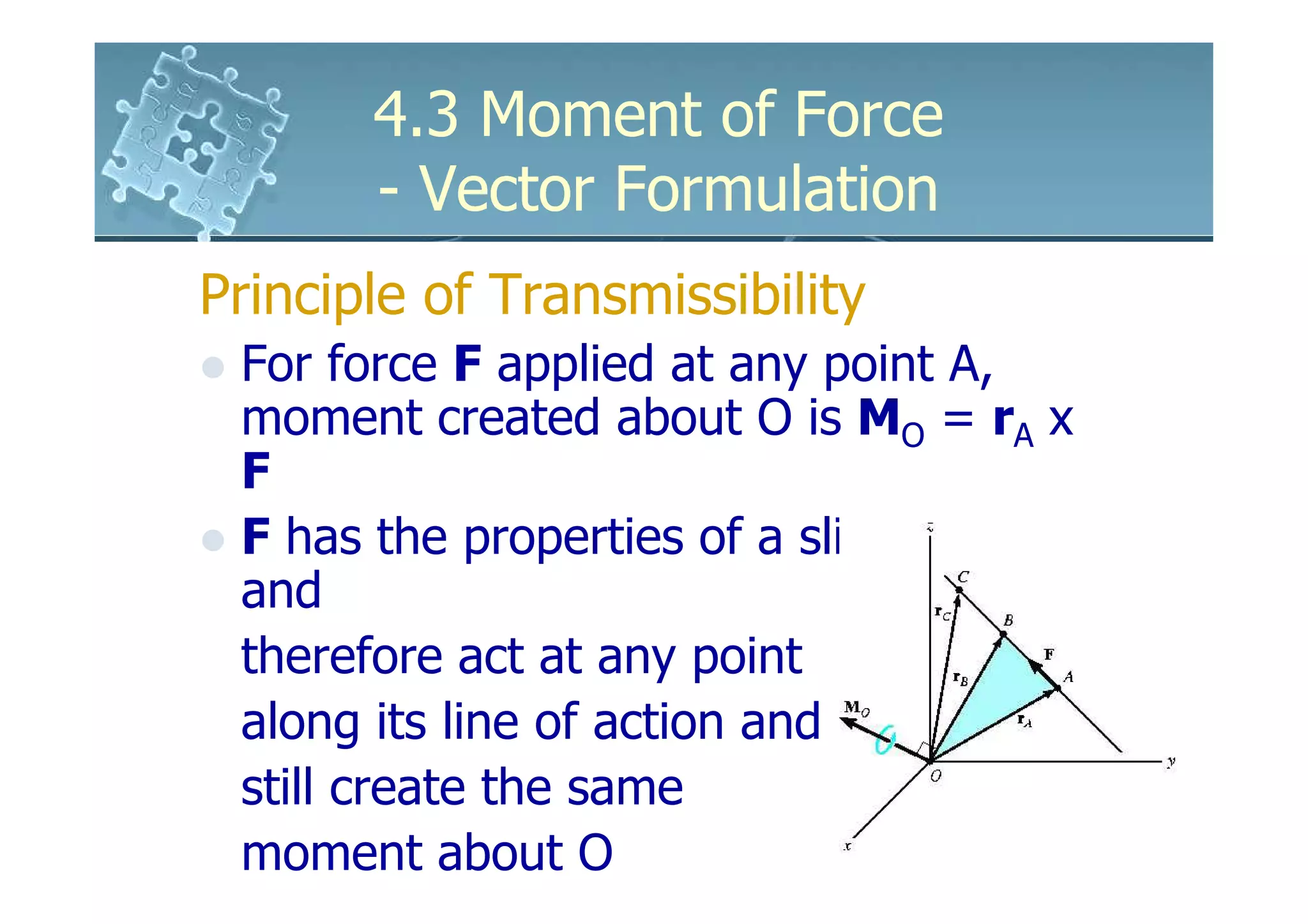
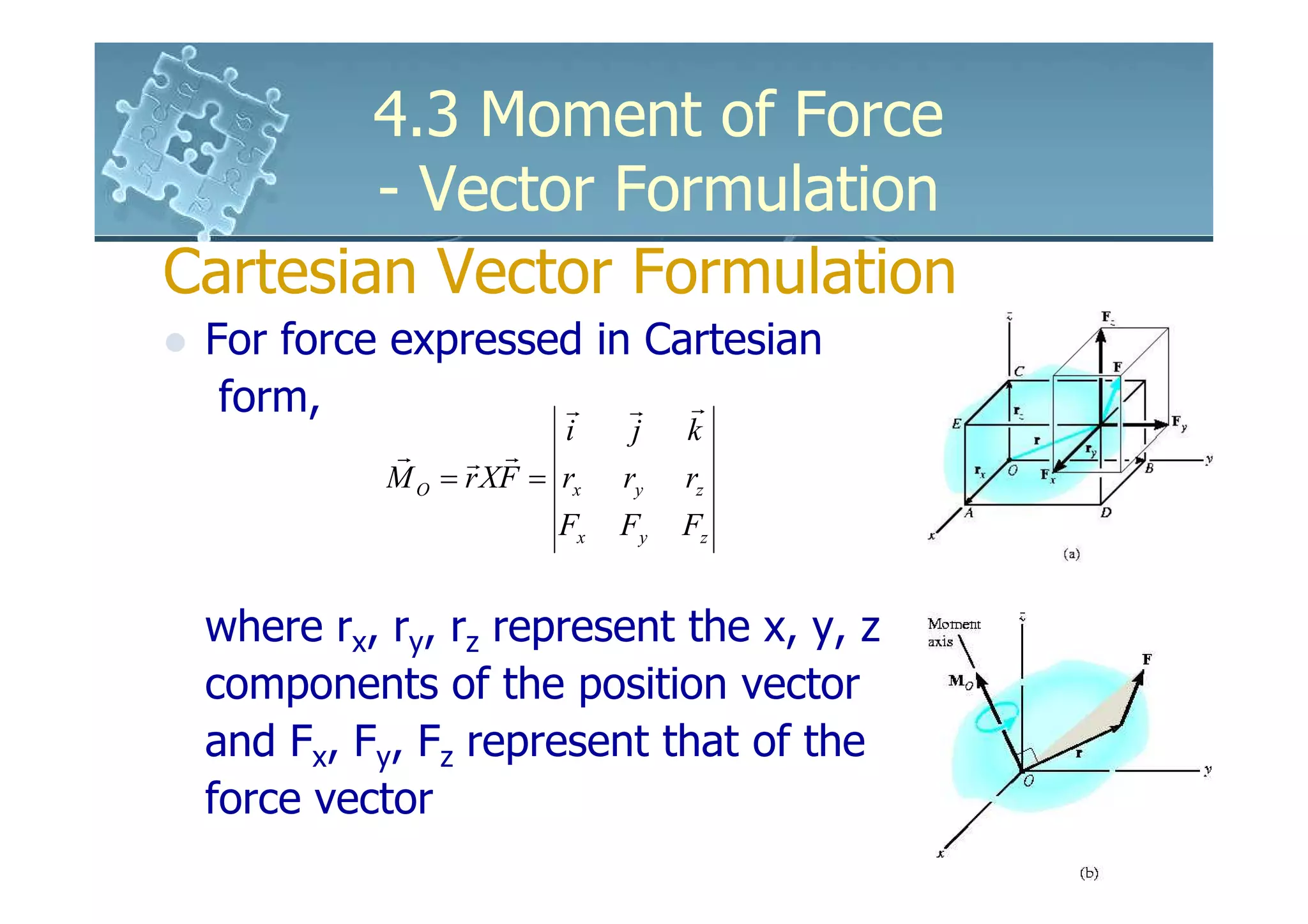
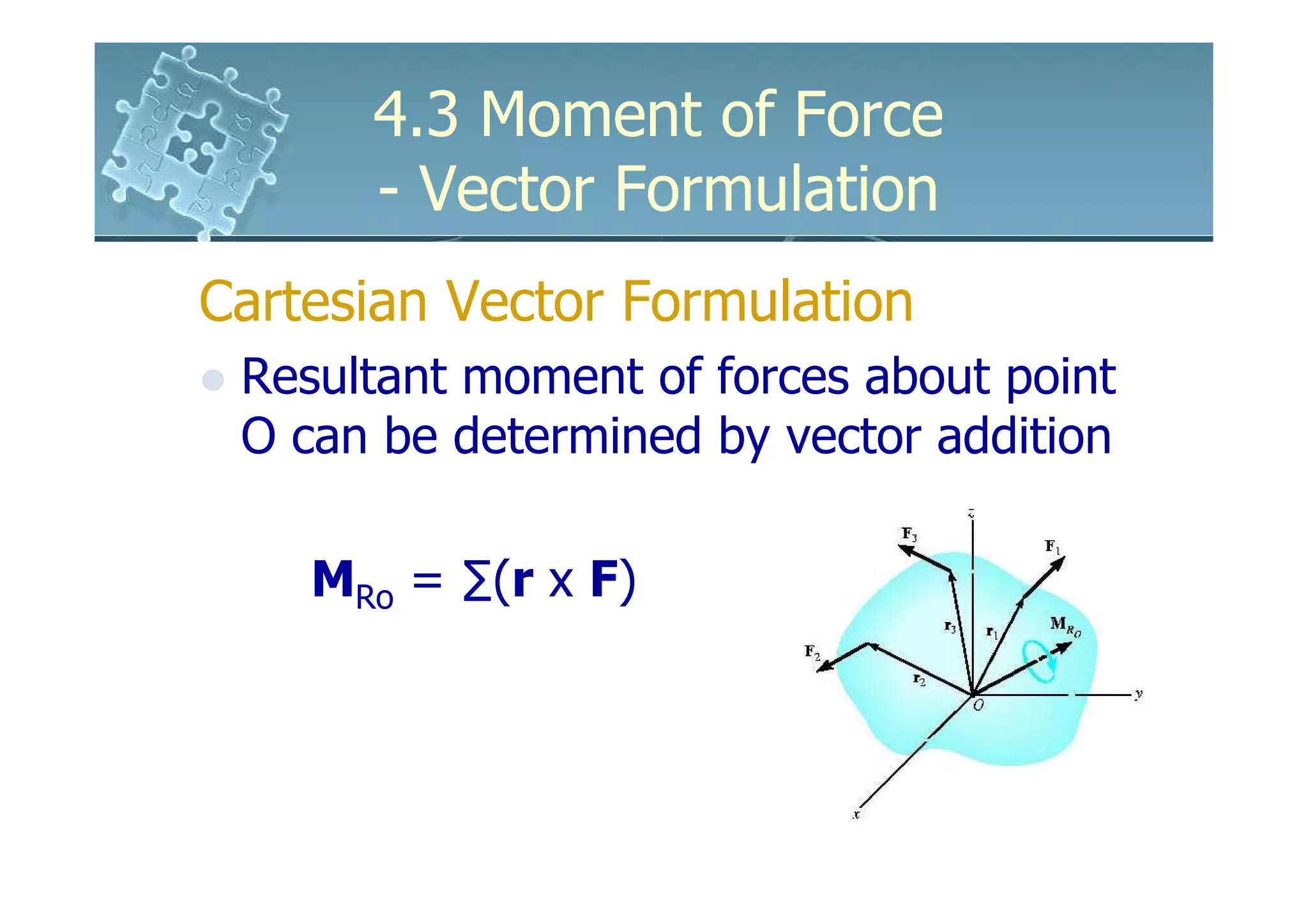
1) Moment of force is calculated using the cross product of the position vector r and force vector F.
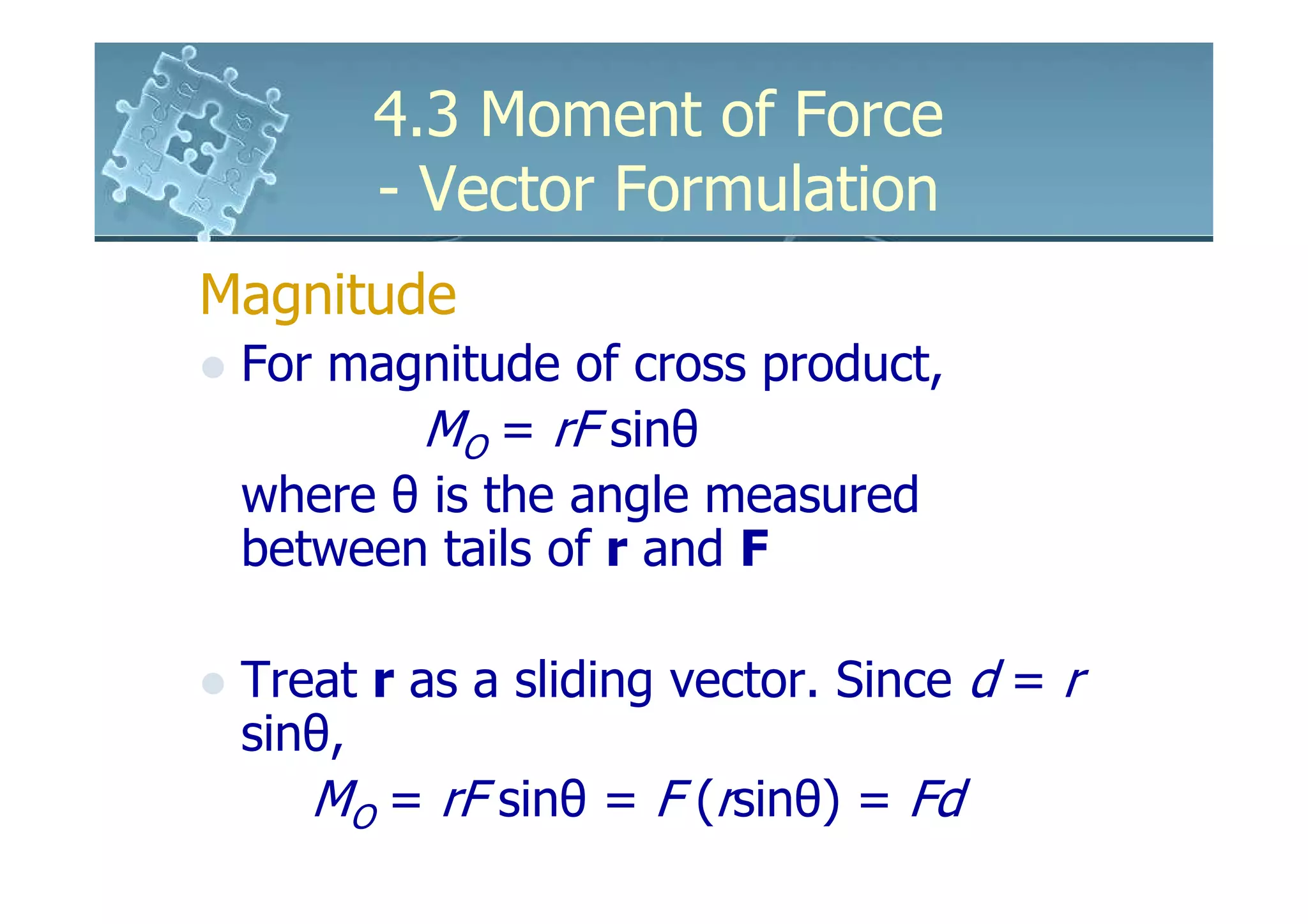
2) The magnitude of the moment is equal to the force F multiplied by the perpendicular distance d between the line of action of F and the point of reference.
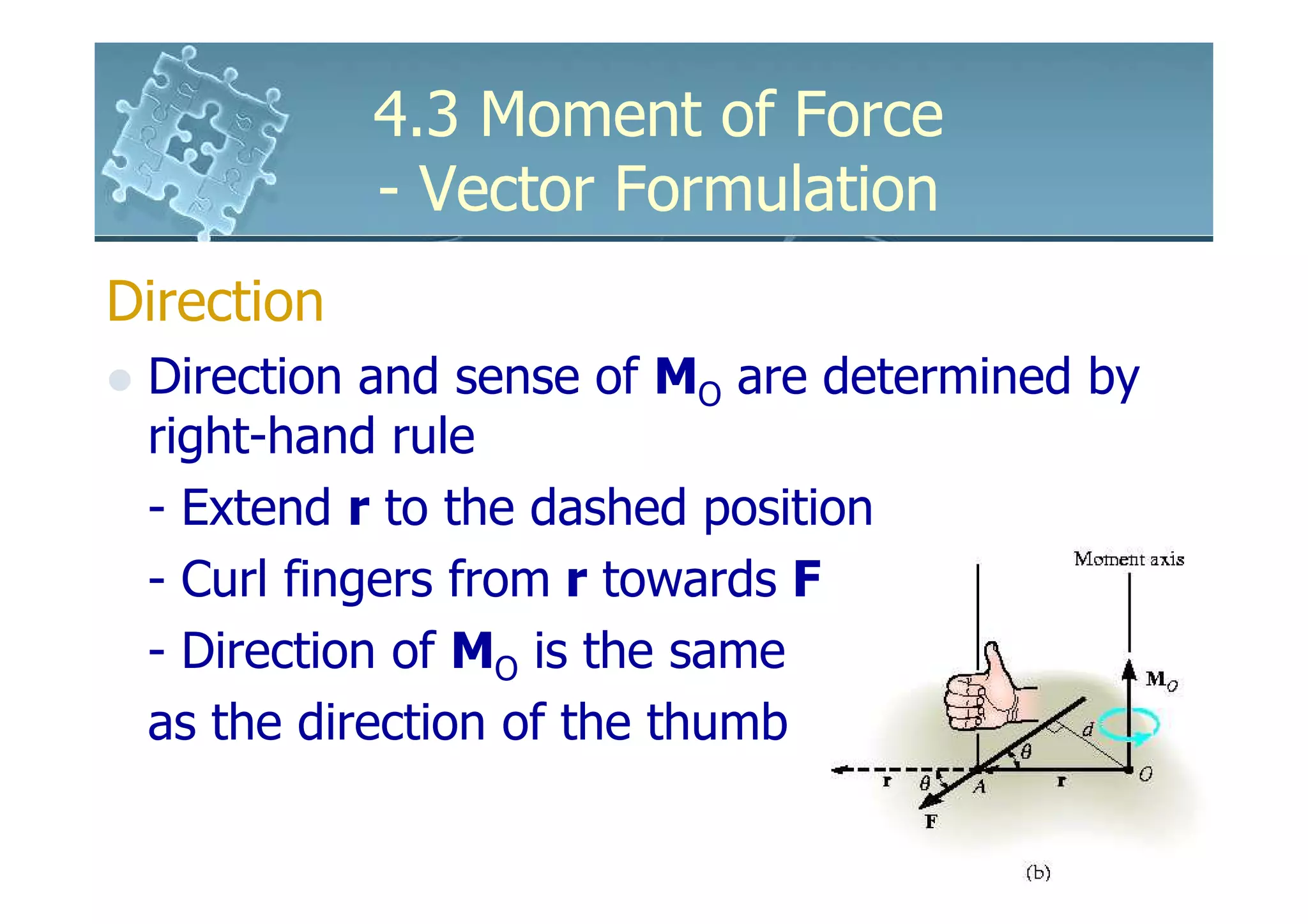
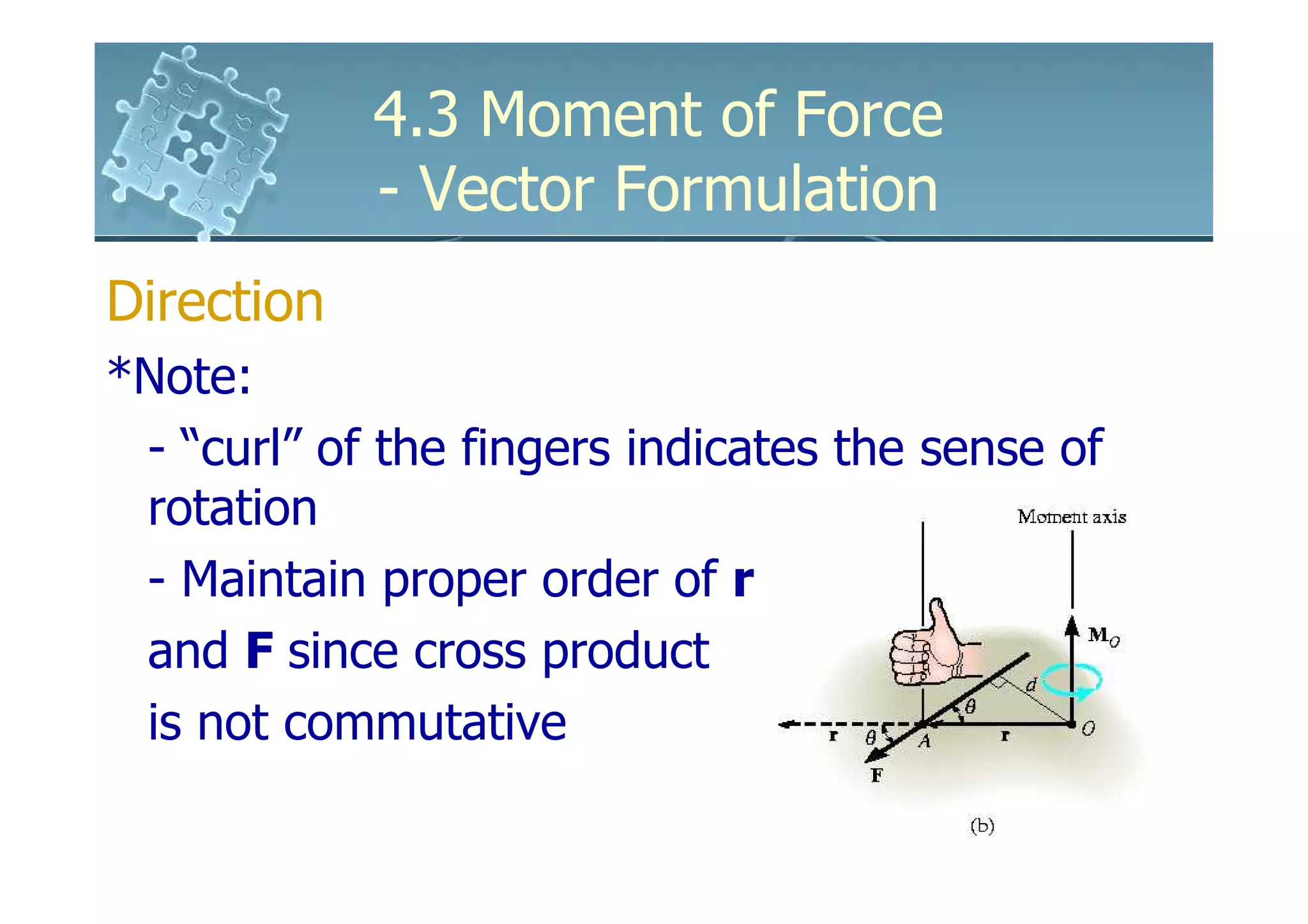
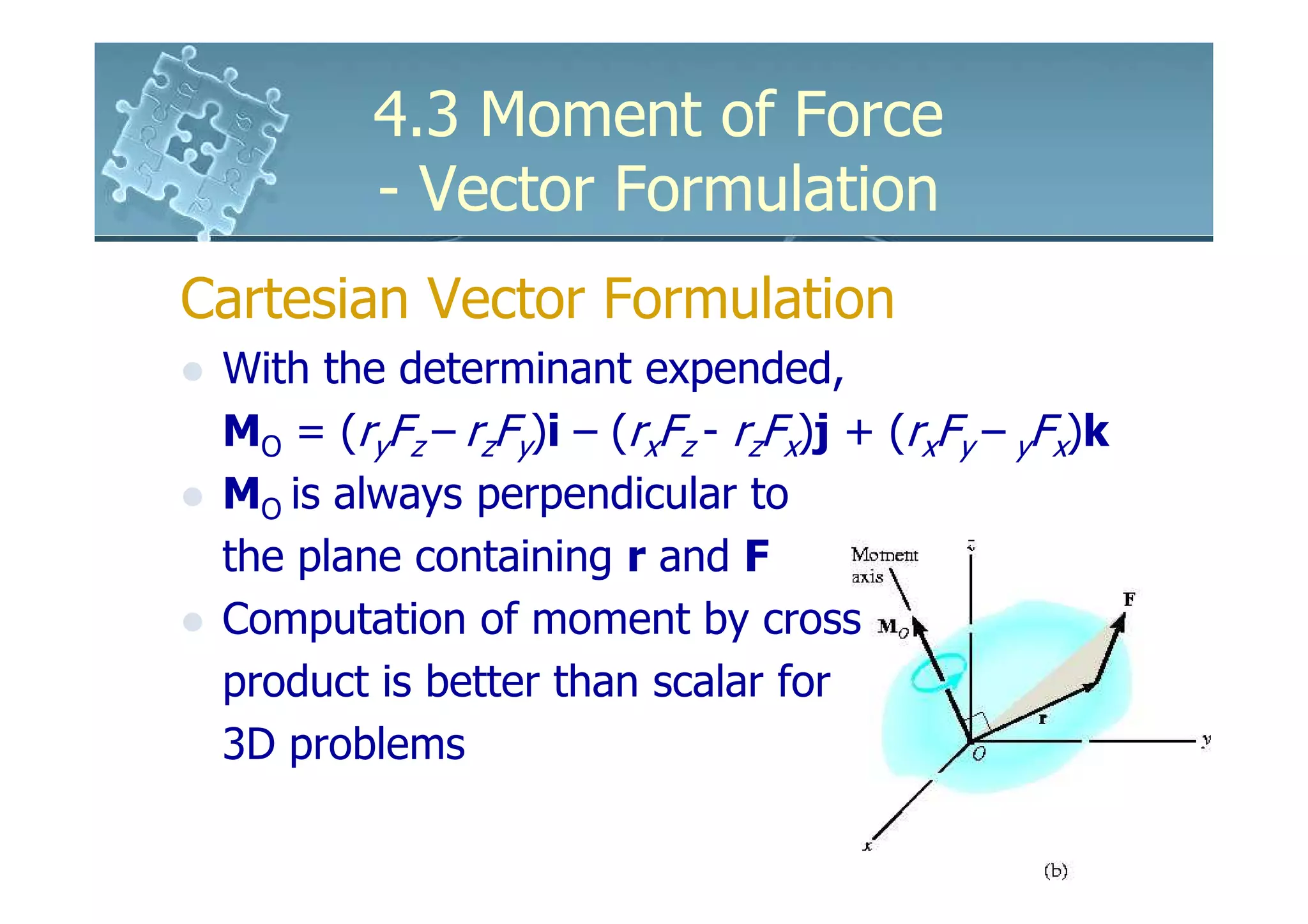
3) The direction of the moment is determined by the right-hand rule applied to r and F.
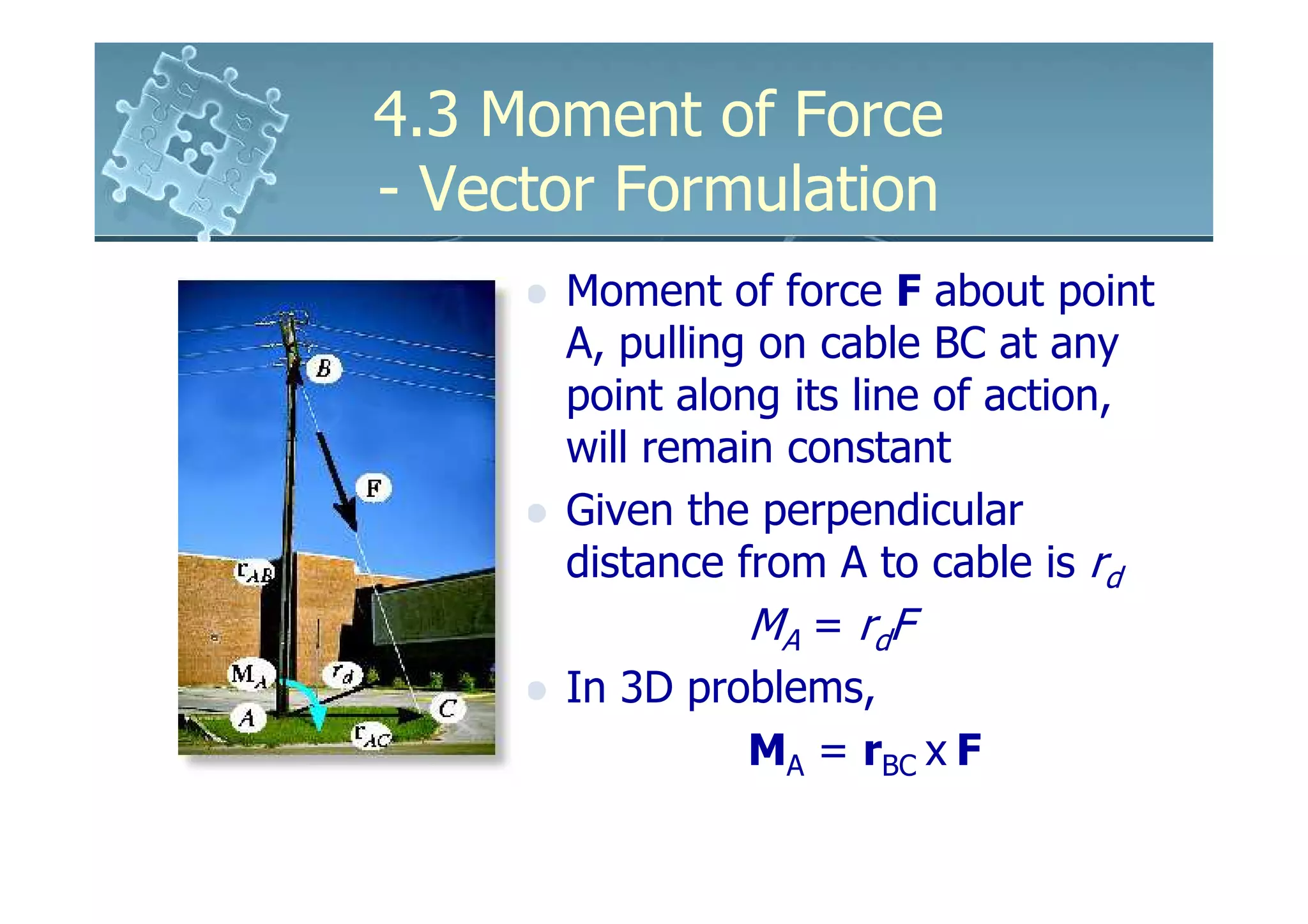
![4.3 Moment of Force
- Vector Formulation
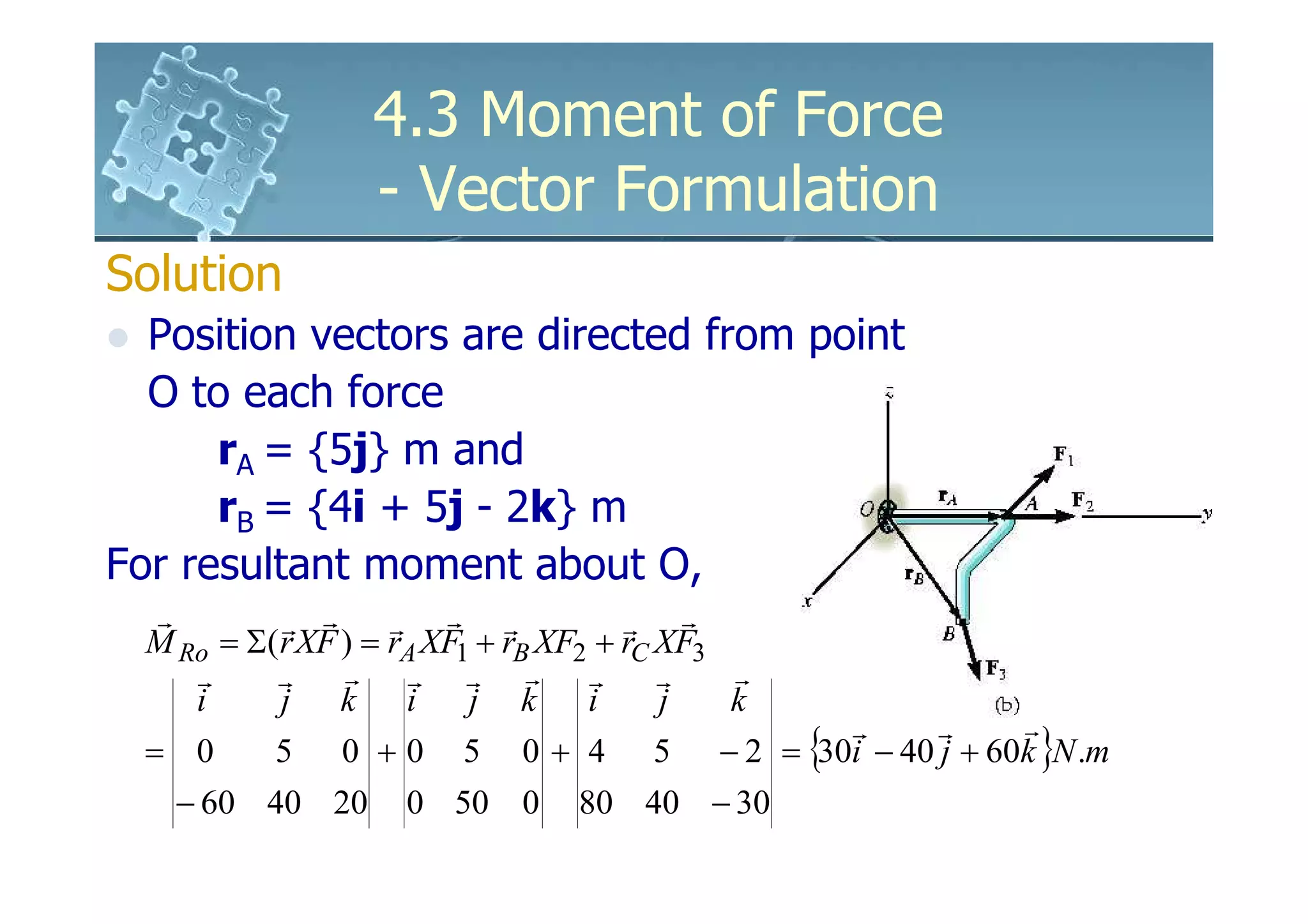
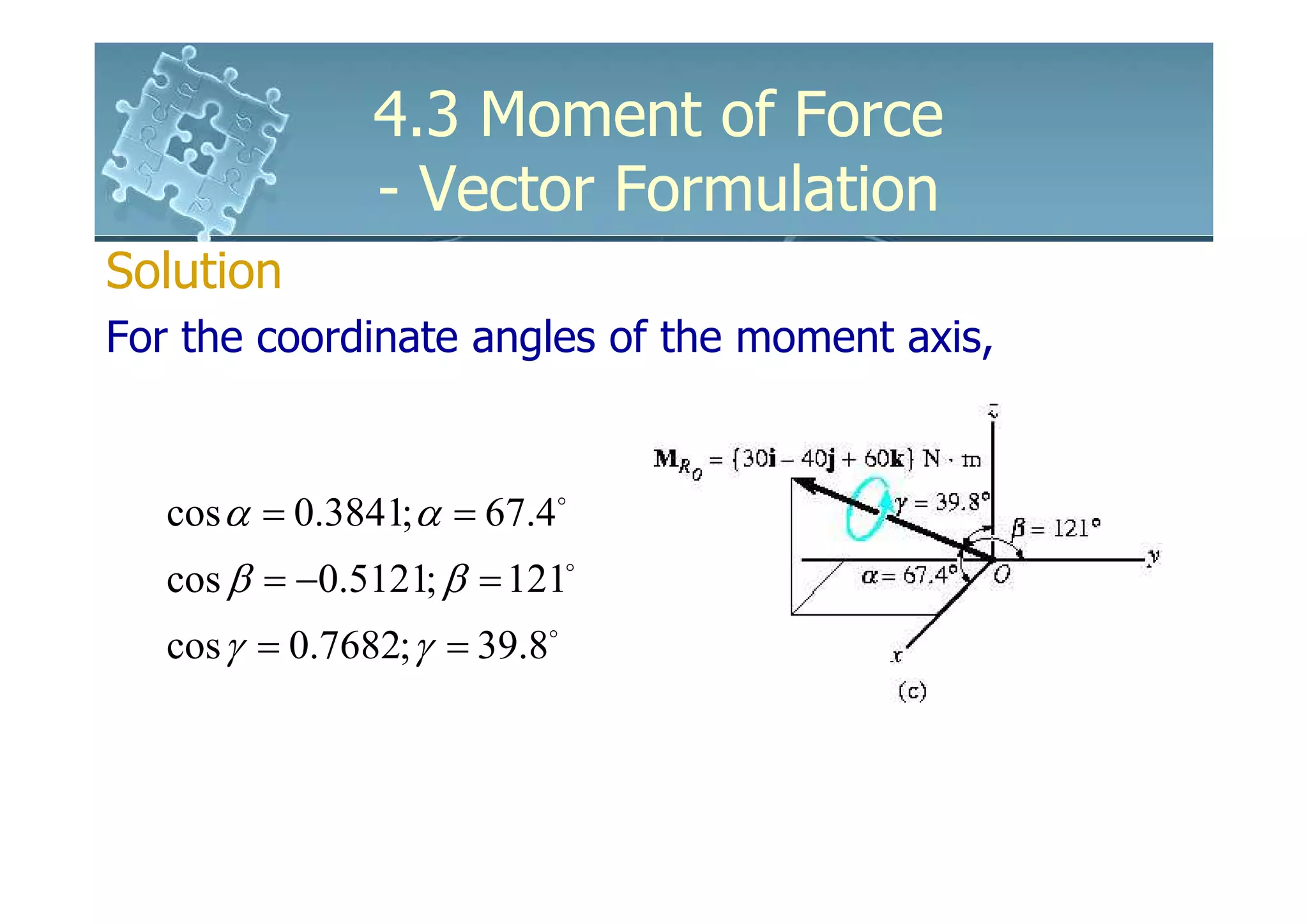
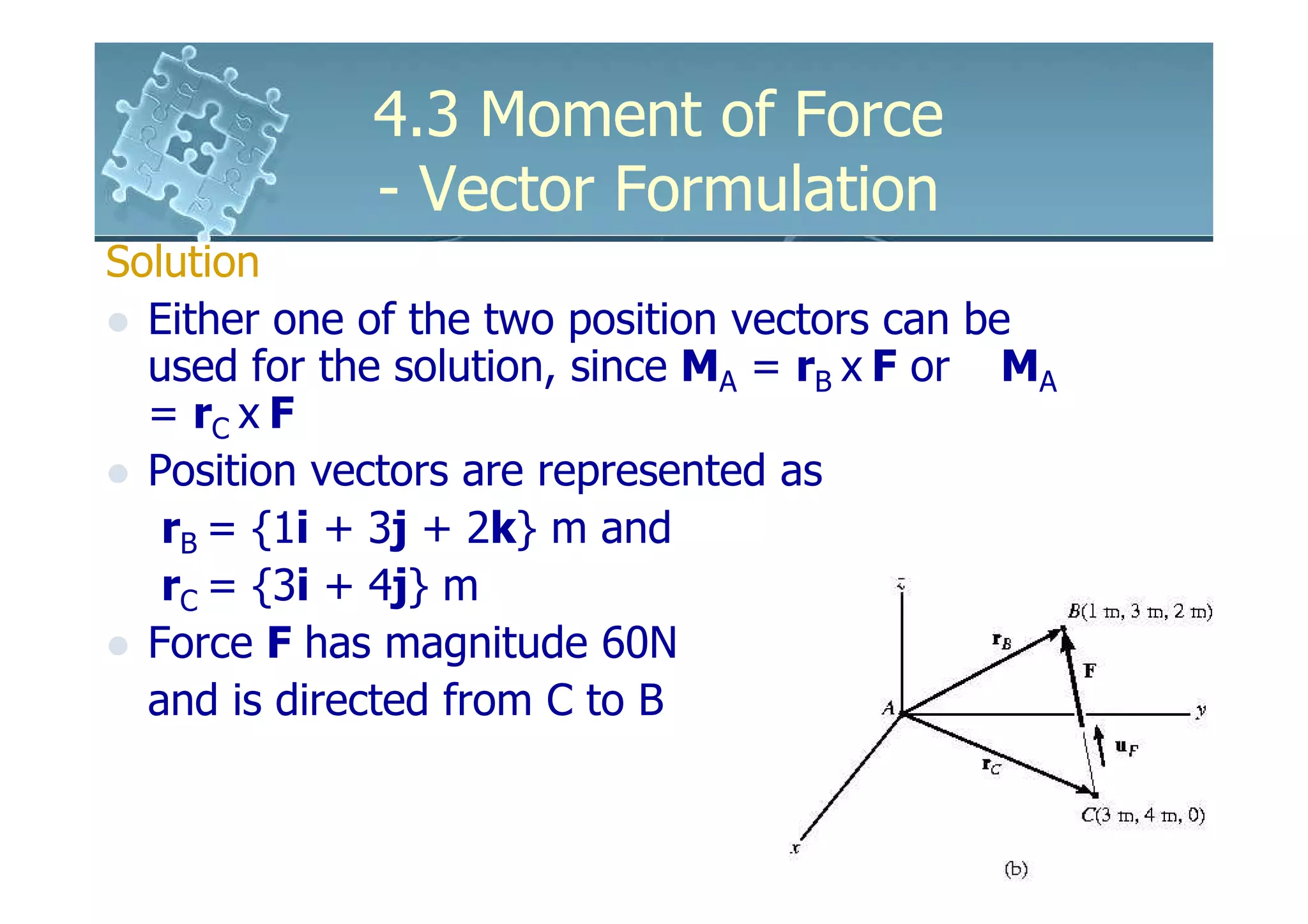
Solution
r r
F = (60 N )u F
r
(1 − 3)i + 93 − 4) r + 92 − 0) k
r
j
= (60 N )
(−2) + (−1) + ( 2)
2 2 2
{ }
r r r
= − 40i − 20 j + 40k N
Substitute into determinant formulation
r r r
i j k
r r r
M A = rB XF = 1 3 2
− 40 − 20 40
{ }
r r r
= [3(40) − 2(−20)]i − [1(40) − 2(−40)] j + [1(−20) − 3( 40)]k](https://image.slidesharecdn.com/61611034-3momentofforce-vectorformulation-120120013954-phpapp01/75/6161103-4-3-moment-of-force-vector-formulation-12-2048.jpg)
![4.3 Moment of Force
- Vector Formulation
Solution r r r
i j k
Or r r r
M A = rC XF = 3 4 0
− 40 − 20 40
{ }
r r r
= [4(40) − 0(−20)]i − [3(40) − 0(−40)] j + [3(−20) − 4(40)]k
Substitute into determinant formulation
{ }
r r r
r
M A = 160i − 120 j + 100k N .m
For magnitude,
r
M A = (160) 2 + (120) 2 + (100) 2
= 224 N .m](https://image.slidesharecdn.com/61611034-3momentofforce-vectorformulation-120120013954-phpapp01/75/6161103-4-3-moment-of-force-vector-formulation-13-2048.jpg)