1. Кинематический и силовой анализ кривошипно-ползунных механизмов
Учебное пособие
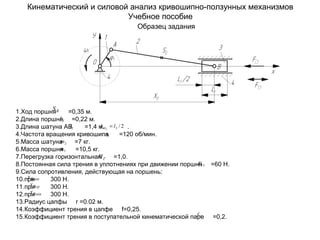
Образец задания
S
1.Ход поршняВ
=0,35 м.
lП
2.Длина поршня =0,22 м.
l AS
l
3.Длина шатуна АВ2
=1,4 м. = l 2 / 2 .
n
4.Частота вращения кривошипа1
=120 об/мин.
m
5.Масса шатуна 2 =7 кг.
m
6.Масса поршня 3
=10,5 кг.
П
7.Перегрузка горизонтальная Г =1,0.
FТ
8.Постоянная сила трения в уплотнениях при движении поршня 3
9.Сила сопротивления, действующая на поршень:
х Вмах
10.при
300 Н.
х Вср
11.при
300 Н.
х Вмin 300 Н.
12.при
13.Радиус цапфы r =0.02 м.
14.Коэффициент трения в цапфе f=0,25.
fП
15.Коэффициент трения в поступательной кинематической паре
2
=60 Н.
=0,2.
3. Схема механизма в восьми положениях
хF = −1, признак сборки механизма
l1 = lОА ; l2 = l АВ ,
l1 = S В / 2;
х Вмах = l1 + l2 ;
х Вмin = l2 − l1 ;
х Вср = х В min + l1 = l2
4. Аналитический метод кинематического анализа механизма
πn
ϕ1 , l1 , l 2 , ω1 =
= const.
Известные
30
Определить: ϕ 2 , ω2 , ε 2 , x B , υ B , a B , x S 2 , y S 2 , υ S 2 , a S 2 - в функции положения ведущего звена ϕ1
lOB + lBA = lOA ; ( 2.1)
xB + l2 cos ϕ2 = l1 cos ϕ1,
( 2.2 )
l2 sin ϕ2 = l1 sin ϕ1
ϕ2 = ϕ′2 при xF = +1,
ϕ2 = ϕ′2 + π при xF = −1; где
l
ϕ′2 = arcsin 1 sin ϕ1 .
l
2
lOS 2 + lS2 A = lOA ; ( 2.12 )
xS 2 + lS2 A sin ϕ2 = l1 sin ϕ1,
( 2.13)
yS2 + lS 2 A sin ϕ2 = l1 sin ϕ1
5. Графоаналитический метод определения кинематических параметров
Построение плана скоростей
υ B = υ Be + υ Br ;
υ Be = υ A ; υ A = ω1l1;
υ Br = υ BA ; υ BA = ω2l2 ;
υ B = υ A + υ BA ; ( 2.27 )
// x ⊥ OA ⊥ BA
Kυ = υA
;
Z υA
υ B = Z υB K υ ;
υ BA = Z υBA ⋅ K υ ; ω2 = υ BA ;
l2
υ B > 0; ω2 < 0.
υS 2 = υ A + υS2 A
⊥ OA ⊥ AS 2 ( 2.30 )
;
aS 2 = ab AS 2
AB
υ S 2 = Z υS 2 K υ .
6. Графоаналитический метод определения кинематических параметров
Построение плана ускорений
a B = a B + a Br ;
2
a B = a A = a n + a tA ; a n = l1ω1 ; a tA = l1ε1 = 0;
A
A
n
a Br = a BA = a BA + a T ;
BA
n
t
a BA = l 2 ω2 ; a BA = l 2 ε 2 ;
2
n
t
a B = a n + a BA + a BA ; ( 2.36 )
A
// x // OA // BA ⊥ BA
an
Ka = A
Za n
A
;
n
Z a BA
n
a BA
=
Ka
t
t
t
a BA = Z a BA K a , ε 2 = a BA
l2
;
; aB = ZaB K a
ε 2 < 0; a B < 0.
a S 2 = a n + a S 2 A ; ( 2.40 )
A
// OA // a BA
; aS = ab AS 2
;
a S 2 A = a BA AS 2
2
AB
AB
a S 2 = Z aS 2 K a
7. Графоаналитический метод силового анализа механизма
Схемы к кинематическому расчёту двухповодковой группы, ведущего звена и план сил
Известны: кинематические параметры; нагрузка
на звеньях механизма.
Определить: силы в кинематических парах Fij ;
уравновешивающий момент М у .
8. Алгоритм проведения силового анализа механизма
1) ∑ М В = 0; ( 3.7 )
2
G2 hG 2 + Fu 2hu 2 − FПГ 2hГ 2 + FМu 2 AB +
t
t
+ F21 AB = 0 → F21, здесь FМu 2 = Мu 2 .
l2
2) ∑ F = 0; ( 3.9 )
2, 3
F34 + ( FC 3 + FT 3 ) + FПГ 3 + Fu 3 + G3 + G2 +
⊥x
t
u
+ FПГ 2 + Fu 2 + F21 + F21 = 0.
// ВА
K F = ( FC 3 + FT 3 ) / z ( FC 3 + FT 3 ) ; Z G 2 = G2
KF
и т.д.
u
u
F34 = Z F 34 K F ; F21 = Z F21 K F .
3) ∑ М В = 0 → h34 = 0. ( 3.12)
3
4) ∑ F = 0; ( 3.13)
3
F 34 + ( FC 3 + FT 3 ) + FПГ 3 + Fu 3 + G3 + F32 = 0
F32 = Z F 32 K F ; F23 = − F32 .
t
n
5) F14 = − F12 = F21 = F21 + F21.
6) ∑ M 0 = 0; M y = F12l1 cos φ1; M y > 0. ( 3.15)
1
9. Определение уравновешивающего момента методом возможных
перемещений
∧
Fi d Si cos Fi ; d Si + ∑ M i dϕi = 0. ( 3.17 )
∑
d Si
dϕi
= υi ;
= ωi ;
dt
dt
∧
∑ Fi υi cos Fi ; υi + ∑ M i ωi = 0. ( 3.18)
∧
FC 3 + FT 3 υ B cos ( FC 3 + FT 3 ) , υ B +
∧
∧
+ FПГ 3 υ B cos FПГ 3 , υ B + Fu 3 υ B cos Fu 3 , υ B +
∧
∧
+ G3 υ B cos G3 , υ B + FПГ 2 υS 2 cos FПГ 2 , υS 2 +
∧
∧
Fu 2 υS 2 cos Fu 2 , υS 2 + G2 υS 2 cos G2 , υS 2 +
M u 2ω2 + M y ω1 = 0 → M y .
10. Определение уравновешивающего момента с помощью рычага
Жуковского
∑ M p = 0;
( 3.21)
( FC 3 + FT 3 + FПГ 3 − Fu 3 ) pв − Fu 2hu 2 + G2h
FПГ 2hГ 2 + FMu 2 aв + FMy pa = 0 → FMy
My = FMy ⋅ l1.
G2
+
11. Расчёт на ЭВМ
Кинематический анализ и силовой анализ без учёта сил трения в
кинематических парах
Исходные данные
Результаты расчёта
14. Силовой анализ с учетом трения в кинематических парах
(
)
M Tij = − M Tij + r ⋅ f Fij signωij ; ( 4.4)
(
)
FTij = − FTij + f П Fijn signυij .
Звено 3 :
( 4 .5 )
′
FT′ 34 = − f П F34y signυ34 ;
′′
FT′′34 = − f П F34 y signυ34 ;
M T 32 = −rf F32 signω32 .
Звено 2 :
M T 23 = − M T 32 ;
M T 21 = −rf F21 signω21;
M T 2 = M T 23 + M T 21.
Звено 1 :
M T 12 = − M T 21;
M T 14 = − rf F14 signω14 ;
M T 1 = M T 12 + M T 14 ,
где υ34 = υ3 − υ4 = υ В ; ωij = ωi − ω j .
15. Вертикальное расположение механизма
Х D = X B ; У D = 0.
Закон изменения силы сопротивления FC 3 для вертикального расположения механизма
а = 0,1S В max ; в = 0,1FC 3 max
16. Расчёт на ЭВМ с учётом трения в кинематических парах
Исходные данные
Результаты расчёта
17. Силовые характеристики механизма с учётом трения в кинематических парах
Годаграф силы F21
Зависимость уравновешивающего момента от положения кривошипа