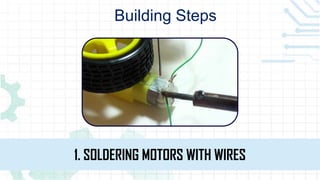
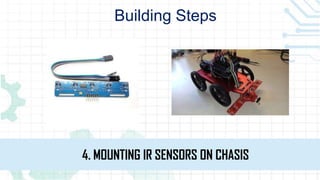
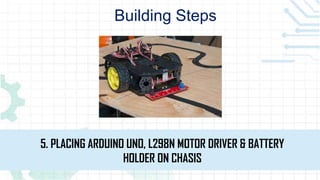
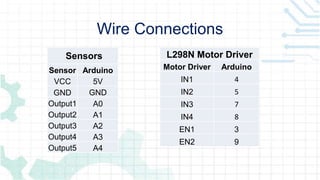
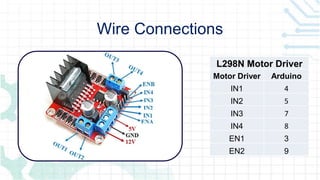
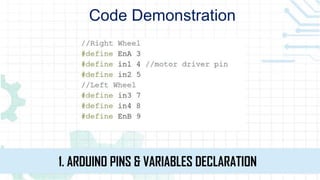
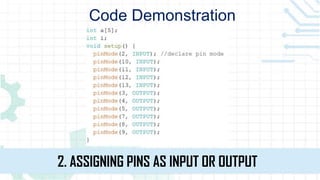
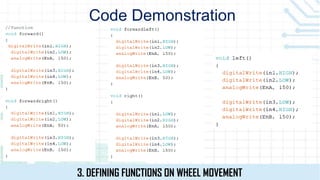
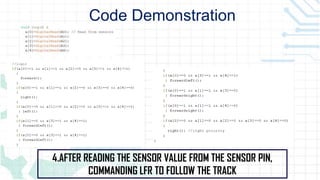
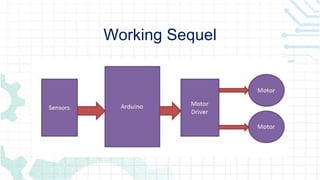
This document provides instructions for building a line following robot. It outlines 5 steps for construction, including soldering motors, attaching wheels and motors to the chassis, mounting IR sensors, and placing the Arduino, motor driver and battery. It also details the wiring connections between components and includes code demonstrations for pin declarations, assigning pins as inputs/outputs, defining wheel movement functions, and using sensor values to command the robot to follow a track. The overall purpose is to introduce how to build a robot that can autonomously detect and follow a predefined line.