Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Recruit Technologies
PDF, PPTX
4,838 views
分析手法のご紹介
2016/02/08 DATA×UX CROSSINGでの、赤塚の講演資料になります
Technology
◦
Read more
12
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 13
2
/ 13
3
/ 13
4
/ 13
5
/ 13
6
/ 13
7
/ 13
8
/ 13
9
/ 13
10
/ 13
11
/ 13
12
/ 13
13
/ 13
More Related Content
PPTX
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
by
Shota Imai
PPTX
強化学習 DQNからPPOまで
by
harmonylab
PDF
大規模な組合せ最適化問題に対する発見的解法
by
Shunji Umetani
PDF
SIX ABEJA 講演資料 もうブラックボックスとは呼ばせない~機械学習を支援する情報
by
Takayuki Itoh
PDF
SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法
by
SSII
PDF
「リクルートデータセット」 ~公開までの道のりとこれから~
by
Recruit Technologies
PDF
One Class SVMを用いた異常値検知
by
Yuto Mori
PDF
[DL輪読会]Ensemble Distribution Distillation
by
Deep Learning JP
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
by
Shota Imai
強化学習 DQNからPPOまで
by
harmonylab
大規模な組合せ最適化問題に対する発見的解法
by
Shunji Umetani
SIX ABEJA 講演資料 もうブラックボックスとは呼ばせない~機械学習を支援する情報
by
Takayuki Itoh
SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法
by
SSII
「リクルートデータセット」 ~公開までの道のりとこれから~
by
Recruit Technologies
One Class SVMを用いた異常値検知
by
Yuto Mori
[DL輪読会]Ensemble Distribution Distillation
by
Deep Learning JP
What's hot
PDF
BlackBox モデルの説明性・解釈性技術の実装
by
Deep Learning Lab(ディープラーニング・ラボ)
PDF
機械学習モデルの判断根拠の説明
by
Satoshi Hara
PDF
Teslaにおけるコンピュータビジョン技術の調査 (2)
by
Kazuyuki Miyazawa
PDF
情報推薦システム入門:講義スライド
by
Kenta Oku
PDF
協調フィルタリングを利用した推薦システム構築
by
Masayuki Ota
PDF
プロトタイプで終わらせない死の谷を超える機械学習プロジェクトの進め方 #MLCT4
by
shakezo
PDF
Transformer メタサーベイ
by
cvpaper. challenge
PDF
CVPR2018のPointCloudのCNN論文とSPLATNet
by
Takuya Minagawa
PDF
5 クラスタリングと異常検出
by
Seiichi Uchida
PDF
多様な強化学習の概念と課題認識
by
佑 甲野
PDF
20190619 オートエンコーダーと異常検知入門
by
Kazuki Motohashi
PDF
Data-Centric AIの紹介
by
Kazuyuki Miyazawa
PDF
機械学習モデルの判断根拠の説明(Ver.2)
by
Satoshi Hara
PPTX
大学生及び大学院生の研究時間とメンタルヘルス
by
Atsuto ONODA
PDF
モデルではなく、データセットを蒸留する
by
Takahiro Kubo
PDF
協調フィルタリング入門
by
hoxo_m
PDF
Gunosyにおけるパーソナライズシステム
by
Shunsuke Kozawa
PPTX
【DL輪読会】SimCSE: Simple Contrastive Learning of Sentence Embeddings (EMNLP 2021)
by
Deep Learning JP
PDF
点群深層学習 Meta-study
by
Naoya Chiba
PDF
テーブル・テキスト・画像の反実仮想説明
by
tmtm otm
BlackBox モデルの説明性・解釈性技術の実装
by
Deep Learning Lab(ディープラーニング・ラボ)
機械学習モデルの判断根拠の説明
by
Satoshi Hara
Teslaにおけるコンピュータビジョン技術の調査 (2)
by
Kazuyuki Miyazawa
情報推薦システム入門:講義スライド
by
Kenta Oku
協調フィルタリングを利用した推薦システム構築
by
Masayuki Ota
プロトタイプで終わらせない死の谷を超える機械学習プロジェクトの進め方 #MLCT4
by
shakezo
Transformer メタサーベイ
by
cvpaper. challenge
CVPR2018のPointCloudのCNN論文とSPLATNet
by
Takuya Minagawa
5 クラスタリングと異常検出
by
Seiichi Uchida
多様な強化学習の概念と課題認識
by
佑 甲野
20190619 オートエンコーダーと異常検知入門
by
Kazuki Motohashi
Data-Centric AIの紹介
by
Kazuyuki Miyazawa
機械学習モデルの判断根拠の説明(Ver.2)
by
Satoshi Hara
大学生及び大学院生の研究時間とメンタルヘルス
by
Atsuto ONODA
モデルではなく、データセットを蒸留する
by
Takahiro Kubo
協調フィルタリング入門
by
hoxo_m
Gunosyにおけるパーソナライズシステム
by
Shunsuke Kozawa
【DL輪読会】SimCSE: Simple Contrastive Learning of Sentence Embeddings (EMNLP 2021)
by
Deep Learning JP
点群深層学習 Meta-study
by
Naoya Chiba
テーブル・テキスト・画像の反実仮想説明
by
tmtm otm
Similar to 分析手法のご紹介
PDF
ビジネス活用事例で学ぶデータサイエンス入門 #6
by
you shimajiro
PDF
BigQueryとTableauによるカスタマージャーニー分析
by
CROSSHACK, Inc.
PDF
20120326 zansa勉強会発表資料 (公開用) 02 04-38
by
tetsuro ito
PDF
マーケティング技術
by
haji mizu
PPTX
Sample deck
by
Yuya Nakata
PDF
セグメント?クラスタリング? ユーザーを分類し、サービスの改善に活かすポイント
by
Naoto Tamiya
PDF
サービス改善はログデータ分析から
by
Kenta Suzuki
PDF
POStudy塾 ~プロダクトオーナーシップをテーマにさまざまな技法の習熟度をさらに上げたい方のための実践塾~ 【2015/12/22(火)】
by
満徳 関
PDF
POStudy塾 ~プロダクトオーナーシップをテーマにさまざまな技法の習熟度をさらに上げたい方のための実践塾~ 【2015/12/07(月)】
by
満徳 関
PDF
POStudy塾 ~プロダクトオーナーシップをテーマにさまざまな技法の習熟度をさらに上げたい方のための実践塾~ 【2015/11/26(木)】
by
満徳 関
ビジネス活用事例で学ぶデータサイエンス入門 #6
by
you shimajiro
BigQueryとTableauによるカスタマージャーニー分析
by
CROSSHACK, Inc.
20120326 zansa勉強会発表資料 (公開用) 02 04-38
by
tetsuro ito
マーケティング技術
by
haji mizu
Sample deck
by
Yuya Nakata
セグメント?クラスタリング? ユーザーを分類し、サービスの改善に活かすポイント
by
Naoto Tamiya
サービス改善はログデータ分析から
by
Kenta Suzuki
POStudy塾 ~プロダクトオーナーシップをテーマにさまざまな技法の習熟度をさらに上げたい方のための実践塾~ 【2015/12/22(火)】
by
満徳 関
POStudy塾 ~プロダクトオーナーシップをテーマにさまざまな技法の習熟度をさらに上げたい方のための実践塾~ 【2015/12/07(月)】
by
満徳 関
POStudy塾 ~プロダクトオーナーシップをテーマにさまざまな技法の習熟度をさらに上げたい方のための実践塾~ 【2015/11/26(木)】
by
満徳 関
More from Recruit Technologies
PDF
新卒2年目が鍛えられたコードレビュー道場
by
Recruit Technologies
PDF
カーセンサーで深層学習を使ってUX改善を行った事例とそこからの学び
by
Recruit Technologies
PDF
Rancherを活用した開発事例の紹介 ~Rancherのメリットと辛いところ~
by
Recruit Technologies
PDF
Tableau活用4年の軌跡
by
Recruit Technologies
PDF
HadoopをBQにマイグレしようとしてる話
by
Recruit Technologies
PDF
LT(自由)
by
Recruit Technologies
PDF
リクルートグループの現場事例から見る AI/ディープラーニング ビジネス活用の勘所
by
Recruit Technologies
PDF
Company Recommendation for New Graduates via Implicit Feedback Multiple Matri...
by
Recruit Technologies
PDF
リクルート式AIの活用法
by
Recruit Technologies
PDF
銀行ロビーアシスタント
by
Recruit Technologies
PDF
リクルートにおけるマルチモーダル Deep Learning Web API 開発事例
by
Recruit Technologies
PDF
ユーザー企業内製CSIRTにおける対応のポイント
by
Recruit Technologies
PDF
ユーザーからみたre:Inventのこれまでと今後
by
Recruit Technologies
PDF
Struggling with BIGDATA -リクルートおけるデータサイエンス/エンジニアリング-
by
Recruit Technologies
PDF
EMRでスポットインスタンスの自動入札ツールを作成する
by
Recruit Technologies
PDF
RANCHERを使ったDev(Ops)
by
Recruit Technologies
PDF
リクルートにおけるセキュリティ施策方針とCSIRT組織運営のポイント
by
Recruit Technologies
PDF
ユーザー企業内製CSIRTにおける対応のポイント
by
Recruit Technologies
PDF
リクルートテクノロジーズが語る 企業における、「AI/ディープラーニング」活用のリアル
by
Recruit Technologies
PDF
運用で泣かないアーキテクチャで動く原稿作成支援システム ~リクルートにおけるDeepLearning活用事例~
by
Recruit Technologies
新卒2年目が鍛えられたコードレビュー道場
by
Recruit Technologies
カーセンサーで深層学習を使ってUX改善を行った事例とそこからの学び
by
Recruit Technologies
Rancherを活用した開発事例の紹介 ~Rancherのメリットと辛いところ~
by
Recruit Technologies
Tableau活用4年の軌跡
by
Recruit Technologies
HadoopをBQにマイグレしようとしてる話
by
Recruit Technologies
LT(自由)
by
Recruit Technologies
リクルートグループの現場事例から見る AI/ディープラーニング ビジネス活用の勘所
by
Recruit Technologies
Company Recommendation for New Graduates via Implicit Feedback Multiple Matri...
by
Recruit Technologies
リクルート式AIの活用法
by
Recruit Technologies
銀行ロビーアシスタント
by
Recruit Technologies
リクルートにおけるマルチモーダル Deep Learning Web API 開発事例
by
Recruit Technologies
ユーザー企業内製CSIRTにおける対応のポイント
by
Recruit Technologies
ユーザーからみたre:Inventのこれまでと今後
by
Recruit Technologies
Struggling with BIGDATA -リクルートおけるデータサイエンス/エンジニアリング-
by
Recruit Technologies
EMRでスポットインスタンスの自動入札ツールを作成する
by
Recruit Technologies
RANCHERを使ったDev(Ops)
by
Recruit Technologies
リクルートにおけるセキュリティ施策方針とCSIRT組織運営のポイント
by
Recruit Technologies
ユーザー企業内製CSIRTにおける対応のポイント
by
Recruit Technologies
リクルートテクノロジーズが語る 企業における、「AI/ディープラーニング」活用のリアル
by
Recruit Technologies
運用で泣かないアーキテクチャで動く原稿作成支援システム ~リクルートにおけるDeepLearning活用事例~
by
Recruit Technologies
分析手法のご紹介
1.
分析手法のご紹介
2.
赤塚:自己紹介 あかつか さとし 赤塚 諭 リクルートテクノロジーズ ITソリューション統括部 ビッグデータ部
ビッグデータ1グループ 経歴 前職で、レポーティング業務及びBIツール導入業務を経験(4年) ・POSデータや注文データから基礎分析やバスケット分析、 クラスタによる顧客管理(施策ターゲットの抽出) ・BIツールでは、QlikViewの代理店としてツール導入だけでなく 導入時の分析画面の設計や使い方のアフターフォロー 所属 2014年11月より株式会社リクルートテクノロジーズにて、 リクルートグループに対して、データ面での意思決定支援業務に従事 現在
3.
クラスタリングのアウトプットイメージ [課題] UI・UX改善が評価がしづらい ■アウトプットイメージ ・ユーザーの質は変わっているのではないか Conversion (仮)詳細閲覧頻度 多い 一見 (仮)一覧ばかり (仮)長期利用 CVなし ユーザーの質 Conversion (仮)詳細閲覧頻度 多い 一見 (仮)一覧ばかり (仮)長期利用 CVなし ユーザーの質をどうやって探るか ▶クラスター分析によってペルソナを定義して セグメンテーションを行う 旧 新 ユーザーの質
4.
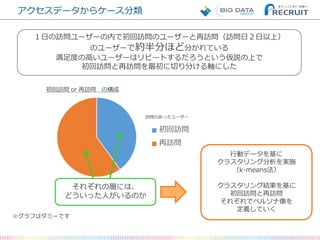
アクセスデータからケース分類 それぞれの層には、 どういった人がいるのか 訪問のあったユーザー 初回訪問 or 再訪問
の構成 1日の訪問ユーザーの内で初回訪問のユーザーと再訪問(訪問日2日以上) のユーザーで約半分ほど分かれている 満足度の高いユーザーはリピートするだろうという仮説の上で 初回訪問と再訪問を最初に切り分ける軸にした 行動データを基に クラスタリング分析を実施 (k-means法) クラスタリング結果を基に 初回訪問と再訪問 それぞれでペルソナ像を 定義していく ※グラフはダミーです
5.
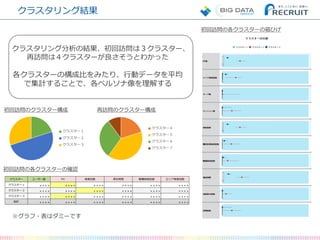
クラスタリング結果 ※グラフ・表はダミーです クラスタリング分析の結果、初回訪問は3クラスター、 再訪問は4クラスターが良さそうとわかった 各クラスターの構成比をみたり、行動データを平均 で集計することで、各ペルソナ像を理解する クラスター ユーザー数 PV
検索回数 滞在時間 職種検索回数 エリア検索回数 クラスター-1 **** **** **** **** **** **** クラスター-2 **** **** **** **** **** **** クラスター-3 **** **** **** **** **** **** 総計 **** **** **** **** **** **** 初回訪問のクラスター構成 初回訪問の各クラスターの確認 初回訪問の各クラスターの箱ひげ 再訪問のクラスター構成
6.
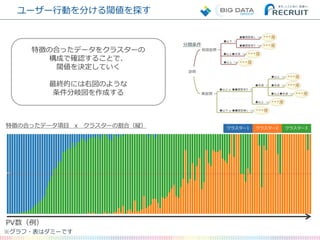
ユーザー行動を分ける閾値を探す クラスター 1 クラスター 2 クラスター 3 特徴の合ったデータ項目 x クラスターの割合(縦)
クラスター1 クラスター2 クラスター3 特徴の合ったデータをクラスターの 構成で確認することで、 閾値を決定していく 最終的には右図のような 条件分岐図を作成する 分類条件 PV数(例) ※グラフ・表はダミーです
7.
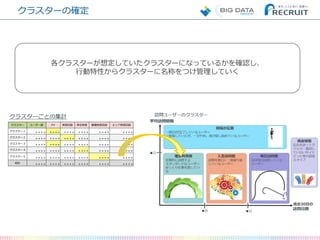
クラスターの確定 過去30日の 各クラスターが想定していたクラスターになっているかを確認し、 行動特性からクラスターに名称をつけ管理していく クラスターごとの集計 クラスター ユーザー数 PV
検索回数 滞在時間 職種検索回数 エリア検索回数 クラスター1 **** **** **** **** **** **** クラスター2 **** **** **** **** **** **** クラスター3 **** **** **** **** **** **** クラスター4 **** **** **** **** **** **** クラスター5 **** **** **** **** **** **** 総計 **** **** **** **** **** ****
8.
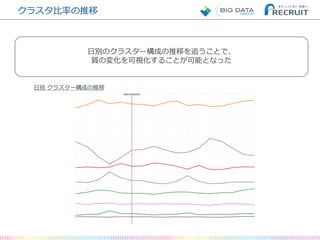
クラスタ比率の推移 日別 クラスター構成の推移 日別のクラスター構成の推移を追うことで、 質の変化を可視化することが可能となった
9.
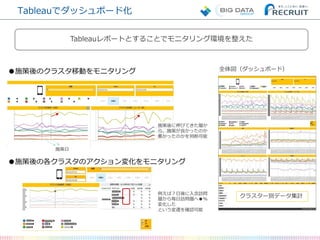
Tableauでダッシュボード化 ●施策後のクラスタ移動をモニタリング ●施策後の各クラスタのアクション変化をモニタリング 施策日 例えば7日後に入念訪問 層から毎日訪問層へ●% 変化した という変遷を確認可能 施策後に伸びてきた層か ら、施策が良かったのか 悪かったのかを判断可能 Tableauレポートとすることでモニタリング環境を整えた 全体図(ダッシュボード) クラスター別データ集計
10.
クラスタリング初めの一歩
11.
クラスタリング手法 クラスターとは、「集落。ある特定のデータの集まり」のこと クラスタリングによって別れたクラスターから、ユーザーがどのようなタイプに別れる のかを把握することができる。 → ペルソナ把握 これによってユーザーを切り分ける時の参考となるデータやユーザー像が分かる。 今回の 分析手法 K-means法 クラスタ作成において、最もポピュラーな手法 ①ランダムに任意のクラスタを割り振る ②クラスタの重心を計算する ③点のクラスタを、一番近い重心のクラスタへ変更する ①:点の色がクラスタ数
②:重心を計算 ③:重心が近いクラスタへ変更 変化がなく なるまで 繰り返す
12.
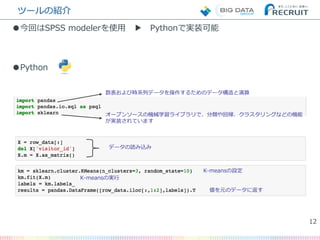
ツールの紹介 12 ●今回はSPSS modelerを使用 ▶
Pythonで実装可能 ●Python 数表および時系列データを操作するためのデータ構造と演算 データの読み込み K-meansの設定 K-meansの実行 値を元のデータに返す オープンソースの機械学習ライブラリで、分類や回帰、クラスタリングなどの機能 が実装されています
13.
参考書籍 13 クラスタリングの基礎を知りたい Pythonは結構ネット上で検索をすると出てきます http://www.mwsoft.jp/programming/numpy/kmeans.html やさしいマーケティングのための多変量解析 クラスタリングと言わず、多変量解析の基礎が わかりやすく解説されています クラスター分析入門
POD版 ―ファジィクラスタリングの理論と応用 クラスタリングに特化してわかりやすく解説さ れています
Download



![クラスタリングのアウトプットイメージ
[課題] UI・UX改善が評価がしづらい
■アウトプットイメージ
・ユーザーの質は変わっているのではないか
Conversion
(仮)詳細閲覧頻度
多い
一見
(仮)一覧ばかり
(仮)長期利用
CVなし
ユーザーの質
Conversion
(仮)詳細閲覧頻度
多い
一見
(仮)一覧ばかり
(仮)長期利用
CVなし
ユーザーの質をどうやって探るか
▶クラスター分析によってペルソナを定義して
セグメンテーションを行う
旧 新
ユーザーの質](https://image.slidesharecdn.com/20160208datauxcrossing-160215022936/85/slide-3-320.jpg)





![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Ensemble Distribution Distillation](https://cdn.slidesharecdn.com/ss_thumbnails/ensembledistributiondistillation-200110020132-thumbnail.jpg?width=640&height=640&fit=bounds)

















































