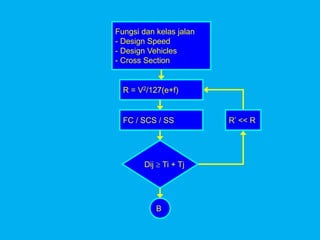
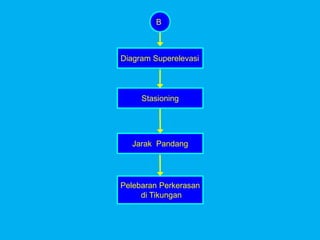
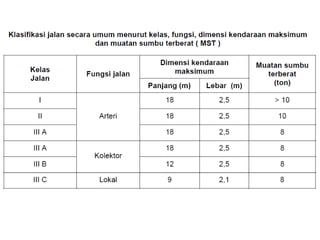
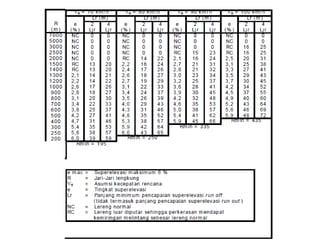
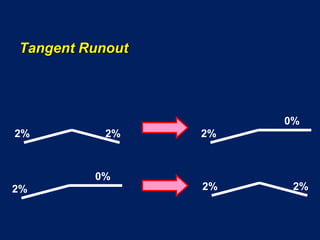
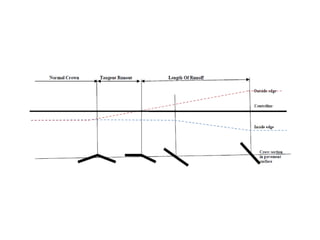
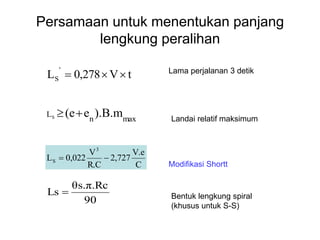
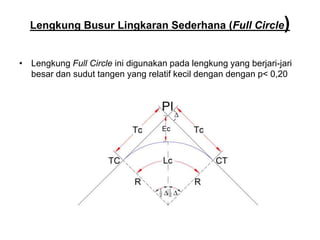
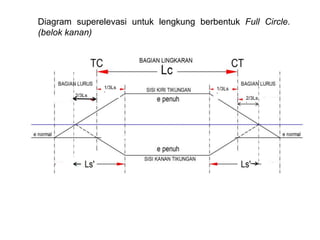
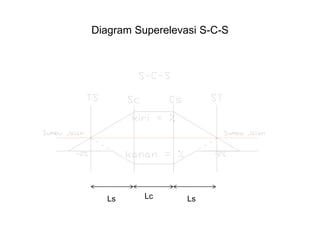
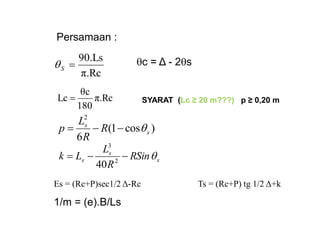
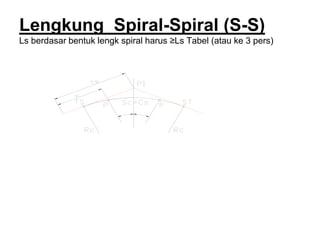
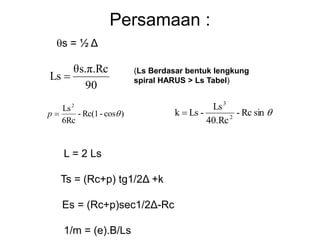
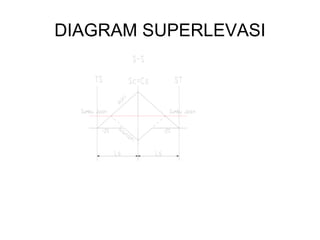
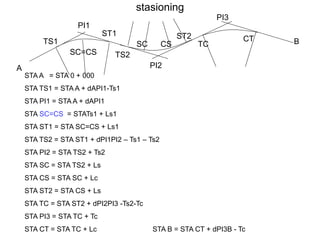
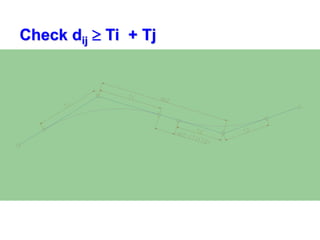
This document discusses horizontal alignment in road design. It covers minimum radii, horizontal curve types including full circle, spiral-circle-spiral and spiral-spiral. It also discusses superelevation diagrams, stationing, sight distance on curves, and widening on curves. Formulas are provided for determining minimum radii based on design speed, superelevation and side friction. Guidelines are given for maximum superelevation and side friction coefficient. The different elements of a horizontal alignment including tangent runout, superelevation runoff and transition curves are described.














































![Aliran Melalui Lubang [Hidraulika]](https://cdn.slidesharecdn.com/ss_thumbnails/aliranmelaluilubang-150623165952-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)






![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)














