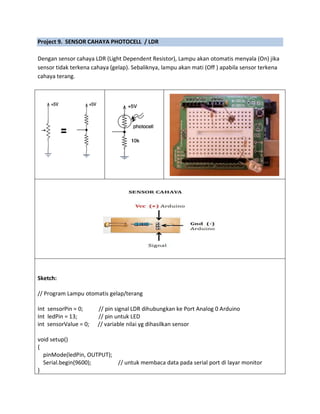
Dokumen tersebut merupakan daftar 17 proyek belajar Arduino yang mencakup topik-topik dasar seperti membuat lampu berkedip, lampu lalu lintas, penggunaan tombol on/off dan potensiometer sebagai input, generator suara, ringtone, pengaturan kecepatan motor dan intensitas cahaya menggunakan PWM, display LCD, sensor cahaya dan suhu, pengukur jarak, detektor gerak, remote control, sensor garis, penggunaan relay, dan motor driver.
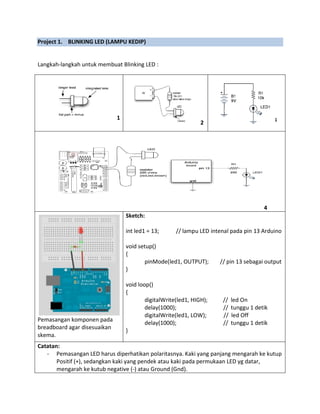






![Project 6. RINGTONE
// Program Ringtone 1
int speakerPin = 9; // kutup + buzzer atau speaker dipasang pada pin 9 Arduino
//LAGU 1 (DO RE MI FA SOL …)
int length = 16; // ini panjang lagu
char notes[] = "cdefgabCCbagfedc"; // ini lagunya
int beats[] = { 1, 1, 1, 1, 1, 1, 1, 4, 1, 1, 1, 1, 1, 1, 1, 4 }; // ini ketukannya
/*
// LAGU 2 (Twinkle twinkle)
int length = 15; // ini panjang lagu
char notes[] = "ccggaagffeeddc "; // ini lagunya
int beats[] = { 1, 1, 1, 1, 1, 1, 2, 1, 1, 1, 1, 1, 1, 2, 4 }; // ini ketukannya
*/
/*
//LAGU 3 (do mi sol Do …Do sol mi do)
int length = 8 ; // ini panjang lagu
char notes[] = "cegCCgec"; // ini lagunya
int beats[] = { 1, 1, 1, 4, 1, 1, 1, 4 }; // ini ketukannya
*/
int tempo = 300;
void playTone(int tone, int duration) {
for (long i = 0; i < duration * 1000L; i += tone * 2) {
digitalWrite(speakerPin, HIGH);
delayMicroseconds(tone);
digitalWrite(speakerPin, LOW);
delayMicroseconds(tone);
}
}
void playNote(char note, int duration) {
char names[] = { 'c', 'd', 'e', 'f', 'g', 'a', 'b', 'C' };
int tones[] = { 1915, 1700, 1519, 1432, 1275, 1136, 1014, 956 };](https://image.slidesharecdn.com/17proyekarduino-171111115005/85/17-proyek-arduino-12-320.jpg)
![// play the tone corresponding to the note name
for (int i = 0; i < 8; i++) {
if (names[i] == note) {
playTone(tones[i], duration);
}
}
}
void setup() {
pinMode(speakerPin, OUTPUT);
}
void loop() {
for (int i = 0; i < length; i++) {
if (notes[i] == ' ') {
delay(beats[i] * tempo); // rest
} else {
playNote(notes[i], beats[i] * tempo);
}
// pause between notes
delay(tempo / 2);
}
}
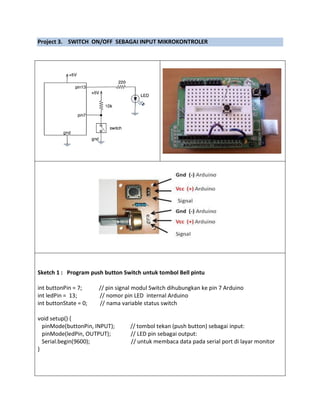
Catatan:
Suara yang dihasilkan buzzer kualitasnya kurang baik, karena buzzer diperuntukkan sebagai alarm.
Untuk kualitas yang lebih baik, sebaiknya buzzer diganti dengan speaker kecil 8 Ohm.](https://image.slidesharecdn.com/17proyekarduino-171111115005/85/17-proyek-arduino-13-320.jpg)