This document defines several basic concepts related to electric machines:
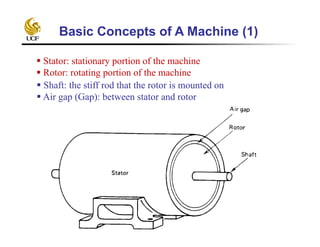
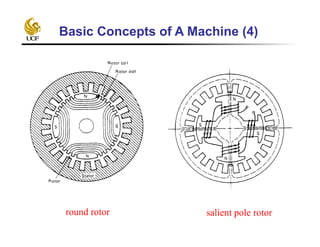
- The stator is the stationary part, and the rotor is the rotating part connected to the shaft. An air gap separates the stator and rotor.
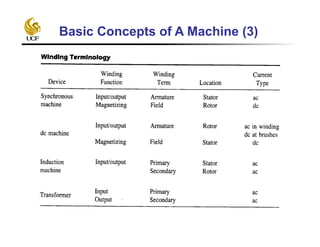
- Machines can be DC or AC depending on the input/output current type. AC machines include synchronous and induction machines.
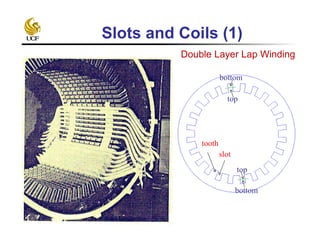
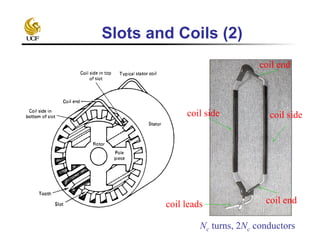
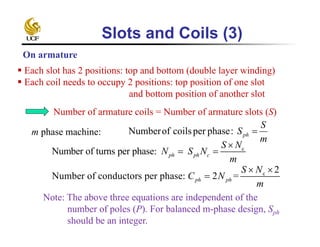
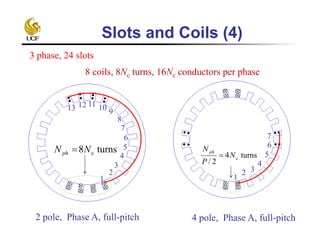
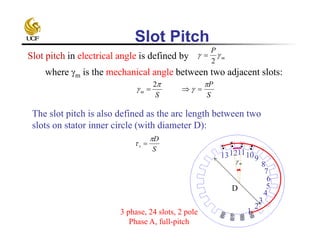
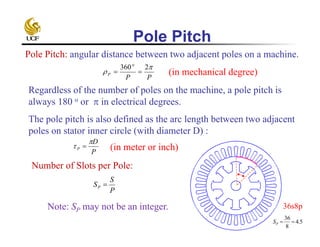
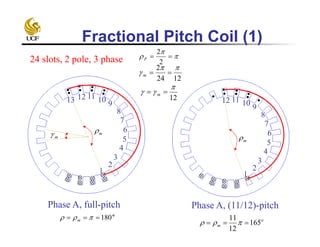
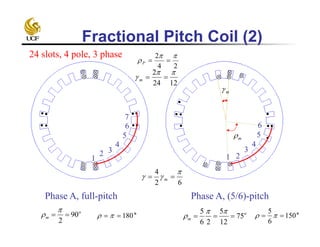
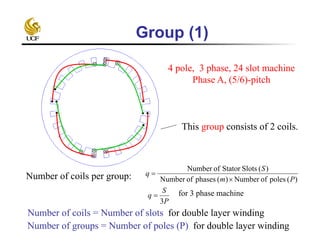
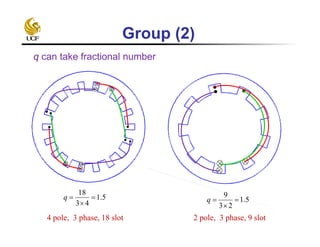
- Other concepts defined include the armature, field windings, load and magnetizing currents, slots/coils configuration, pole/slot pitch, and fractional vs full pitch coils.
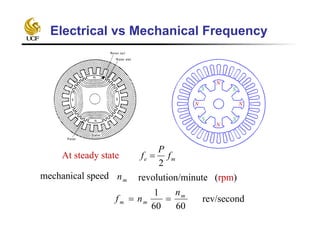
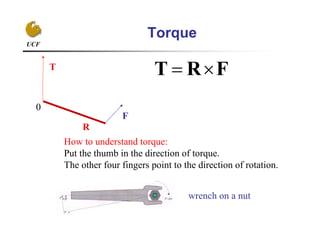
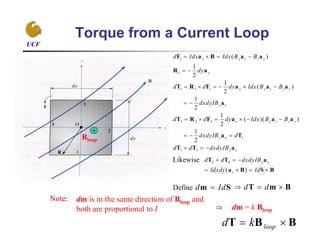
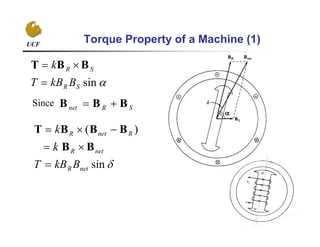
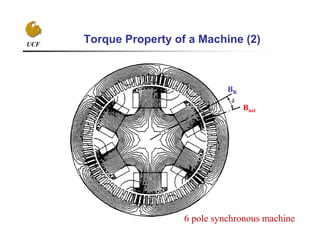
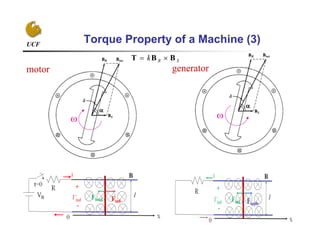
- The torque produced in a current loop is proportional to the cross product of the magnetic field and current. The torque produced in a machine depends on the sine of the rotor position and