Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Satoshi Maemoto
2,567 views
KINECT Mixed Reality
2016/01/26 会津大学講義用
Technology
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Downloaded 13 times
1
/ 26
2
/ 26
3
/ 26
4
/ 26
5
/ 26
6
/ 26
7
/ 26
8
/ 26
9
/ 26
10
/ 26
11
/ 26
12
/ 26
13
/ 26
14
/ 26
15
/ 26
16
/ 26
17
/ 26
18
/ 26
19
/ 26
20
/ 26
21
/ 26
22
/ 26
23
/ 26
24
/ 26
25
/ 26
26
/ 26
More Related Content
PDF
きゃらみらーでユニティちゃんとダンス!
by
Satoshi Maemoto
PDF
20151124.会津大学 JINS MEME 概要 & Unity Plugin作成
by
Satoshi Maemoto
PDF
ショッカソンのみなさんこんばんは 今注目のコミュニティーTMCN Lightning自己紹介
by
Satoshi Maemoto
PDF
数万円のセンサー&デバイスで できる 楽しいデジタルパフォーマンス
by
Satoshi Maemoto
PDF
Unity-Photon-WebGL Handson 20160626.WTM
by
Satoshi Maemoto
PDF
HMCN - センサー&デバイスでできる楽しい事例紹介
by
Satoshi Maemoto
PDF
沖縄まで踊りに来たぜ!VR/AR/MR最前線
by
Satoshi Maemoto
PDF
MakersHubMeetup! 「大阪のIoTスタートアップと 東京のセンサー好き飲み会が 手を組んでみた!」
by
Satoshi Maemoto
きゃらみらーでユニティちゃんとダンス!
by
Satoshi Maemoto
20151124.会津大学 JINS MEME 概要 & Unity Plugin作成
by
Satoshi Maemoto
ショッカソンのみなさんこんばんは 今注目のコミュニティーTMCN Lightning自己紹介
by
Satoshi Maemoto
数万円のセンサー&デバイスで できる 楽しいデジタルパフォーマンス
by
Satoshi Maemoto
Unity-Photon-WebGL Handson 20160626.WTM
by
Satoshi Maemoto
HMCN - センサー&デバイスでできる楽しい事例紹介
by
Satoshi Maemoto
沖縄まで踊りに来たぜ!VR/AR/MR最前線
by
Satoshi Maemoto
MakersHubMeetup! 「大阪のIoTスタートアップと 東京のセンサー好き飲み会が 手を組んでみた!」
by
Satoshi Maemoto
What's hot
PPTX
世界を変える先端Itテクノロジー
by
Satoshi Maemoto
PDF
ハイテクで最新なブーブークッションをつくってみました
by
Satoshi Maemoto
PDF
Kinect Camp with TMCN 「Kinectでできる"楽しい"事例紹介」
by
Satoshi Maemoto
PDF
KinectV2×Unityなら ゲームからヘルスケアまで
by
Satoshi Maemoto
PDF
VR/AR/MRってなんですか?
by
Satoshi Maemoto
PDF
Unityでホログラフィックunityちゃんを呼び出す方法
by
Satoshi Maemoto
PDF
デブサミ2015 KINECT V2+UnityでVRコンテンツを作ってみたら楽しかった
by
Satoshi Maemoto
PDF
ARもVRもMRもまとめてドーン
by
Satoshi Maemoto
PPTX
Kinect * Unity で立体視するよ!
by
甚伍 尾坂
PDF
ARもVRもMRもまとめてドーン
by
Satoshi Maemoto
PDF
ARもVRもMRもまとめてドドンドーン!
by
Satoshi Maemoto
PPTX
Micde slide
by
akihikokumagai1
PPT
第2回スマートフォン講座
by
Shinichi Kosaki
PDF
活動量計について
by
Yukio Saito
世界を変える先端Itテクノロジー
by
Satoshi Maemoto
ハイテクで最新なブーブークッションをつくってみました
by
Satoshi Maemoto
Kinect Camp with TMCN 「Kinectでできる"楽しい"事例紹介」
by
Satoshi Maemoto
KinectV2×Unityなら ゲームからヘルスケアまで
by
Satoshi Maemoto
VR/AR/MRってなんですか?
by
Satoshi Maemoto
Unityでホログラフィックunityちゃんを呼び出す方法
by
Satoshi Maemoto
デブサミ2015 KINECT V2+UnityでVRコンテンツを作ってみたら楽しかった
by
Satoshi Maemoto
ARもVRもMRもまとめてドーン
by
Satoshi Maemoto
Kinect * Unity で立体視するよ!
by
甚伍 尾坂
ARもVRもMRもまとめてドーン
by
Satoshi Maemoto
ARもVRもMRもまとめてドドンドーン!
by
Satoshi Maemoto
Micde slide
by
akihikokumagai1
第2回スマートフォン講座
by
Shinichi Kosaki
活動量計について
by
Yukio Saito
Viewers also liked
PDF
Magical Mirror
by
Satoshi Maemoto
PDF
LODGEのいいところあげていきます!
by
Satoshi Maemoto
PDF
Kinect やセンサーデバイスと連動した楽しいアプリ開発
by
Satoshi Maemoto
PDF
気持ちよい操作感を演出するスタイリッシュモーションという考え方
by
Akira Hatsune
PPTX
EC-CUBE Ver2とVer3 どう違う? 構築と運用の実際
by
俊雄 朝山
PDF
URA ONI GOCCO-VR JUM ハッカソン結果報告
by
Takeshi Yanagiya
Magical Mirror
by
Satoshi Maemoto
LODGEのいいところあげていきます!
by
Satoshi Maemoto
Kinect やセンサーデバイスと連動した楽しいアプリ開発
by
Satoshi Maemoto
気持ちよい操作感を演出するスタイリッシュモーションという考え方
by
Akira Hatsune
EC-CUBE Ver2とVer3 どう違う? 構築と運用の実際
by
俊雄 朝山
URA ONI GOCCO-VR JUM ハッカソン結果報告
by
Takeshi Yanagiya
Similar to KINECT Mixed Reality
PDF
vrmr-170602064754 2.pdf
by
HiroakiKitahara
PDF
センサー・VR・MR 基本とオススメ
by
Satoshi Maemoto
PDF
SUPER HIGH-TECH UNC で実現する新しい世界
by
Satoshi Maemoto
PDF
第5回業開中心会議
by
Kaoru NAKAMURA
PDF
Internet of UNCで実現する新しい共有体験
by
Satoshi Maemoto
PPTX
10年後のIT未来予想図 [センサー&デバイス編]_エフスタ!!TOKYO_20141205
by
Takesen - Takehisa Ito
PDF
ウェアラブルデバイスとモーションセンサーの融合
by
Kaoru NAKAMURA
PDF
DevSumi 2014[14-C-5]
by
Kaoru NAKAMURA
PDF
楽しいものづくり ファーストステップ
by
Satoshi Maemoto
PPTX
「少し先の未来」 -センサー&デバイス編- 東北デベロッパーズカンファレンス2015
by
Takesen - Takehisa Ito
PDF
20110819 関西 kinect勉強会 初級編
by
誠 山崎
PDF
TMCN振り返り 令和ver
by
Satoshi Maemoto
PDF
HoloLensとさまざまなデバイス連携ドドンドーン
by
Satoshi Maemoto
PDF
内蔵化、モバイル化に向かうDepthセンサー
by
Kaoru NAKAMURA
PPTX
MixedReality技術とその活用事例~xR(VR/AR/MR...)への基礎知識~
by
Takahiro Miyaura
PDF
Kinect for Windows およびDepthセンサーの動向
by
Kaoru NAKAMURA
PDF
MRTK V2.3 Spatial Awareness
by
Yuichi Ishii
PPTX
Kinect深度情報処理入門
by
伸男 伊藤
PPTX
ViEW2013 「SS-01 画像センサと応用事例の紹介」
by
Tsukasa Sugiura
PPTX
現実世界コンピューティング RealSense とロボットと HoloLens (2019/04/24 Intel RealSense Japan Mee...
by
Yusuke Furuta
vrmr-170602064754 2.pdf
by
HiroakiKitahara
センサー・VR・MR 基本とオススメ
by
Satoshi Maemoto
SUPER HIGH-TECH UNC で実現する新しい世界
by
Satoshi Maemoto
第5回業開中心会議
by
Kaoru NAKAMURA
Internet of UNCで実現する新しい共有体験
by
Satoshi Maemoto
10年後のIT未来予想図 [センサー&デバイス編]_エフスタ!!TOKYO_20141205
by
Takesen - Takehisa Ito
ウェアラブルデバイスとモーションセンサーの融合
by
Kaoru NAKAMURA
DevSumi 2014[14-C-5]
by
Kaoru NAKAMURA
楽しいものづくり ファーストステップ
by
Satoshi Maemoto
「少し先の未来」 -センサー&デバイス編- 東北デベロッパーズカンファレンス2015
by
Takesen - Takehisa Ito
20110819 関西 kinect勉強会 初級編
by
誠 山崎
TMCN振り返り 令和ver
by
Satoshi Maemoto
HoloLensとさまざまなデバイス連携ドドンドーン
by
Satoshi Maemoto
内蔵化、モバイル化に向かうDepthセンサー
by
Kaoru NAKAMURA
MixedReality技術とその活用事例~xR(VR/AR/MR...)への基礎知識~
by
Takahiro Miyaura
Kinect for Windows およびDepthセンサーの動向
by
Kaoru NAKAMURA
MRTK V2.3 Spatial Awareness
by
Yuichi Ishii
Kinect深度情報処理入門
by
伸男 伊藤
ViEW2013 「SS-01 画像センサと応用事例の紹介」
by
Tsukasa Sugiura
現実世界コンピューティング RealSense とロボットと HoloLens (2019/04/24 Intel RealSense Japan Mee...
by
Yusuke Furuta
More from Satoshi Maemoto
PDF
xR Developerなら知っておきたいカメラの基礎知識
by
Satoshi Maemoto
PDF
MIXED REALITY に REALITY を PLUS するハプティクス技術
by
Satoshi Maemoto
PDF
広島でMixed Realityやりましょう!
by
Satoshi Maemoto
PDF
UNC progress report
by
Satoshi Maemoto
PDF
今話題の!AIoT MR UNCで変わる世界
by
Satoshi Maemoto
PDF
FESTA de UNC
by
Satoshi Maemoto
PDF
UNC近況報告
by
Satoshi Maemoto
PDF
xRLT vol.01 LT
by
Satoshi Maemoto
PDF
きゃらみらーでユニティちゃんと踊ろう!
by
Satoshi Maemoto
PDF
TMCN と HMCNって何? という質問にお答えします。
by
Satoshi Maemoto
xR Developerなら知っておきたいカメラの基礎知識
by
Satoshi Maemoto
MIXED REALITY に REALITY を PLUS するハプティクス技術
by
Satoshi Maemoto
広島でMixed Realityやりましょう!
by
Satoshi Maemoto
UNC progress report
by
Satoshi Maemoto
今話題の!AIoT MR UNCで変わる世界
by
Satoshi Maemoto
FESTA de UNC
by
Satoshi Maemoto
UNC近況報告
by
Satoshi Maemoto
xRLT vol.01 LT
by
Satoshi Maemoto
きゃらみらーでユニティちゃんと踊ろう!
by
Satoshi Maemoto
TMCN と HMCNって何? という質問にお答えします。
by
Satoshi Maemoto
KINECT Mixed Reality
1.
OpenAppLab センサーコース KINECT Mixed Reality 一般社団法人T.M.C.N
/ 株式会社システムフレンド 前本 知志
2.
・システムフレンドという会社でセンサー&デバイス部長やってます! KINECT等のセンサーを使ったアプリ(イベント用コンテンツ、医療ヘルスケア系) スマフォのARアプリ(最近はやりのぬり絵してキャラに取り込めるやつとか) を作っています。 http://www.systemfriend.co.jp/kinect_nui ・エアー書道では何度かテレビ出演をしています 2013年1月6日 東京MX TV
「Tokyo, Boy」 新年スペシャル 2013年8月26日 日本テレビ 「NEWS ZERO」 などなど。 ・TMCN (Tokyo MotionControl Network) Co-founder(理事) https://www.facebook.com/TokyoMotioncontrolNetwork 自己紹介
3.
こういうのを作ってます。 https://youtu.be/ZSXwhj8HqkE https://youtu.be/YxCGnmfChKk
4.
書籍執筆 https://www.shoeisha.co.jp/book/detail/9784798139630 Intel RealSense SDK センサープログラミング 2015/5/12発売 中村
薫, 前本 知志, 斎藤 裕佑, 谷口 直嗣, 初音 玲 (Tokyo MotionControl Network) 2016/01/23 update RealSenseハッカソンで優勝しました。 RealSenseでMRしました。 http://www.systemfriend.co.jp/node/687
5.
このセッションのながれ 1 • Mixed Reality(MR)とは 2 •
KINECT-MR実現へのステップ 3 • KINECT-MR GPU処理について
6.
Mixed Reality(MR)とは
7.
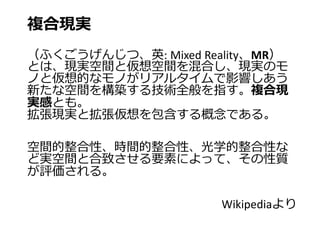
複合現実 (ふくごうげんじつ、英: Mixed Reality、MR) とは、現実空間と仮想空間を混合し、現実のモ ノと仮想的なモノがリアルタイムで影響しあう 新たな空間を構築する技術全般を指す。複合現 実感とも。 拡張現実と拡張仮想を包含する概念である。 空間的整合性、時間的整合性、光学的整合性な ど実空間と合致させる要素によって、その性質 が評価される。 Wikipediaより
8.
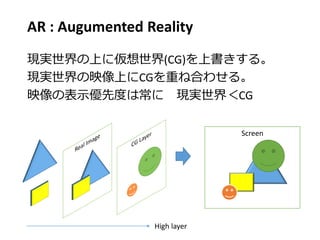
AR : Augumented
Reality 現実世界の上に仮想世界(CG)を上書きする。 現実世界の映像上にCGを重ね合わせる。 映像の表示優先度は常に 現実世界<CG Screen High layer
9.
AR の例
10.
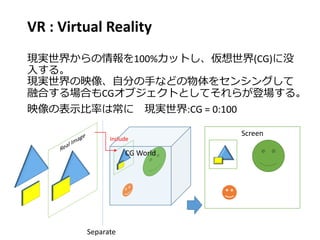
VR : Virtual
Reality 現実世界からの情報を100%カットし、仮想世界(CG)に没 入する。 現実世界の映像、自分の手などの物体をセンシングして 融合する場合もCGオブジェクトとしてそれらが登場する。 映像の表示比率は常に 現実世界:CG = 0:100 Screen Separate CG World Include
11.
VR の例
12.
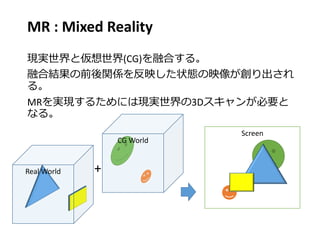
MR : Mixed
Reality 現実世界と仮想世界(CG)を融合する。 融合結果の前後関係を反映した状態の映像が創り出され る。 MRを実現するためには現実世界の3Dスキャンが必要と なる。 Screen + MR World CG World Real World
13.
MR の例
14.
KINECT-MR 実現へのステップ with Unity3D
15.
KINECTでのMR(きゃらみらー) • KINECTのColorとDepthを利用してMR映像をリア ルタイムに生成する • KINECTを頭に装着し、MR映像をHMDに入力す れば動き回れないHoloLensになる状態
16.
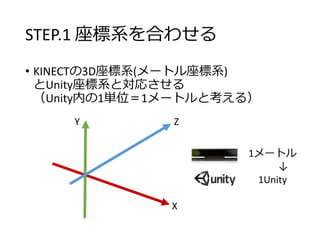
STEP.1 座標系を合わせる • KINECTの3D座標系(メートル座標系) とUnity座標系と対応させる (Unity内の1単位=1メートルと考える) X Y
Z 1メートル ↓ 1Unity
17.
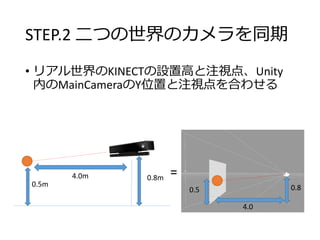
STEP.2 二つの世界のカメラを同期 • リアル世界のKINECTの設置高と注視点、Unity 内のMainCameraのY位置と注視点を合わせる 0.8m 0.5m 4.0m 0.8 4.0 0.5 =
18.
STEP.2 二つの世界のカメラを同期 「きゃらみらー」では、、 • 初期状態でMainCameraは(0,0,0)にある •
KINECTのBodyFrame.FloorClipPlane.Wが床に対する KINECTの高さを表すのでY位置を自動同期する • MainCameraは(0,Y,0)から(0,1,4)を見つめるように傾 きを自動設定する。 • KINECTのカメラが見つめる位置を4メートル先の床 上空1メートルになるように手動調整する (KINECTのチルトをAPIで制御できれば自動ででき たのに…)
19.
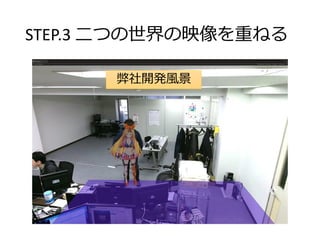
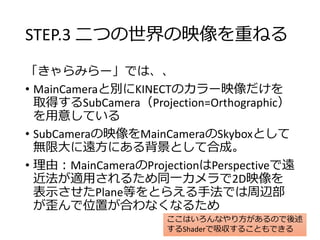
STEP.3 二つの世界の映像を重ねる 弊社開発風景
20.
STEP.3 二つの世界の映像を重ねる 「きゃらみらー」では、、 • MainCameraと別にKINECTのカラー映像だけを 取得するSubCamera(Projection=Orthographic) を用意している •
SubCameraの映像をMainCameraの無限大に遠方 にある背景映像として合成。 • 理由:MainCameraのProjectionはPerspectiveで遠 近法が適用されるため同一カメラで2D映像を 表示させたPlane等をとらえる手法では周辺部 が歪んで位置が合わなくなるため ここはいろんなやり方があるので後述 するShaderで吸収することもできる
21.
KINECT-MR GPU処理について
22.
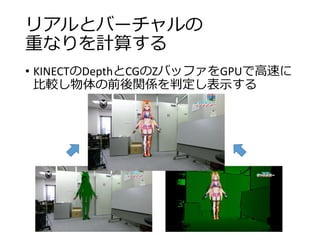
リアルとバーチャルの 重なりを計算する • KINECTのDepthとCGのZバッファをGPUで高速に 比較し物体の前後関係を判定し表示する
23.
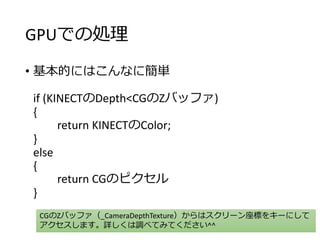
GPUでの処理 • 基本的にはこんなに簡単 if (KINECTのDepth<CGのZバッファ) { return
KINECTのColor; } else { return CGのピクセル } CGのZバッファ(_CameraDepthTexture)からはスクリーン座標をキーにして アクセスします。詳しくは調べてみてください^^
24.
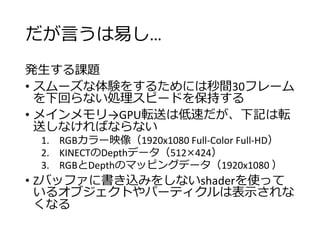
だが言うは易し… 発生する課題 • スムーズな体験をするためには秒間30フレーム を下回らない処理スピードを保持する • メインメモリ→GPU転送は低速だが、下記は転 送しなければならない 1.
RGBカラー映像(1920x1080 Full-Color Full-HD) 2. KINECTのDepthデータ(512×424) 3. RGBとDepthのマッピングデータ(1920x1080 ) • Zバッファに書き込みをしないshaderを使って いるオブジェクトやパーティクルは表示されな くなる
25.
だが言うは易し… 「きゃらみらー」では、、 • メインメモリ→GPUへのデータ転送を数フレー ムに渡って分割したり、送る頻度を展示中でも リアルタイムに調整できる →少々送るのがずれても体験として気にならな いものを見極め、この処理の対象とする • パーティクルについては専用の表示レイヤーを 設けて表示されるようにしている。 その代わりパーティクルについてはMRでなく AR表示となるがあまり気にならない感じ
26.
最後に ぜひがんばってHoloLensが出る前にこれを作っ てください!
Download













































![DevSumi 2014[14-C-5]](https://cdn.slidesharecdn.com/ss_thumbnails/201414-c-5-140215043506-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





















