Downloaded 30 times








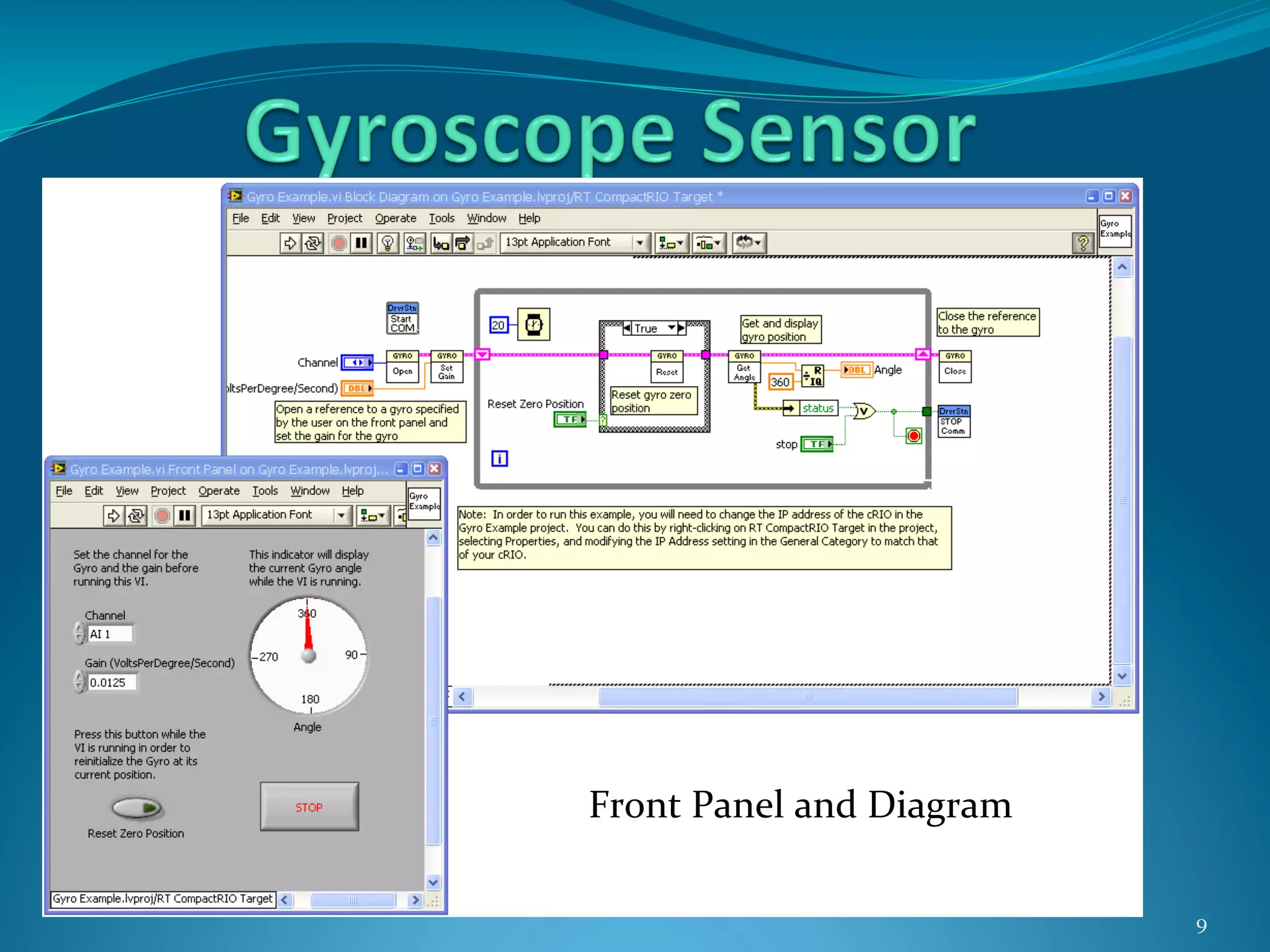













Dennis C. Erickson is a senior mentor for FRC teams 1510 and 2898. He provides guidance on using various sensors to enhance robot operations, including ultrasonic detectors, gyro sensors, accelerometers, and cameras. The document outlines different sensor types and provides code examples and diagrams to help understand how to implement the sensors.