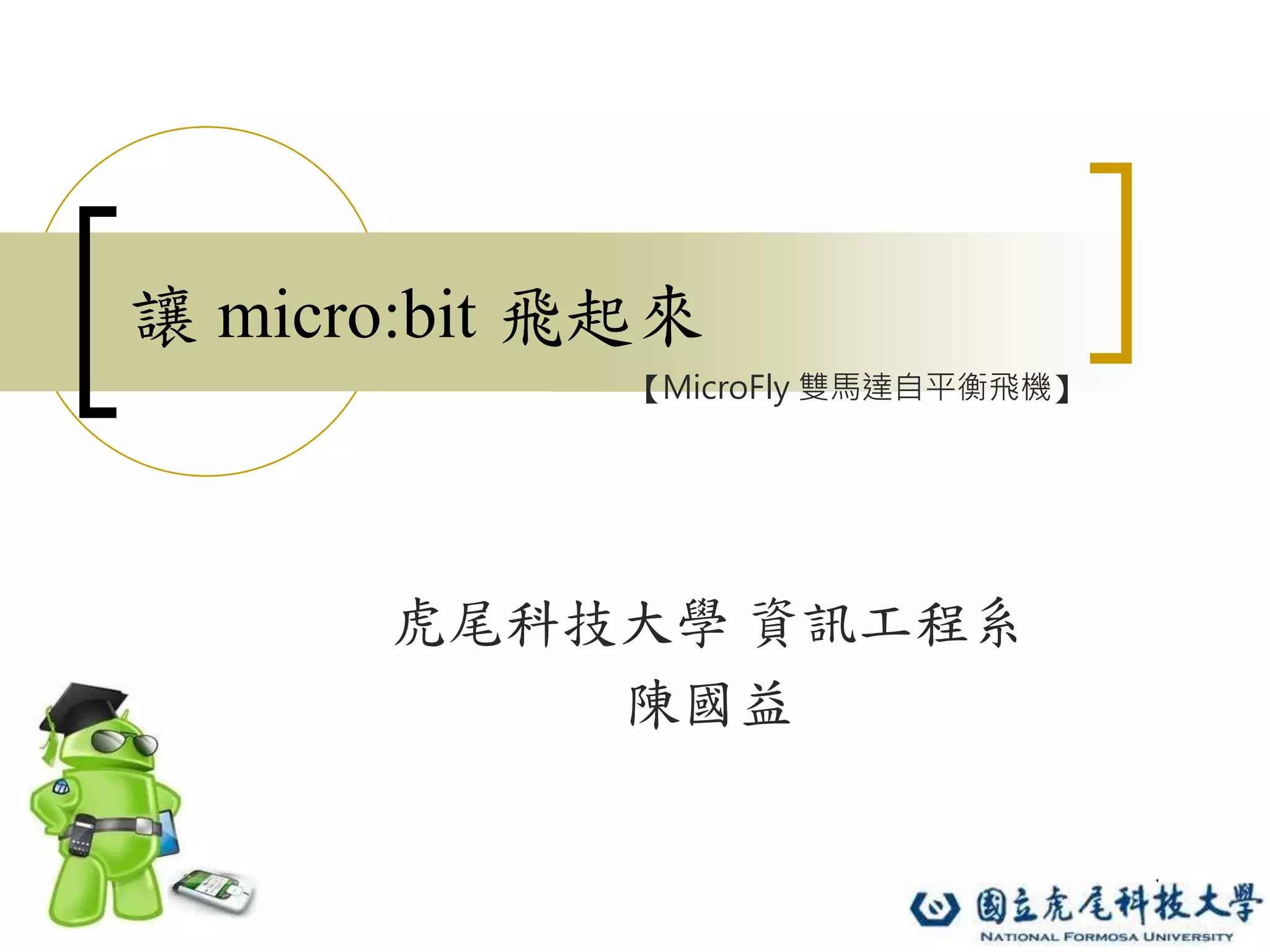
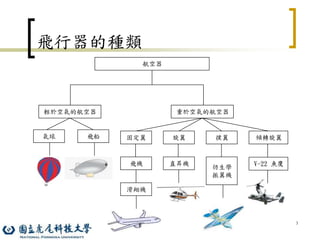
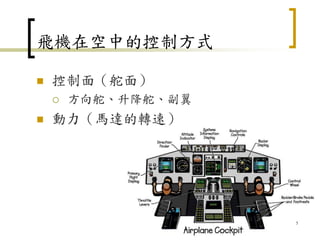
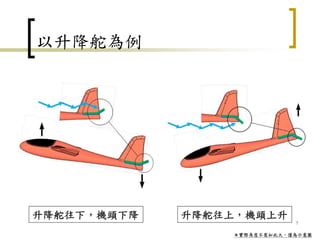
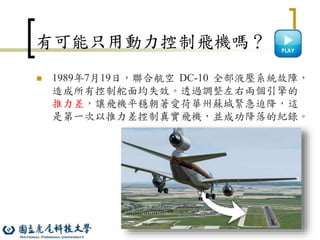
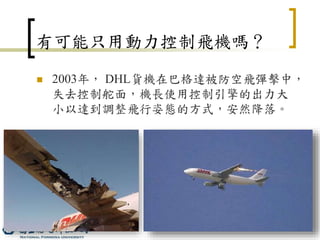
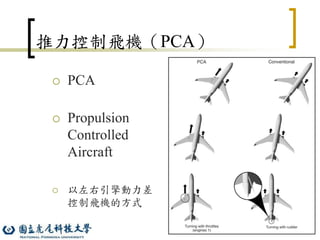
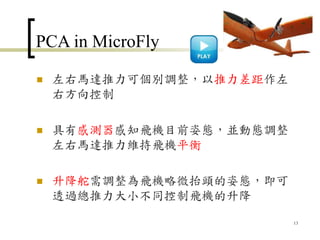
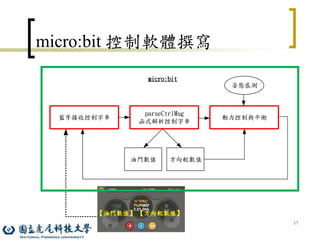
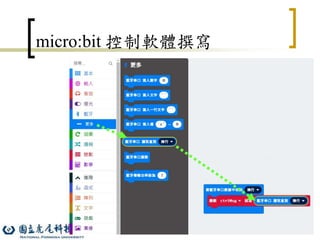
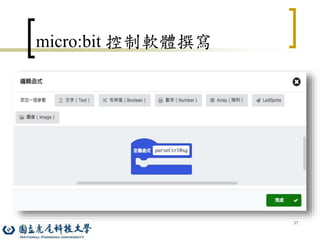
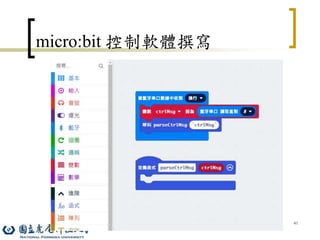
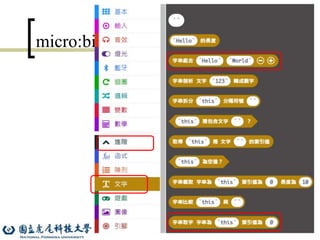
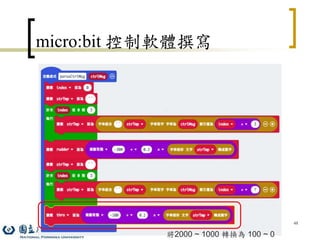
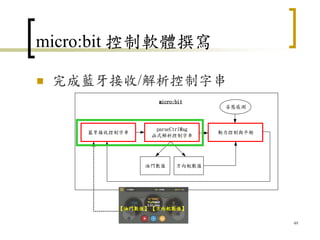
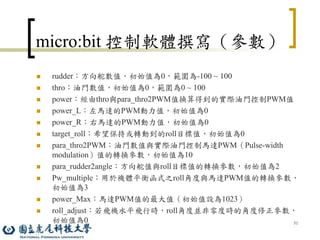
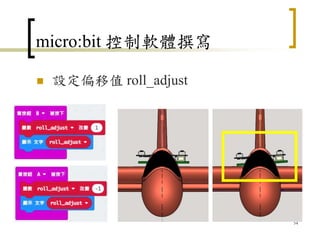
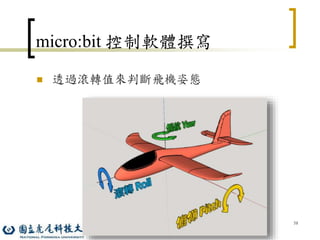
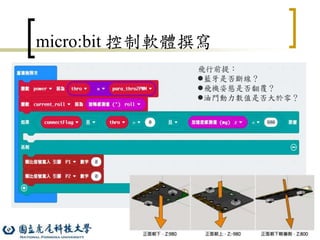
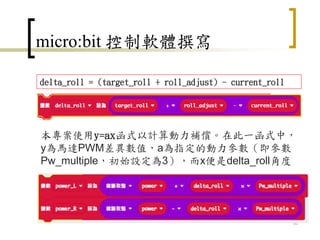
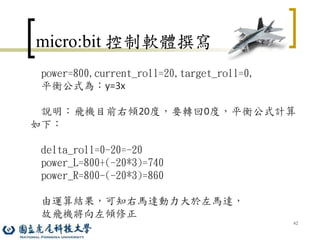
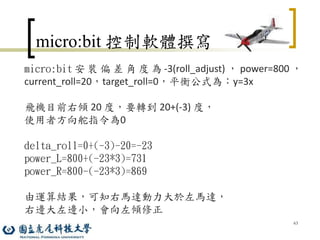
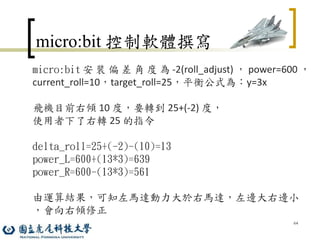
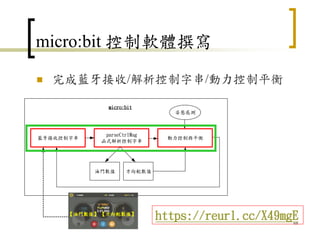
本文介绍了基于 micro:bit 的飞行器控制,包括飞行器类型、推力控制和硬件组装。主要探讨了如何通过动力差控制飞行器的姿态,并结合 AI 技术的潜力。文章还提供了具体的 micro:bit 编程和硬件制作步骤。