Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
KC
Uploaded by
Kuo-Yi Chen
PPT, PDF
295 views
一起動手來造飛機 EPP 兩通道差速遙控飛機
AI-enhanced description
本文件介绍了EPP遥控飞机的制作和调试过程,包括校正、部件安装、系统测试及飞行技巧。详细说明了各个步骤的操作方法、材料特性及调整重心的重要性。旨在通过实践提升飞行技能,确保飞机的稳定和性能。
Education
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 54
2
/ 54
3
/ 54
4
/ 54
5
/ 54
6
/ 54
7
/ 54
8
/ 54
9
/ 54
10
/ 54
11
/ 54
12
/ 54
13
/ 54
14
/ 54
15
/ 54
16
/ 54
Most read
17
/ 54
18
/ 54
19
/ 54
20
/ 54
21
/ 54
22
/ 54
23
/ 54
24
/ 54
25
/ 54
26
/ 54
27
/ 54
28
/ 54
29
/ 54
30
/ 54
31
/ 54
32
/ 54
33
/ 54
34
/ 54
35
/ 54
36
/ 54
37
/ 54
38
/ 54
39
/ 54
40
/ 54
41
/ 54
42
/ 54
43
/ 54
44
/ 54
45
/ 54
46
/ 54
47
/ 54
48
/ 54
49
/ 54
50
/ 54
51
/ 54
52
/ 54
53
/ 54
54
/ 54
More Related Content
PPT
AI 生成製圖技術
by
Kuo-Yi Chen
PPT
MicroFly microLbit RC airplane
by
Kuo-Yi Chen
PPT
一起動手來造飛機 升力原理 康達效應
by
Kuo-Yi Chen
PPT
一起動手來造飛機 實體
by
Kuo-Yi Chen
PPT
一起動手來造飛機 EPP 差速PCA遙控飛機
by
Kuo-Yi Chen
PPT
虛擬實境技術簡介 AR VR MR (2021)
by
Kuo-Yi Chen
PPT
一起動手來造飛機 實體紙飛機版 Powerup 2.0 電容動力 (Namakura + Invader)
by
Kuo-Yi Chen
PPT
AR VR 技術應用於特殊教育
by
Kuo-Yi Chen
AI 生成製圖技術
by
Kuo-Yi Chen
MicroFly microLbit RC airplane
by
Kuo-Yi Chen
一起動手來造飛機 升力原理 康達效應
by
Kuo-Yi Chen
一起動手來造飛機 實體
by
Kuo-Yi Chen
一起動手來造飛機 EPP 差速PCA遙控飛機
by
Kuo-Yi Chen
虛擬實境技術簡介 AR VR MR (2021)
by
Kuo-Yi Chen
一起動手來造飛機 實體紙飛機版 Powerup 2.0 電容動力 (Namakura + Invader)
by
Kuo-Yi Chen
AR VR 技術應用於特殊教育
by
Kuo-Yi Chen
More from Kuo-Yi Chen
PPT
一起動手來造飛機 實體紙飛機版 Powerup 2.0 動力 (namakura + invader)
by
Kuo-Yi Chen
PPT
未來的履歷表 虎科大資工系 陳國益
by
Kuo-Yi Chen
PDF
機器人 教具設計
by
Kuo-Yi Chen
PDF
3D 列印技術簡介
by
Kuo-Yi Chen
PDF
物聯網科技與實作 Iot technology and projects
by
Kuo-Yi Chen
PDF
夢想與實作
by
Kuo-Yi Chen
PDF
陳國益 3D 列印技術簡介 Kuo-Yi Chen, 3D print technology
by
Kuo-Yi Chen
PPT
100讀書會講綱100.04.07
by
Kuo-Yi Chen
PPT
100讀書會講綱100.04.07
by
Kuo-Yi Chen
PPT
初鄉親職講綱100.05.04正確
by
Kuo-Yi Chen
PPT
初鄉親職講綱100.05.04正確
by
Kuo-Yi Chen
PPT
班級經營100.03.30
by
Kuo-Yi Chen
PPT
班級經營100.03.30
by
Kuo-Yi Chen
PPT
班級經營100.03.30
by
Kuo-Yi Chen
PPT
讓錢和孩子一起長大
by
Kuo-Yi Chen
PPT
兒童前期親職教育
by
Kuo-Yi Chen
PPT
兒童前期親職教育
by
Kuo-Yi Chen
DOC
你會教小孩子理財嗎
by
Kuo-Yi Chen
PPT
兒童前期親職教育
by
Kuo-Yi Chen
PPT
讓錢和孩子一起長大
by
Kuo-Yi Chen
一起動手來造飛機 實體紙飛機版 Powerup 2.0 動力 (namakura + invader)
by
Kuo-Yi Chen
未來的履歷表 虎科大資工系 陳國益
by
Kuo-Yi Chen
機器人 教具設計
by
Kuo-Yi Chen
3D 列印技術簡介
by
Kuo-Yi Chen
物聯網科技與實作 Iot technology and projects
by
Kuo-Yi Chen
夢想與實作
by
Kuo-Yi Chen
陳國益 3D 列印技術簡介 Kuo-Yi Chen, 3D print technology
by
Kuo-Yi Chen
100讀書會講綱100.04.07
by
Kuo-Yi Chen
100讀書會講綱100.04.07
by
Kuo-Yi Chen
初鄉親職講綱100.05.04正確
by
Kuo-Yi Chen
初鄉親職講綱100.05.04正確
by
Kuo-Yi Chen
班級經營100.03.30
by
Kuo-Yi Chen
班級經營100.03.30
by
Kuo-Yi Chen
班級經營100.03.30
by
Kuo-Yi Chen
讓錢和孩子一起長大
by
Kuo-Yi Chen
兒童前期親職教育
by
Kuo-Yi Chen
兒童前期親職教育
by
Kuo-Yi Chen
你會教小孩子理財嗎
by
Kuo-Yi Chen
兒童前期親職教育
by
Kuo-Yi Chen
讓錢和孩子一起長大
by
Kuo-Yi Chen
一起動手來造飛機 EPP 兩通道差速遙控飛機
1.
1 一起動手來造飛機 虎尾科技大學 資訊工程系 陳國益 【EPP兩通道差速遙控飛機】
2.
大綱 EPP 飛機校正
主控電路板安裝 馬達安裝 系統測試 飛行前檢查 重心調整、方向調整 飛行後檢查 問題與解決 2
3.
EPP 飛機校正 拆開包裝,將主翼和尾翼安裝插上
主翼曲面尖端向上 尾翼安裝在下方位置(平飛) 尾翼較翹那面向上(每架飛機不同 3 EPP(聚丙烯塑料發泡材料)是一種性能良好的的高結晶型聚合物/氣體復合材料,以其獨特而優越的性能成為新型抗壓緩沖隔熱材料。EPP製品具有十分優 異的抗震吸能性能、質量輕、形變後恢復率高 EPO(可發泡聚乙烯、苯乙烯聚合物)屬於70%的PS(聚苯乙烯)和30%的PE(聚乙烯)的可發泡共聚物,具有優良的緩沖性能,堅固、耐久和有韌性
4.
EPP 飛機校正 先手拋看看飛行直不直 4
5.
EPP 飛機校正 以偏右為例,有以下幾種解決方案
主翼往右拉出一些 右邊升力大 飛機會往左校正 5
6.
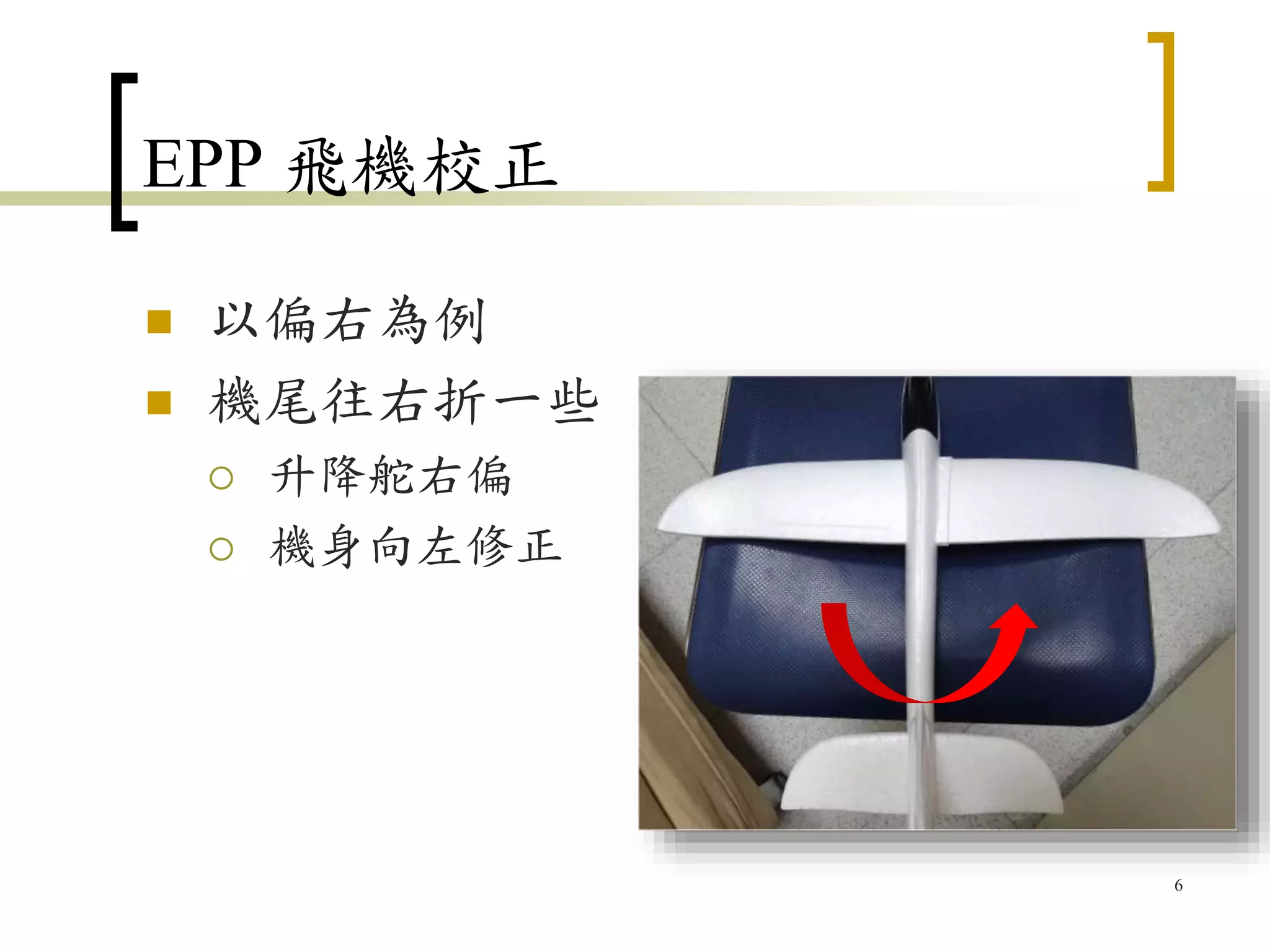
EPP 飛機校正 以偏右為例
機尾往右折一些 升降舵右偏 機身向左修正 6
7.
EPP 飛機校正 打開機頭罩,拆卸配重用鋼珠
鋼珠可保留作為之後特技飛行之用 7
8.
安裝飛控電路板 以膠帶水平固定在機艙罩後方 電池接線朝前、天線朝後
電路板朝上 8
9.
空心杯馬達 施作空心杯馬達,一定不可使底部受力 否則底蓋極易脫開 9
10.
空心杯馬達 如何施力 只能對鐵蓋施力
不可直接對軸心施力 10
11.
空心杯馬達 安裝槳葉時,底蓋一定要有支撐(觸地) 11 觸地 施力 觸地 施力
12.
空心杯馬達與馬達座 以小片膠帶填補縫隙 務求馬達與馬達座緊密不滑動 12
13.
空心杯馬達與馬達座 有兩種安裝方式,透過壓鐵蓋/底蓋施力 塞入馬達座中(切勿壓軸心) 13
14.
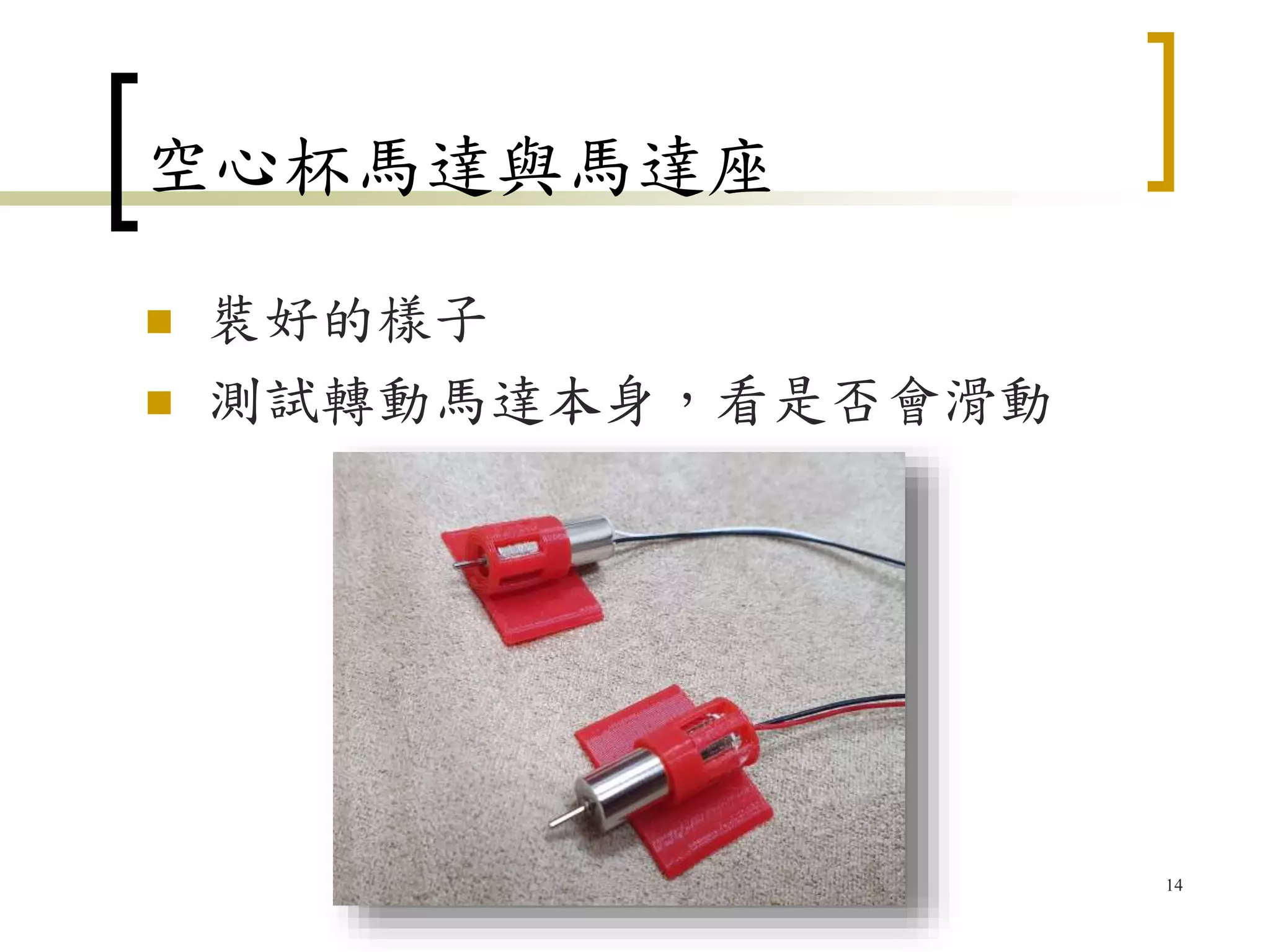
空心杯馬達與馬達座 裝好的樣子 測試轉動馬達本身,看是否會滑動 14
15.
安裝馬達於機翼上(後推) 右邊為藍紅線(藍色槳) 左邊為黑白線(紅色槳)
馬達固定在機翼後緣上翼面 馬達座切齊翼面 離機身中線約十公分 兩邊大致等距即可 15
16.
後推馬達安裝位置 後推形式,馬達安裝在機翼上表面 用以產生抬頭角度 16
17.
安裝馬達於機翼上(後推) 左右平面上膠帶 17
18.
安裝馬達於機翼上(後推) 上面再上膠帶 18
19.
安裝 槳葉 安裝馬達於機翼上(後推) 19 左側黑白線安裝紅槳(圓頭向後)
左側黑紅線安裝藍槳(圓頭向後)
20.
連接馬達與飛控電路板 馬達左右連接到飛控電路板 20
21.
遙控器對頻 飛控電路版接上電池(右側紅燈快速閃爍) 遙控器開機(紅燈快速閃爍) 21 遙控器左手油門快速最大至最小一次 完成對頻(遙控器與飛控板紅燈恆亮)
22.
馬達測試 左手控制油門(動力)大小 22 動力大 動力小
23.
馬達測試 右手控制方向(差速)大小 23 朝右轉
24.
馬達測試 右手控制方向(差速)大小 24 朝左轉
25.
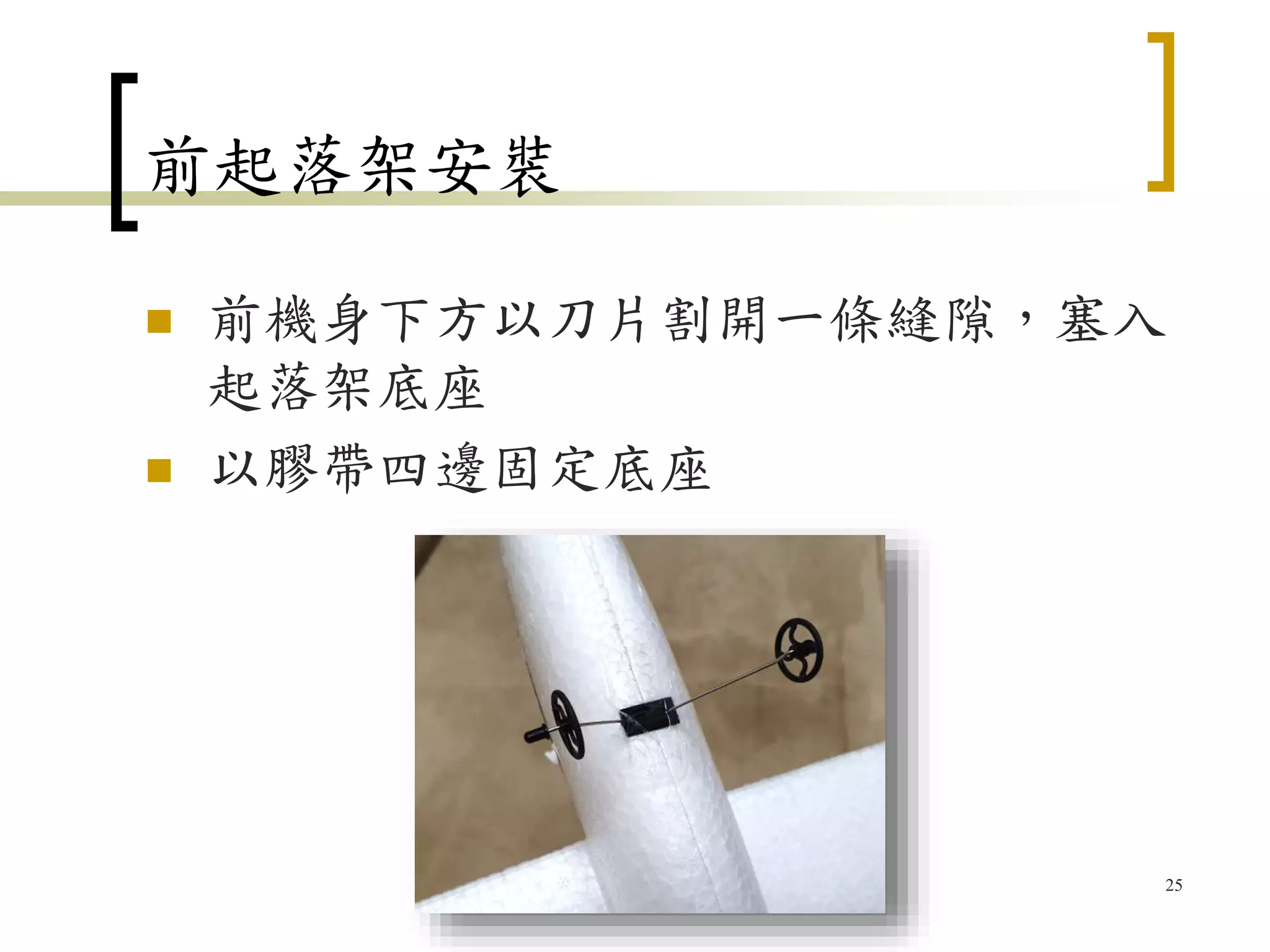
前起落架安裝 前機身下方以刀片割開一條縫隙,塞入 起落架底座 以膠帶四邊固定底座 25
26.
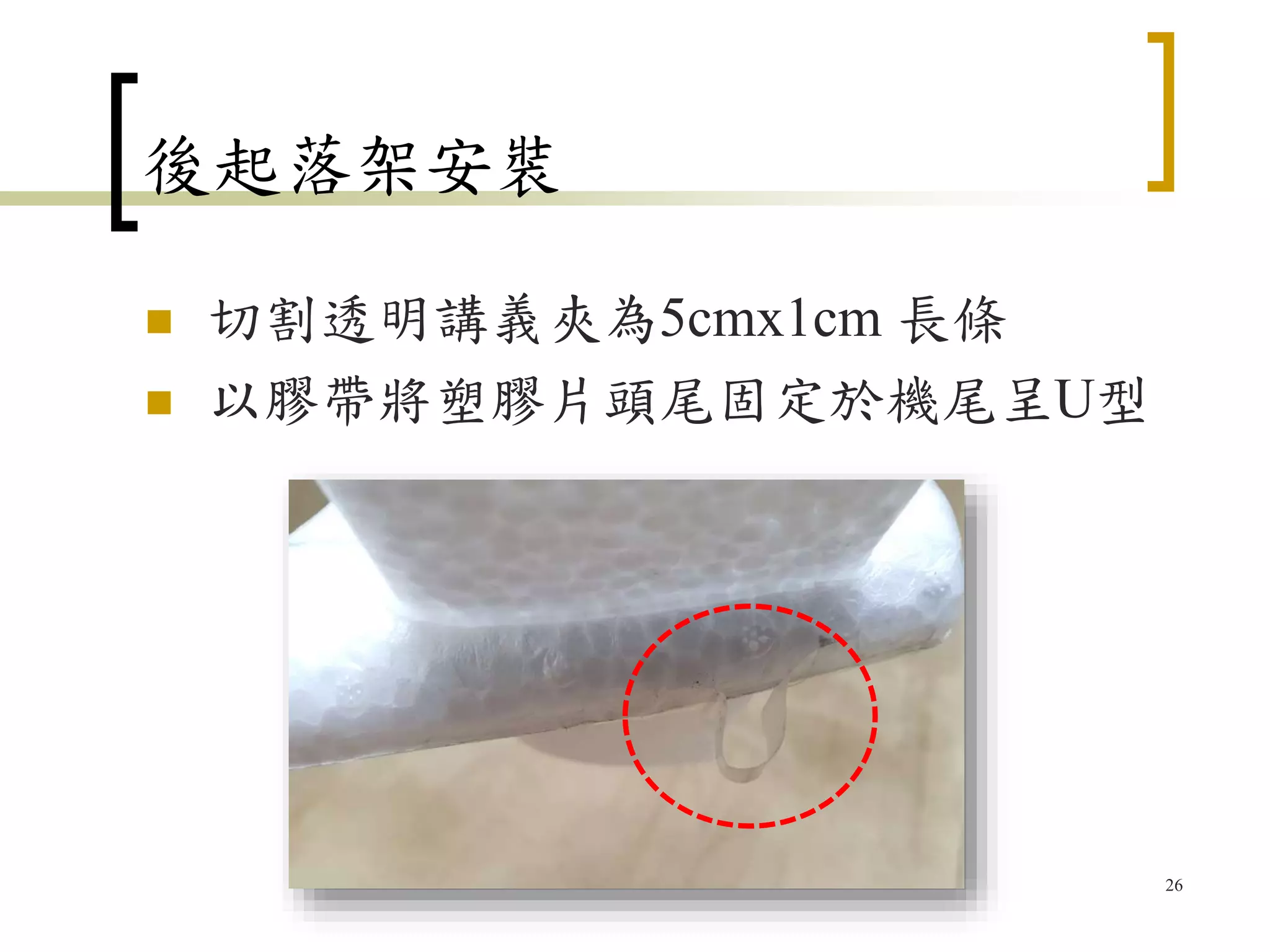
後起落架安裝 切割透明講義夾為5cmx1cm 長條
以膠帶將塑膠片頭尾固定於機尾呈U型 26
27.
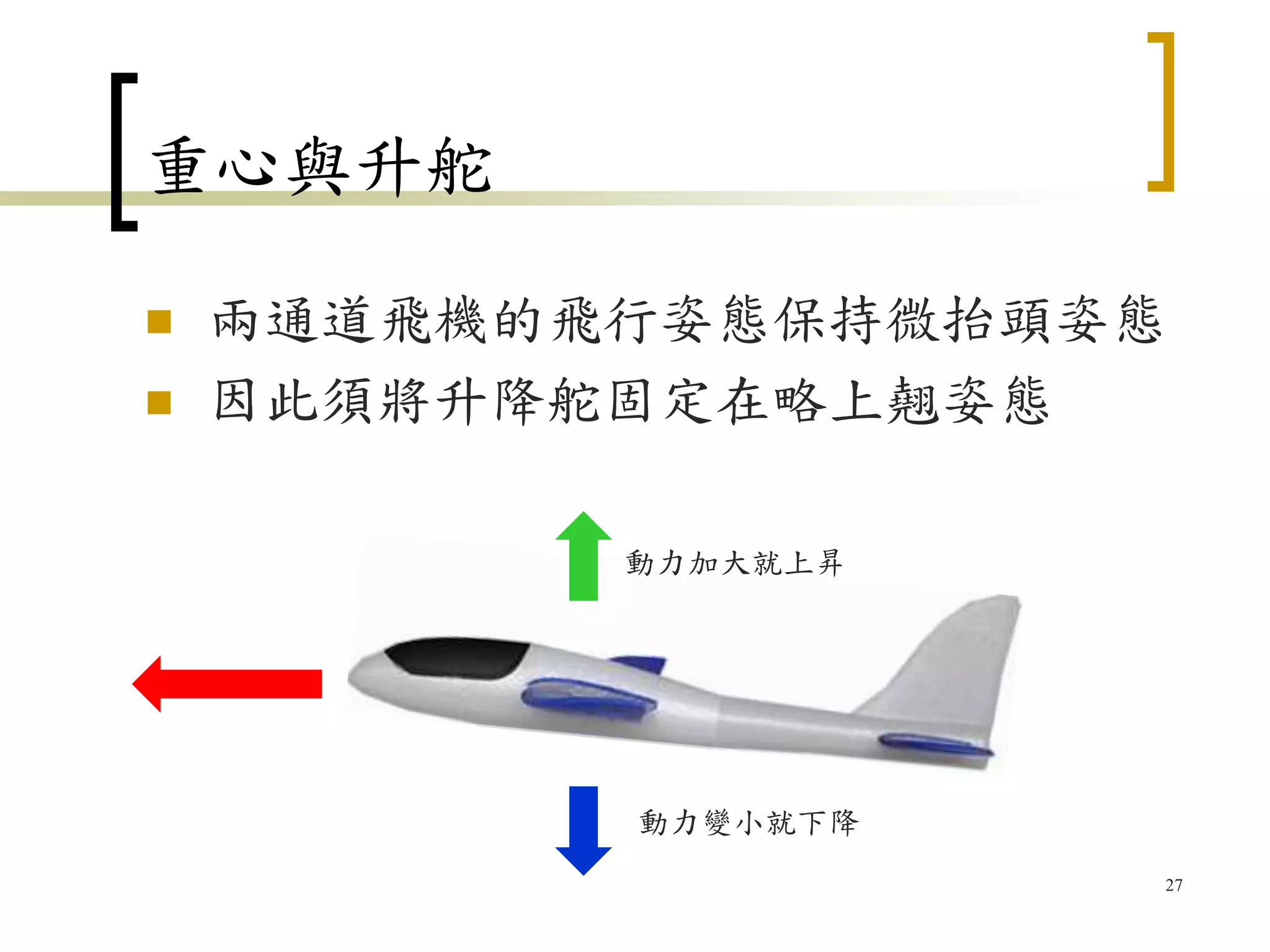
重心與升舵 兩通道飛機的飛行姿態保持微抬頭姿態 因此須將升降舵固定在略上翹姿態 27 動力加大就上昇 動力變小就下降
28.
升降舵的原理 28 升降舵往下,機頭下降 升降舵往上,機頭上升
29.
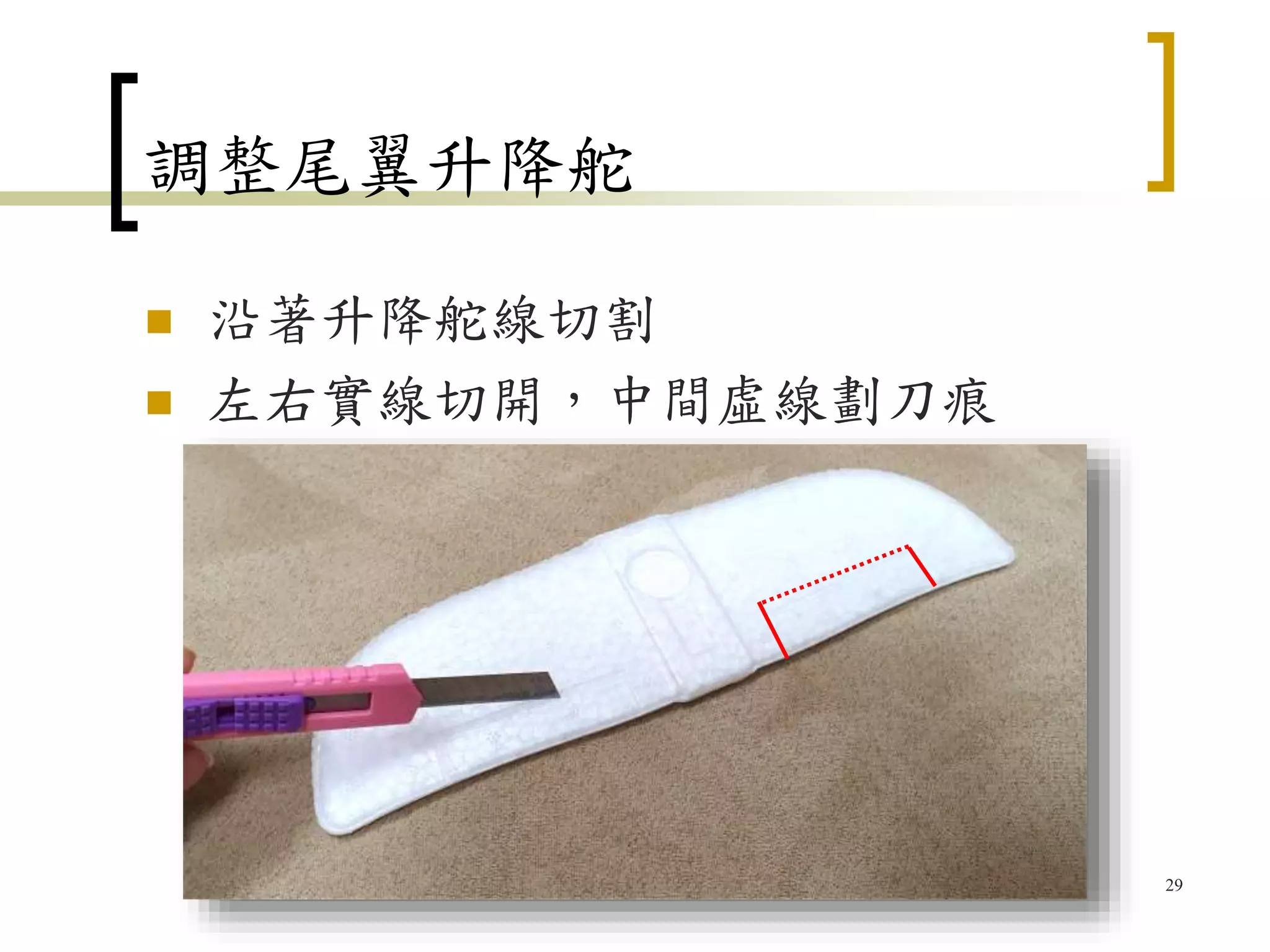
調整尾翼升降舵 沿著升降舵線切割 左右實線切開,中間虛線劃刀痕 29
30.
調整尾翼升降舵 稍微將升降舵調高(約厚度的一半) 並以膠帶固定角度(先固定上面在下面) 30
31.
調整尾翼升降舵 升降舵底面切齊尾翼中線 31
32.
飛機重心調整 重心(center of
gravity, CG) 飛機飛行的關鍵 一般抓在翼面 前 ½ 至 1/3 處 飛機重量、昇舵角度 當天風速 都可以透過 重心調整讓飛機好飛 32
33.
飛機重心調整 先將電池以膠帶固定於機頭處,並以兩 手手指頂住機翼下方找到平衡點 33
34.
飛機重心調整 兩手手指頂住機翼下方找到重心平衡點 先大約抓在翼面前
½ 至 1/3 處,便可試飛 34
35.
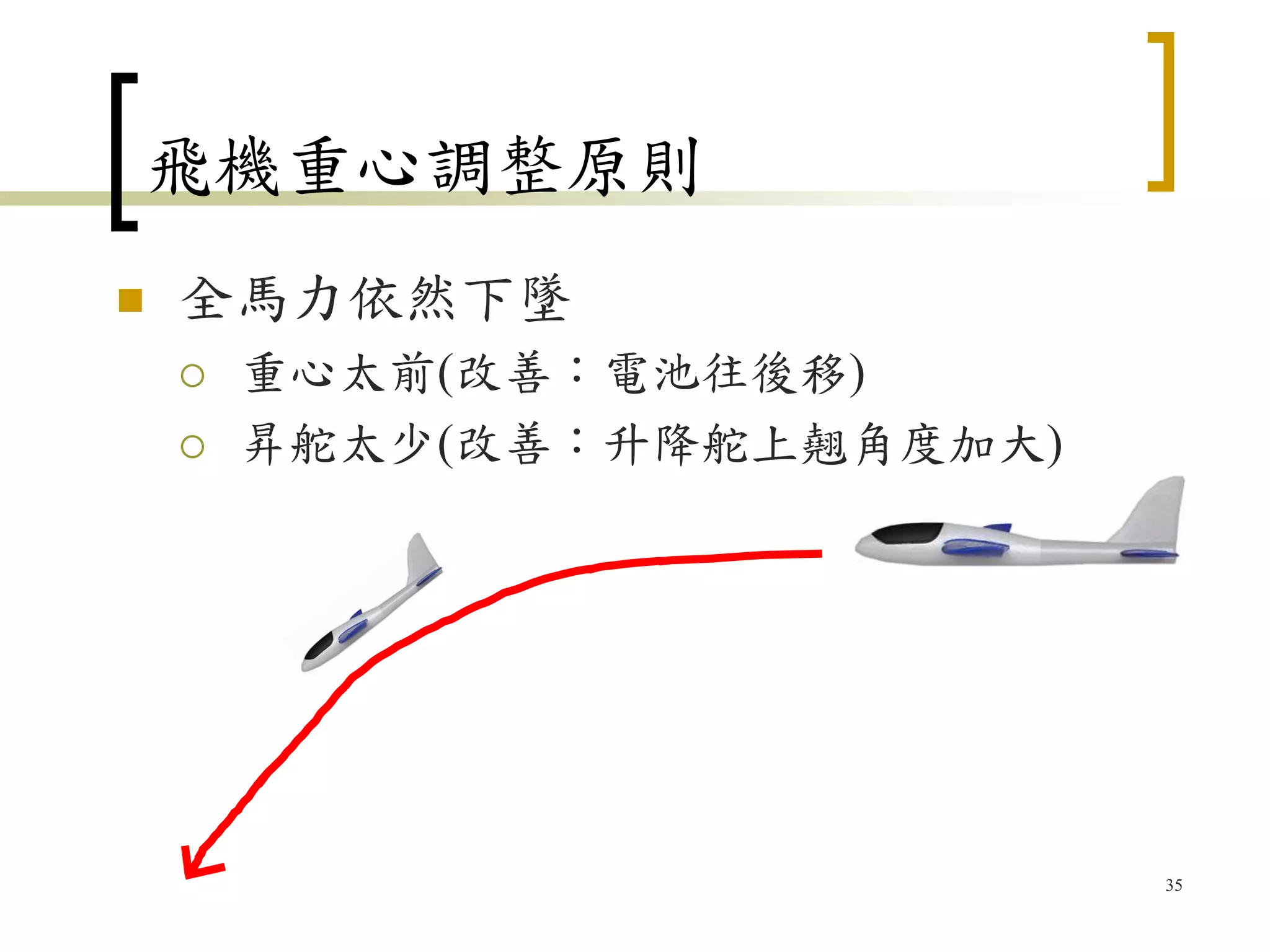
飛機重心調整原則 全馬力依然下墜 重心太前(改善:電池往後移)
昇舵太少(改善:升降舵上翹角度加大) 35
36.
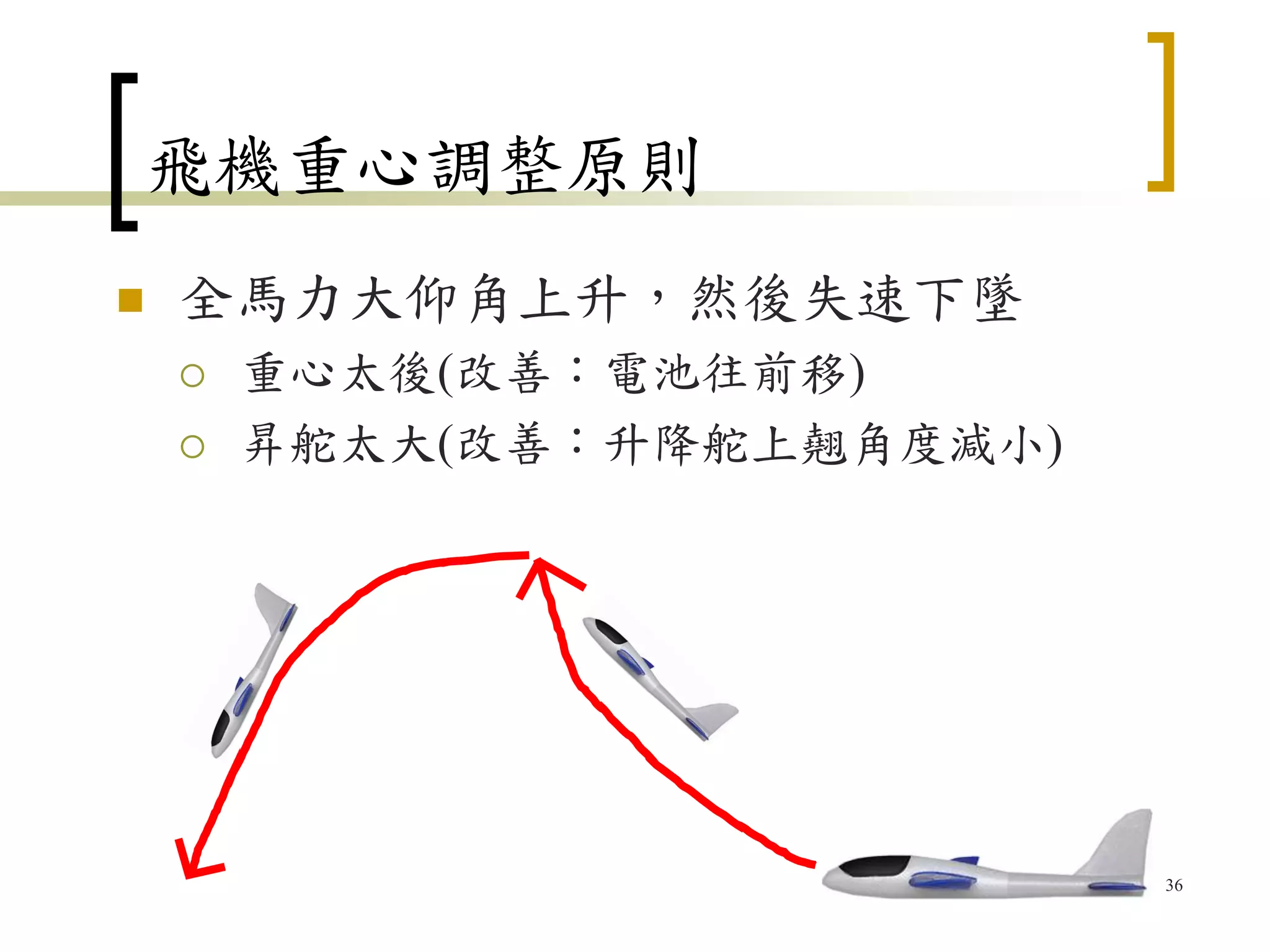
飛機重心調整原則 全馬力大仰角上升,然後失速下墜 重心太後(改善:電池往前移)
昇舵太大(改善:升降舵上翹角度減小) 36
37.
飛機重心調整原則 風大 電池往前移動,重心靠前不易吹翻
風小 電池往後移動,重心靠後抬頭飛行 安裝 App : UAV Forecast 一般風速大於 10km/h 不宜飛行 37 iOS Android
38.
飛機重心調整 重心位置每架飛機都不同 飛機重量、昇舵角度、當天風速都有影響
經過試飛確定電池位置,即可用魔鬼氈定位 38
39.
試飛 在面前飛平面八字圈,測試左右轉彎 39
40.
試飛 測試動力大小,高度/動力變化 40 動力加大就上昇 動力變小就下降
41.
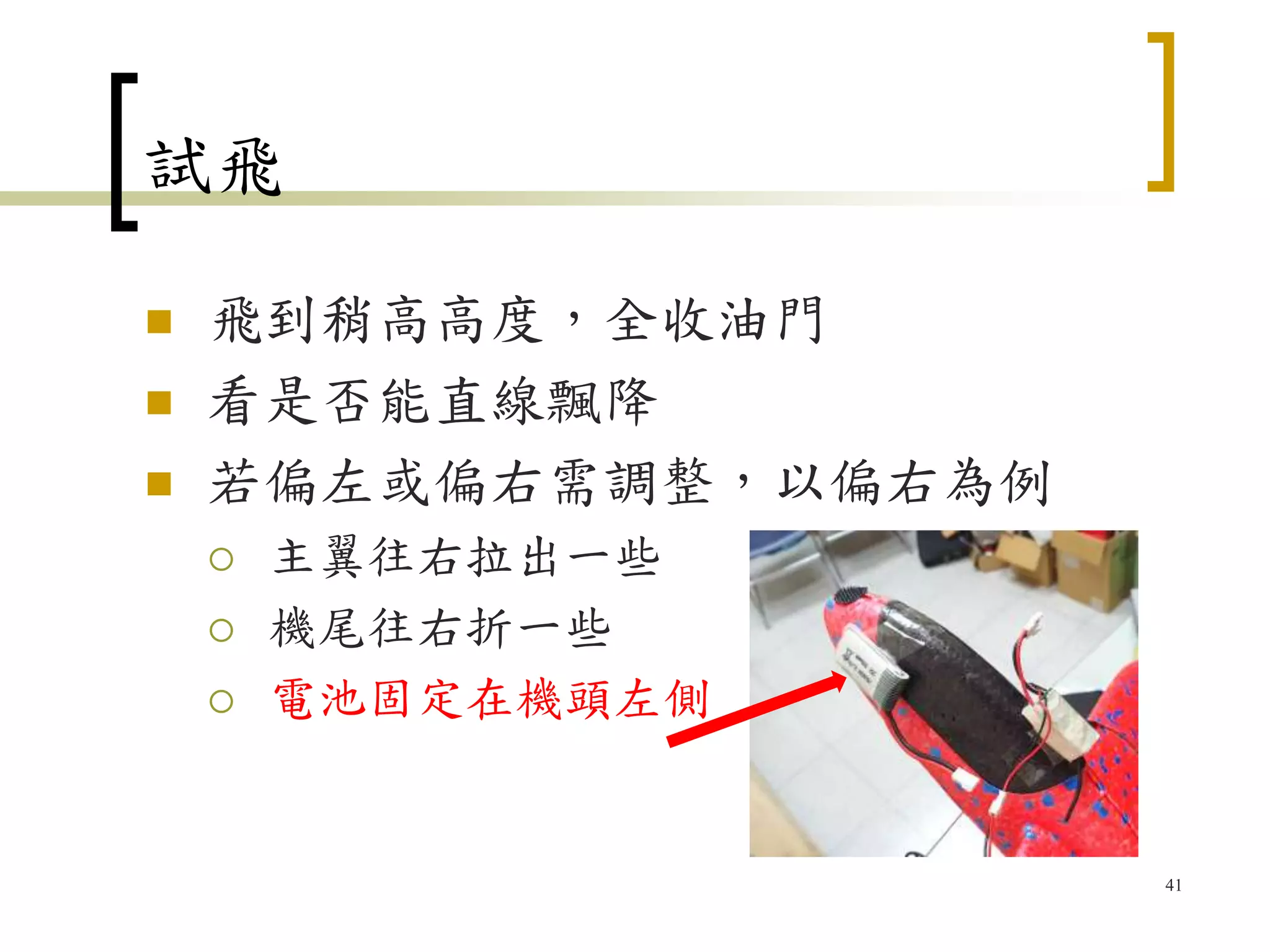
試飛 飛到稍高高度,全收油門 看是否能直線飄降
若偏左或偏右需調整,以偏右為例 主翼往右拉出一些 機尾往右折一些 電池固定在機頭左側 41
42.
飛行後檢查 每趟飛行完畢,均需檢查馬達與馬達座是否鬆脫 因馬達座為3D列印,馬達若高熱會加寬馬達座間隙
若馬達鬆開滑動、則需在馬達黏上小片膠帶彌補間隙 避免馬達持續滑動纏線,造成馬達短路、過熱現象 42
43.
筋斗(Loop)特技飛行 43 逆風 開始位置至少 離地十公尺 全油門爬升 放油門俯衝 全油門爬升
44.
高攻角特技飛行 高抬頭、轉彎極靈敏、飛行空間小 可做各種特技動作(也容易摔….) 44 F/A-18
high angle flight
45.
高攻角特技飛行 將電池往後大幅移動,讓重心向後 45
46.
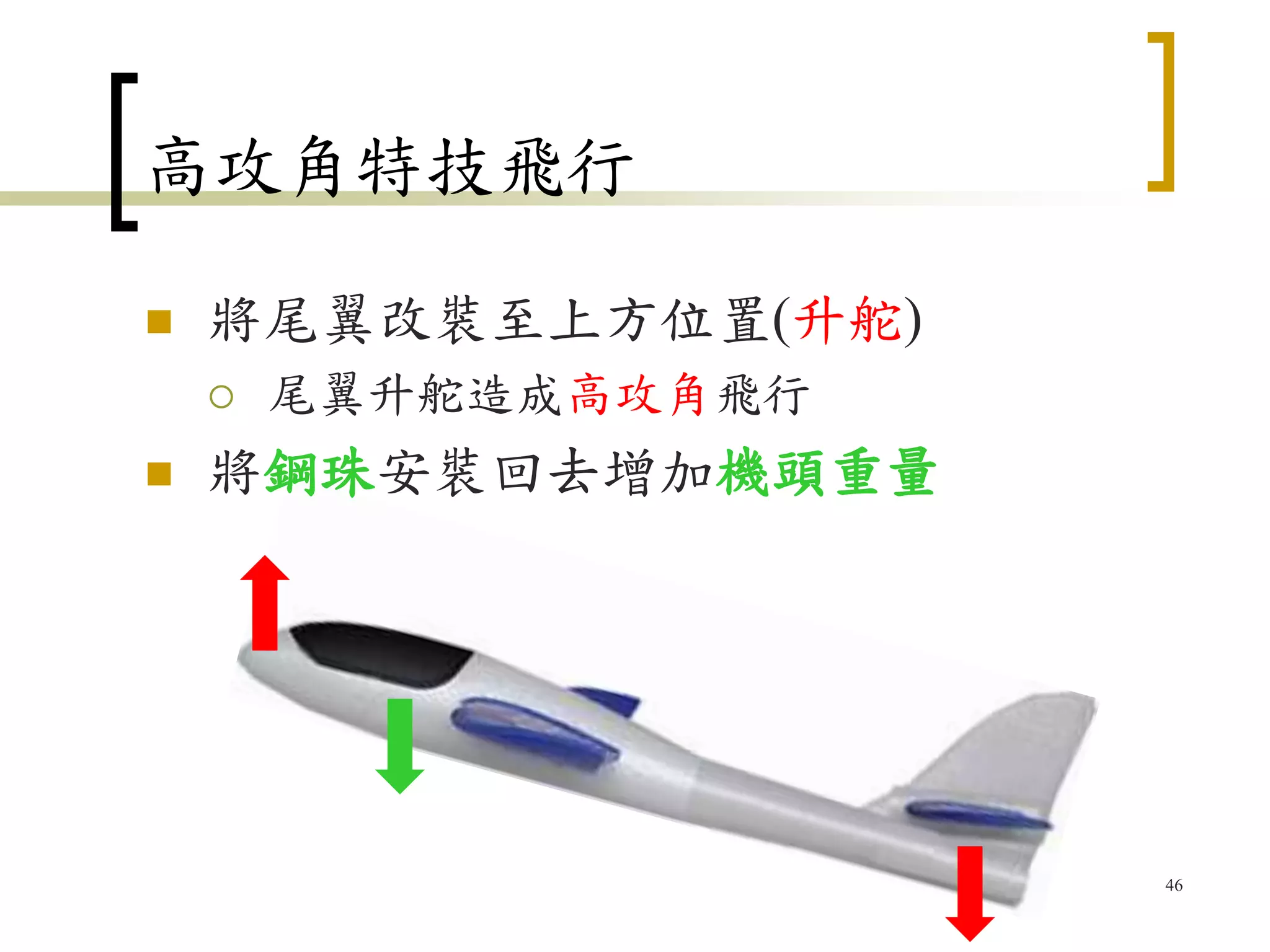
高攻角特技飛行 將尾翼改裝至上方位置(升舵) 尾翼升舵造成高攻角飛行
將鋼珠安裝回去增加機頭重量 46
47.
Enjoy the DIY
flight ! 47
48.
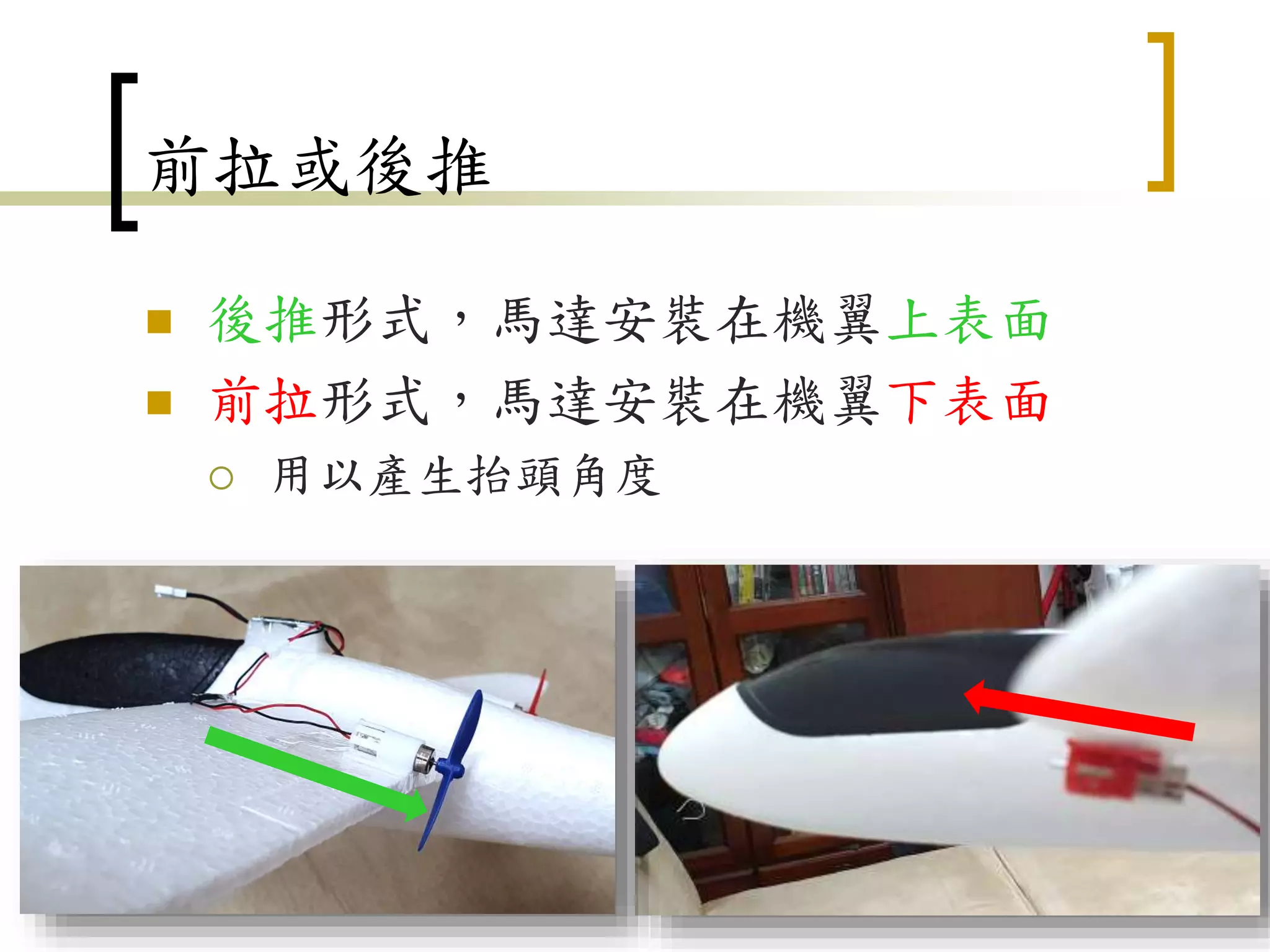
前拉或後推 後推形式,馬達安裝在機翼上表面 前拉形式,馬達安裝在機翼下表面
用以產生抬頭角度 48
49.
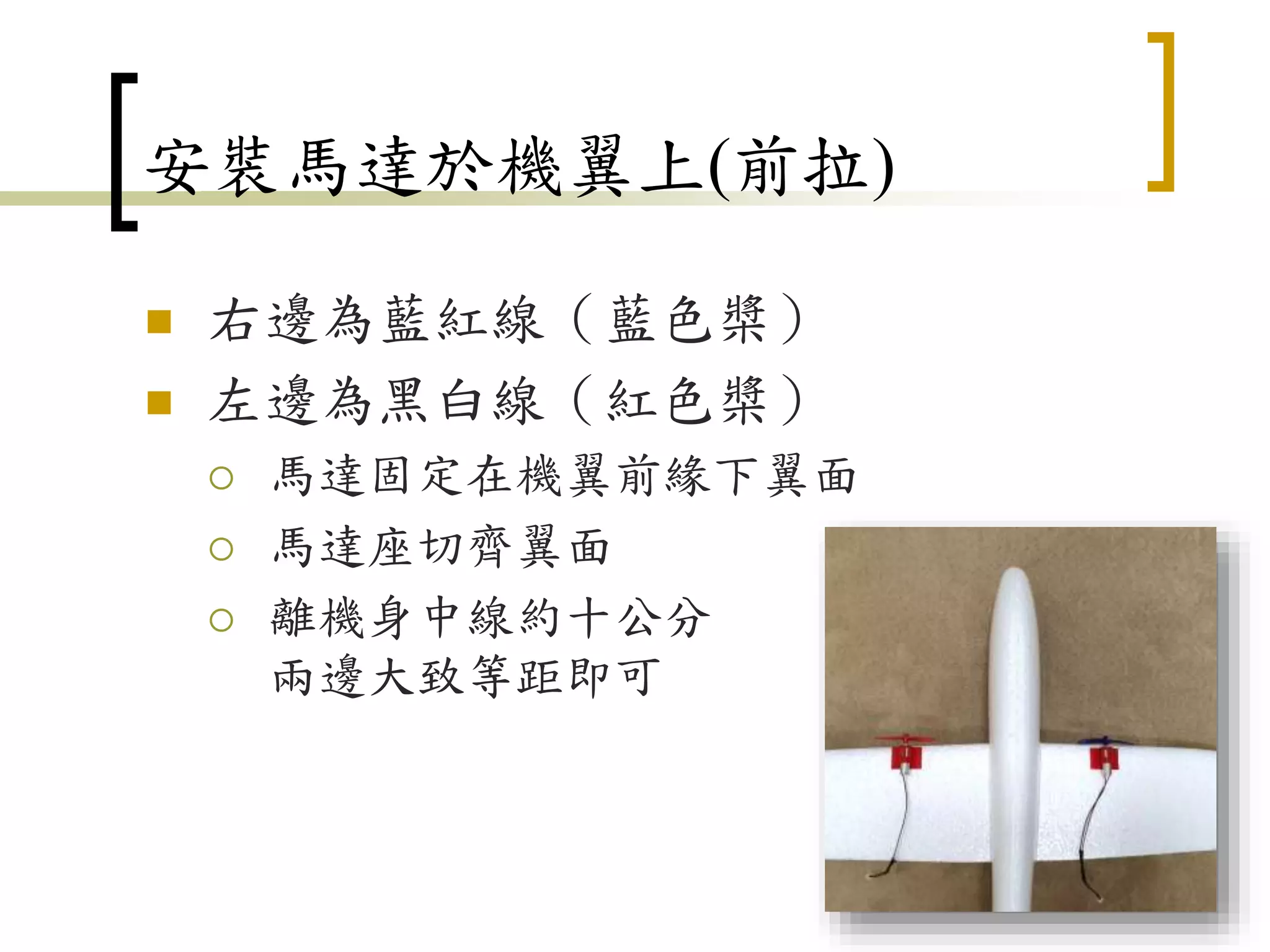
安裝馬達於機翼上(前拉) 右邊為藍紅線(藍色槳) 左邊為黑白線(紅色槳)
馬達固定在機翼前緣下翼面 馬達座切齊翼面 離機身中線約十公分 兩邊大致等距即可 49
50.
安裝馬達於機翼上(前拉) 左右平面上膠帶 50
51.
安裝馬達於機翼上(前拉) 上面再上膠帶 51
52.
安裝 槳葉 安裝馬達於機翼上(前拉) 52 左側黑白線安裝紅槳(圓頭向後)
左側黑紅線安裝藍槳(圓頭向後)
53.
也可改裝65mm槳 安裝馬達於機翼上(前拉) 53
54.
為何沒有舵面卻能飛行與控制? 飛控電路板內建三軸加速計與陀螺儀 感測飛機傾側姿態,即時調整兩邊動力 不斷修正至平飛狀態 54
Download